一种基于无人机影像的库区地质灾害差分识别方法与流程
本发明涉及地质灾害预警,具体涉及一种基于无人机影像的库区地质灾害差分识别方法。
背景技术:
1、通过无人机数据采集,实现在地质灾害发生前,对其地灾发生的概率及危险性进行评估,对于保障人民生命财产安全有着重要意义,且地质灾害往往发生在危险或难以到达的地区,使用无人机可以避免人员直接进入危险区域,减少人员伤亡的风险;无人机可以从不同的角度和高度获取影像数据,包括垂直、斜视和俯视等,从而提供全面的信息,有助于更准确地识别地质灾害的类型和范围。目前,粒子图像测速技术(particle imagevelocimetry,piv)在地质灾害监测领域尤其是库区监测中扮演着重要角色,主要用于分析和监测流体运动和表面变形。近年来,随着无人机技术的发展,将piv技术与无人机影像相结合,为监测地质灾害提供了新的可能性。
2、然而,传统的piv技术中普遍采用的归一化互相关算法(normalized crosscorrelation,ncc)在处理无人机获取的地质灾害影像时,虽然可以满足lspiv技术的基本要求,但其在计算过程中出现的错误矢量却明显较传统piv测量多了许多。具体地,在基于无人机影像的lspiv技术的实施过程中,相机与待测目标物体距离相距更远,导致处理精度无法满足地质灾害识别任务的需求。
技术实现思路
1、为了解决传统的piv技术中普遍采用的归一化互相关算法在处理无人机获取的地质灾害影像时,存在出现的错误矢量较多的技术问题,本发明的目的在于提供一种基于无人机影像的库区地质灾害差分识别方法,所采用的技术方案具体如下:
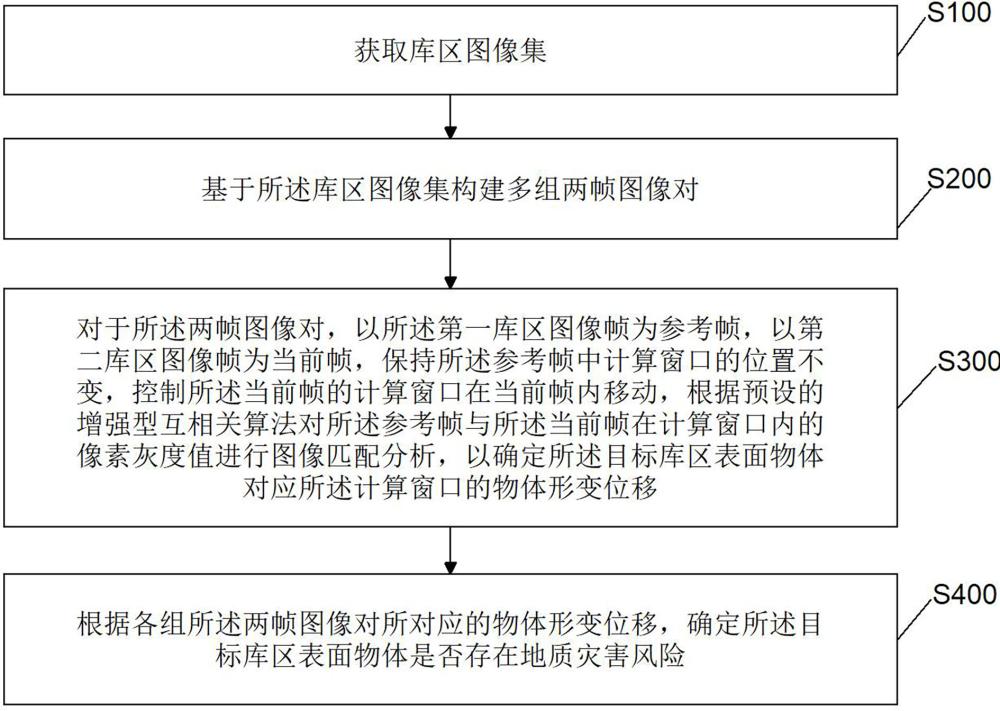
2、获取库区图像集;所述库区图像集包含多个由无人机相机所采集的针对库区范围的库区图像帧;所述库区范围包含多个待进行识别的库区表面物体;
3、基于所述库区图像集构建多组两帧图像对;每组所述两帧图像对均包含不同的图像采集时刻的第一库区图像帧和第二库区图像帧,且所述第一库区图像帧和所述第二库区图像帧为包含目标库区表面物体的库区图像帧;
4、对于所述两帧图像对,以所述第一库区图像帧为参考帧,以第二库区图像帧为当前帧,保持所述参考帧中计算窗口的位置不变,控制所述当前帧的计算窗口在当前帧内移动,根据预设的增强型互相关算法对所述参考帧与所述当前帧在计算窗口内的像素灰度值进行图像匹配分析,以确定所述目标库区表面物体对应所述计算窗口的物体形变位移;所述增强型互相关算法采用最小平方差算法,以通过最小化两帧图像对的像素灰度平方差来识别参考帧与当前帧在计算窗口中最匹配的像素区域;
5、根据各组所述两帧图像对所对应的物体形变位移,确定所述目标库区表面物体是否存在地质灾害风险。
6、优选的,所述根据预设的增强型互相关算法对所述参考帧与所述当前帧在计算窗口内的像素灰度值进行图像匹配分析,包括:
7、两帧图像对的像素灰度平方差的计算公式为:
8、;
9、其中,和分别表示参考帧和当前帧所对应的图像像素矩阵,所述图像像素矩阵中的矩阵元素为计算窗口中的图像灰度值;表示两帧图像对的像素灰度平方差;和分别表示计算窗口分别在x轴方向和y轴方向上的长度;和分别表示所述目标库区表面物体变形前后对应所述两帧图像对中计算窗口在x轴方向和y轴方向的位移值;和分别表示两帧图像对中计算窗口的灰度值分布函数;为参考帧中坐标为的像素点的灰度值;为当前帧中坐标为的像素点的灰度值。
10、优选的,所述根据各组所述两帧图像对所对应的物体形变位移,确定所述目标库区表面物体是否存在地质灾害风险,包括:
11、针对各组所述两帧图像对所对应的物体形变位移,将所述物体形变位移分别与预设位移阈值进行比较,以筛选超过所述预设位移阈值的计算窗口作为目标计算窗口,并在所述两帧图像对中标注所述目标计算窗口所对应的形变位移向量;所述形变位移向量包含形变位移距离和形变位移方向;
12、根据各组经标注了相应的形变位移向量的两帧图像对,以二维多项式曲面拟合针对所述目标库区表面物体的形变位移曲面区域;
13、根据所述形变位移曲面区域,评估所述目标库区表面物体所对应的地质灾害风险。
14、优选的,所述根据各组经标注了相应的形变位移向量的两帧图像对,以二维多项式曲面拟合针对所述目标库区表面物体的形变位移曲面区域,包括:
15、构建针对在x轴方向上的形变位移向量的多项式模型:
16、,
17、构建针对在y轴方向上的形变位移向量的多项式模型:
18、,
19、其中,表示对应所述目标库区表面物体的在图像帧中的位置点的坐标,和分别表示图像帧中每个位置点的水平位移和垂直位移的预测值;分别表示中多项式的系数,以及分别表示中多项式的系数,其是通过最小二乘法而计算得到的,使得拟合曲面能有效表示形变位移向量的分布。
20、优选的,所述根据所述形变位移曲面区域,评估所述目标库区表面物体所对应的地质灾害风险,包括:
21、,
22、其中,表示在位置点处的地质灾害风险评估值;和分别表示水平和垂直位移曲面在位置点的梯度;和分别表示水平位移曲面和垂直位移曲面在位置点的曲率;分别表示相应的权重系数,用于权衡梯度和曲率对风险评估结果的影响程度。
23、优选的,所述对于所述两帧图像对,以所述第一库区图像帧为参考帧,以第二库区图像帧为当前帧,保持所述参考帧中计算窗口的位置不变,控制所述当前帧的计算窗口在当前帧内移动,根据预设的增强型互相关算法对所述参考帧与所述当前帧在计算窗口内的像素灰度值进行图像匹配分析,以确定所述目标库区表面物体对应所述计算窗口的物体形变位移,包括:
24、针对各组所述两帧图像对,将所述两帧图像对依据多个计算窗口进行相应多轮次的图像匹配分析,以确定所述目标库区表面物体对应各个所述计算窗口的窗口物体形变位移,根据各个所述窗口物体形变位移确定所述物体形变位移;其中,各个所述计算窗口所对应的窗口长度互异。
25、优选的,计算窗口的窗口长度是根据初始计算窗口确定的,且所述计算窗口的窗口长度随着图像匹配分析的轮次数量而等比例缩小。
26、优选的,确定初始计算窗口的窗口长度的过程为:
27、解析所述两帧图像对所对应的图像像素分辨率;
28、根据所述两帧图像对中对应所述目标库区表面物体的图像特征信息和所述图像像素分辨率,确定所述初始计算窗口所对应的窗口大小。
29、优选的,所述基于所述库区图像集构建多组两帧图像对的过程为:
30、从所述库区图像集中筛选出目标图像帧子集;所述目标图像帧子集中的各个库区图像帧均包含所述目标库区表面物体;
31、根据所述目标图像帧子集中各个库区图像帧的图像采集时刻,从所述目标图像帧子集中确定多组两帧图像对;所述两帧图像对包含所述目标图像帧子集中在图像采集时刻上最邻近的两个库区图像帧。
32、优选的,所述根据所述目标图像帧子集中各个库区图像帧的图像采集时刻,从所述目标图像帧子集中确定多组两帧图像对,包括:
33、对于各组所述两帧图像对,确定所述两帧图像对中的最新图像采集时刻与系统当前时间之间的时间差;
34、根据各个所述时间差的排序,为各个所述两帧图像对分配相应的图像匹配分析优先级;其中,在所述各组两帧图像对中,对应所述时间差最小的两帧图像对具有最高的图像匹配分析优先级;依次按照图像匹配分析优先级从大到小的顺序,分别确定两帧图像对。
35、本发明实施例至少具有如下有益效果:
36、(1)本发明实施例通过采用增强型互相关算法中的最小平方差算法,相比传统的ncc算法,能够更准确地识别出图像间微小的变化,可以有效降低错误矢量的出现,提高了基于无人机影像的库区地质灾害识别的精度,尤其是在物体形变位移的精细分析上,提高了物体识别结果的精度。
37、(2)采用增强型互相关算法,通过最小化像素灰度平方差的方式来识别匹配区域,相较于传统的ncc算法,可以更高效地处理大量数据,且具有更小对于快速分析大范围地质灾害场景尤其有利,有效提升了处理效率。
38、(3)由于无人机可以在不同的高度和角度获取图像,通过固定参考帧的计算窗口位置,而允许当前帧的计算窗口在搜索窗口内移动,能够更好地适应无人机拍摄角度和距离的变化。由此,使得算法在处理从不同角度和高度拍摄的图像时更为稳定,适应对不同距离和角度的无人机相机采集图像的处理,增强了对复杂地形区域的地质灾害识别性能。
39、(4)通过分析无人机连续采集的图像来监测库区表面物体的微小形变,这种连续监测能力使得可以及时发现地质灾害的早期迹象,如裂缝的形成和发展,从而提供更有效的灾害预警,提升了灾害预警能力。
40、通过本发明实施例,对传统的piv技术进行改进和优化,在提高地质灾害识别精度、适应性和处理效率等方面具有显著优势,同时具备较强的适用性和灵活性,能够有效支持复杂环境下的地质灾害监测和预警。
- 还没有人留言评论。精彩留言会获得点赞!