配网电缆机器人控制方法、装置、电子设备和介质与流程
本公开的实施例涉及计算机,具体涉及配网电缆机器人控制方法、装置、电子设备和介质。
背景技术:
1、随机电网的快速发展和用电量的增加,配网电缆的路线敷设越来越重要。三维模型构建可以以可视化的形式展示配网电缆的敷设情况和设备安全。对于配网电缆机器人的控制,通常采用的方式为:通过电缆全景图像进行电缆三维模型构建,得到电缆全景三维模型。然后,对配网电缆进行故障检测,得到电缆故障信息。最后,通过电缆全景三维模型,生成从配网电缆机器人所在位置至电缆故障信息所在位置的巡检路径,并控制配网电缆机器人进行巡检。
2、然而,实践中发现,当采用上述方式对配网电缆机器人进行控制时,经常会存在如下技术问题一:采用电缆全景图像进行三维模型构建的数据比较单一,易缺失部分配网电缆的物体信息,造成生成的电缆全景三维模型的准确率较低和生成的巡检路径的准确度较低,导致配网电缆机器人的安全性较低和配网电缆的设备的损坏率较高,配网电缆的安全性和稳定性较低。
3、在采用技术方案来解决上述技术问题一的过程中,往往又会伴随着如下技术问题二:由于配网电缆中存在的细小物体,难以通过电缆全景图像进行纹理信息的准确提取,产生大量冗余和错误的纹理信息,造成目标电缆全景三维模型中存在大量缺失和不完成的部分,目标电缆全景三维模型的准确性较低,进而造成巡检路径的准确率较低,配网电缆机器人的安全性较低和配网电缆的稳定性较低。针对上述技术问题二,常规的解决方案一般是:利用泊松表面重建算法生成配网电缆表面网格模型,然后,利用约束线段信息,对配网电缆表面网格模型包括的直线边缘进行调整,得到配网电缆全景三维模型。然而,上述常规解决方案依然存在如下问题:由于泊松表面重建算法易受噪声数据的影响,以及对重建的表面进行平滑会丢失一些细节信息和物体尖锐部分信息,导致配网电缆全景三维模型的准确率较低。
4、在采用技术方案来解决上述技术问题一的过程中,往往又会伴随着如下技术问题三:由于配网电缆的环境比较复杂,难以准确定位配网电缆机器人的位置,以及规划的路径难以确保精准规避障碍物,生成最短路径和适配配网电缆场景,导致配网巡检机器人的损坏率较高和安全性较低。针对上述技术问题三,常规的解决方案一般是:利用快速搜索随机树算法生成巡检路径,并控制机器人按照巡检路径进行巡检。然而,上述常规解决方案依然存在如下问题:由于快速搜索随机树算法在整个空间内进行随机搜索,会生成一些冗余路径,规划效率较低和不适配配网电缆的狭长隧道环境,导致生成的巡检路径准确率较低,配网电缆机器人的安全性较低。
5、该背景技术部分中所公开的以上信息仅用于增强对本公开构思的背景的理解,并因此,其可包含并不形成本国的本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本公开的内容部分用于以简要的形式介绍构思,这些构思将在后面的具体实施方式部分被详细描述。本公开的内容部分并不旨在标识要求保护的技术方案的关键特征或必要特征,也不旨在用于限制所要求的保护的技术方案的范围。
2、本公开的一些实施例提出了配网电缆机器人控制方法、装置、电子设备和介质,来解决以上背景技术部分提到的技术问题中的一项或多项。
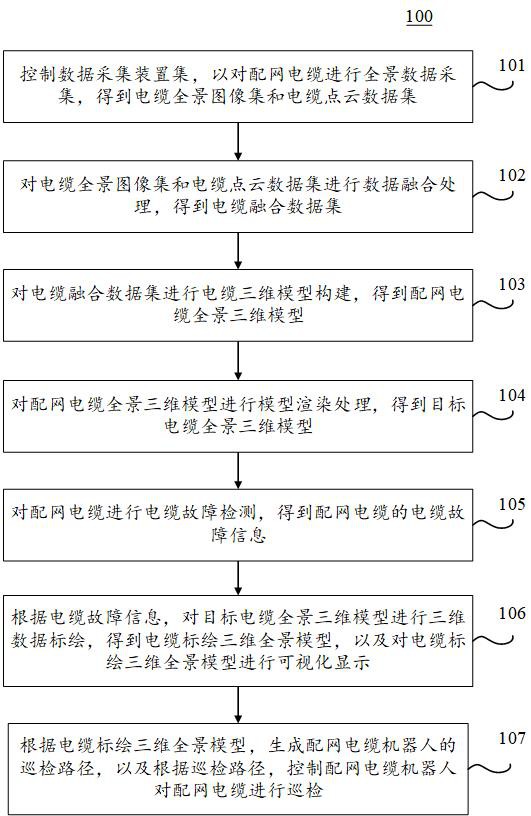
3、第一方面,本公开的一些实施例提供了一种配网电缆机器人控制方法,包括:控制数据采集装置集,以对配网电缆进行全景数据采集,得到电缆全景图像集和电缆点云数据集;对上述电缆全景图像集和上述电缆点云数据集进行数据融合处理,得到电缆融合数据集;对上述电缆融合数据集进行电缆三维模型构建,得到配网电缆全景三维模型;对上述配网电缆全景三维模型进行模型渲染处理,得到目标电缆全景三维模型;对上述配网电缆进行电缆故障检测,得到上述配网电缆的电缆故障信息;根据上述电缆故障信息,对上述目标电缆全景三维模型进行三维数据标绘,得到电缆标绘三维全景模型,以及对上述电缆标绘三维全景模型进行可视化显示;根据上述电缆标绘三维全景模型,生成配网电缆机器人的巡检路径,以及根据上述巡检路径,控制上述配网电缆机器人对上述配网电缆进行巡检。
4、第二方面,本公开的一些实施例提供了一种配网电缆机器人控制装置,包括:第一控制单元,被配置成控制数据采集装置集,以对配网电缆进行全景数据采集,得到电缆全景图像集和电缆点云数据集;数据融合单元,被配置成对上述电缆全景图像集和上述电缆点云数据集进行数据融合处理,得到电缆融合数据集;三维模型构建单元,被配置成对上述电缆融合数据集进行电缆三维模型构建,得到配网电缆全景三维模型;模型渲染单元,被配置成对上述配网电缆全景三维模型进行模型渲染处理,得到目标电缆全景三维模型;电缆故障检测单元,被配置成对上述配网电缆进行电缆故障检测,得到上述配网电缆的电缆故障信息;三维数据标绘单元,被配置成根据上述电缆故障信息,对上述目标电缆全景三维模型进行三维数据标绘,得到电缆标绘三维全景模型,以及对上述电缆标绘三维全景模型进行可视化显示;第二控制单元,被配置成根据上述电缆标绘三维全景模型,生成配网电缆机器人的巡检路径,以及根据上述巡检路径,控制上述配网电缆机器人对上述配网电缆进行巡检。
5、第三方面,本公开的一些实施例提供了一种电子设备,包括:一个或多个处理器;存储装置,其上存储有一个或多个程序,当一个或多个程序被一个或多个处理器执行,使得一个或多个处理器实现如第一方面中任一实现方式描述的方法。
6、第四方面,本公开的一些实施例提供了一种计算机可读介质,其上存储有计算机程序,其中,计算机程序被处理器执行时实现如第一方面中任一实现方式描述的方法。
7、本公开的上述各个实施例中具有如下有益效果:本公开的一些实施例的配网电缆机器人控制方法可以提高目标电缆全景三维模型的准确率,更直观的显示配网电缆的设备运行情况,提高巡检路径的准确性和配网电缆的安全性。具体来说,造成相关的配网电缆机器人的安全性较低和配网电缆的设备的损坏率较高,配网电缆的安全性和稳定性较低的原因在于:采用电缆全景图像进行三维模型构建的数据比较单一,易缺失部分配网电缆的物体信息,造成生成的电缆全景三维模型的准确率较低和生成的巡检路径的准确度较低,导致配网电缆机器人的安全性较低和配网电缆的设备的损坏率较高,配网电缆的安全性和稳定性较低。基于此,本公开的一些实施例的配网电缆机器人控制方法可以首先,控制数据采集装置集,以对配网电缆进行全景数据采集,得到电缆全景图像集和电缆点云数据集。在这里,电缆全景图像集和电缆点云数据集用于后续进行数据融合。其次,对上述电缆全景图像集和上述电缆点云数据集进行数据融合处理,得到电缆融合数据集。在这里,可以提高电缆融合数据集的数据质量,减少数据量。再次,对上述电缆融合数据集进行电缆三维模型构建,得到配网电缆全景三维模型。在这里,通过数据质量更高的数据进行三维建模,可以提高配网电缆全景三维模型的准确性。接着,对上述配网电缆全景三维模型进行模型渲染处理,得到目标电缆全景三维模型。在这里,可以使得到的目标电缆全景三维模型更加贴合真实的配网电缆,提高目标电缆全景三维模型的准确性。随后,对上述配网电缆进行电缆故障检测,得到上述配网电缆的电缆故障信息。在这里,可以及时发现配网电缆发生的故障,提高维修速率和配网电缆的安全性。然后,根据上述电缆故障信息,对上述目标电缆全景三维模型进行三维数据标绘,得到电缆标绘三维全景模型,以及对上述电缆标绘三维全景模型进行可视化显示。在这里,以可视化的形式进行三维数据标绘,可以更加直观,也便于全面掌握配网电缆的情况。最后,根据上述电缆标绘三维全景模型,生成配网电缆机器人的巡检路径,以及根据上述巡检路径,控制上述配网电缆机器人对上述配网电缆进行巡检。在这里,可以提高巡检路径的准确性、配网电缆机器人的安全性、配网电缆的安全性和稳定性。由此可得,该配网电缆机器人控制方法可以通过电缆全景图像和电缆点云数据的融合,可以提高生成的目标电缆全景三维模型的准确率,以及通过故障信息,对目标电缆全景三维模型的标绘,可以更直观的显示配网电缆的设备运行情况,利用生成的巡检路径控制配网电缆机器人进行巡检,可以提高巡检路径的准确性和配网电缆的安全性。
- 还没有人留言评论。精彩留言会获得点赞!