三维医学图像标记点排序方法、系统、电子设备及存储介质与流程
本发明属于医学图像处理,涉及一种三维医学图像标记点排序方法、系统、电子设备及存储介质。
背景技术:
1、手术机器人或者手术导航系统中,需要在标定板中植入多个标记点(通常为钢珠),然后扫描三维医学影像。通过标记点相对于标定板的坐标,和在图像中对应的标记点的坐标,可以计算图像空间和物理空间的匹配关系,从而将图像中的手术规划映射到现实物理空间,并执行手术计划。其中,找到物理空间中标定板上的标记点与图像中标记点的对应关系非常重要。现有的方法需要进行复杂的相似度分析,用时较高,成功率不强。例如,专利文献cn107481276a公开的三维医学图像中标记点序列的自动识别方法,还需要生成大量的三角形,并比较三角形的相似度,大大增加了算法的复杂度和时间。
技术实现思路
1、为了改善上述技术问题,本发明提供一种三维医学图像标记点排序方法,包括如下步骤:
2、设计标定板,扫描三维医学图像;
3、将待匹配距离矩阵n’与标准距离模板矩阵n进行对比,找到相似度相同的一行,该行号为三维医学图像中的标记点在标定板物理空间的实际行号;重复上述过程,找到三维医学图像中全部标记点在标定板物理空间的实际行号;完成标记点排序;
4、通过计算标定板物理空间的每个标记点到其余各标记点的距离,经排序、增加差值维度信息,得到所述标准距离模板矩阵n;
5、通过计算三维医学图像的每个标记点到其余各标记点的距离,经排序、增加差值维度信息,得到所述待匹配距离矩阵n’;
6、所述相似度相同的判断标准为n(i,j)-0.2mm<n’(i,j)<n(i,j)+0.2mm,i、j分别为行序号和列序号。
7、根据本发明的实施方案,所述三维医学图像包括但不限于计算机断层扫描(computed tomography,ct)图像、磁共振成像(magneticresonance imaging,mri)、正电子发射断层成像(positron emission computedtomography,pet)等三维医学图像。
8、根据本发明的实施方案,所述标定板上的标记点为球形金属,优选按照设计位置固定在标定板上。
9、根据本发明的实施方案,所述标记点的总数a不少于3个,例如为4个、5个、6个或更多个。标记点坐标需满足的条件为,由这些点生成的标准距离模板矩阵n必须满足:n的每一行n(i)(i=0,1,…,a-1)都与其余所有行n(p)(p=0,1,…,a-1,且p≠i)的相似度都不同,相似度相同判定方法为n(p,j)-0.2mm<n(i,j)<n(p,j)+0.2mm,j为列序号,j=0,1,…,a-1。
10、在一种实施方式中,使用5个标记点,5个标记点在标定板的物理空间内的坐标分别为(0mm,0mm),(10mm,0mm),(30mm,0mm),(0mm,20mm),(20mm,20mm)。
11、根据本发明的实施方案,所述标准距离模板矩阵n通过如下操作获得:
12、s1.对于标定板物理空间的每个标记点pi(i=0,1,2,…,a-1),计算其到其余各标记点的距离dij(j=0,1,2,…,a-2),构成一个a行a-1列的距离模板中间矩阵m1;
13、s2.利用冒泡排序法,对所述距离模板中间矩阵m1的每一行进行从大到小或从小到大排序,并用更新后的结果更新为距离模板中间矩阵m2;
14、s3.计算所述距离模板中间矩阵m2每一行中最大值与最小值的差值,加入到该行的最后,形成一个a行a列的距离模板矩阵n,作为标准距离模板矩阵。
15、根据本发明的实施方案,所述待匹配距离矩阵n’通过如下操作获得:
16、s1’.三维医学图像中每个标记点qi(i=0,1,2,…,a-2),计算其到其余各标记点的距离d’ij(j=0,1,2,…,a-1),构成一个a行a-1列的待匹配距离中间矩阵m’1;
17、s2’.对于所述待匹配距离中间矩阵m’1的每一行进行从大到小或从小到大排序,并用更新后的结果更新待匹配距离中间矩阵m’2;
18、s3’.计算所述待匹配距离中间矩阵m’2每一行中最大值与最小值的差值,加入到该行的最后,形成一个a行a列的待匹配距离矩阵n’。
19、根据本发明的实施方案,所述步骤s2和步骤s2’的排序规则相同。
20、根据本发明的实施方案,所述待匹配距离矩阵n’与标准距离模板矩阵n的对比包括:将待匹配距离矩阵n’的第一行依次与距离模板矩阵n的第一到a行进行对比。
21、根据本发明的实施方案,所述三维医学图像标记点排序方法,包括如下步骤:
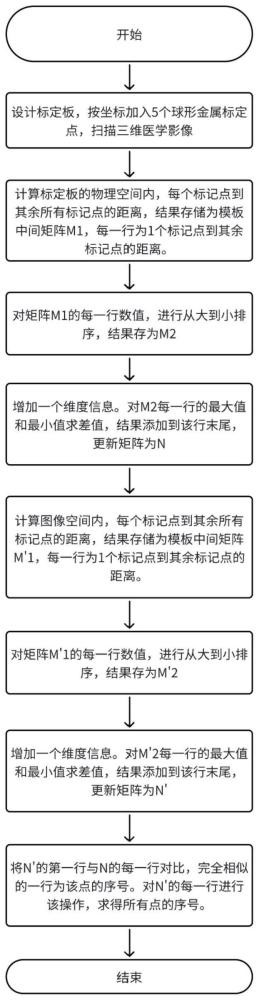
22、s1.设计标定板,扫描三维医学图像;
23、标定板中标记点的总数a不少于3个,对于标定板物理空间的每个标记点pi(i=0,1,2,…,a-1),计算其到其余各标记点的距离dij(j=0,1,2,…,a-2),构成一个a行a-1列的距离模板中间矩阵m1;
24、s2.利用冒泡排序法,对所述距离模板中间矩阵m1的每一行进行从大到小或从小到大排序,并用更新后的结果更新为距离模板中间矩阵m2;
25、s3.计算所述距离模板中间矩阵m2每一行中最大值与最小值的差值,加入到该行的最后,形成一个a行a列的距离模板矩阵n,作为标准距离模板矩阵;
26、s4.三维医学图像中每个标记点qi(i=0,1,2,…,a-2),计算其到其余各标记点的距离d’ij(j=0,1,2,…,a-1),构成一个a行a-1列的待匹配距离中间矩阵m’1;
27、s5.对于所述待匹配距离中间矩阵m’1的每一行进行从大到小或从小到大排序,并用更新后的结果更新待匹配距离中间矩阵m’2;
28、s6.计算所述待匹配距离中间矩阵m’2每一行中最大值与最小值的差值,加入到该行的最后,形成一个a行a列的待匹配距离矩阵n’;
29、s7.将待匹配距离矩阵n’的第一行依次与距离模板矩阵n的第一到a行进行对比,找到相似度相同的一行,该行号为三维医学图像中的标记点在标定板物理空间的实际行号;
30、所述相似度相同的判断标准为n(i,j)-0.2mm<n’(i,j)<n(i,j)+0.2mm,i、j分别为行序号和列序号;
31、s8.重复步骤s7,找到三维医学图像中全部标记点在标定板物理空间的实际行号;完成标记点排序。
32、本发明还提供一种执行上述排序方法的三维医学图像标记点的排序系统,包括:
33、标准距离模板矩阵n模块,通过计算标定板物理空间的每个标记点到其余各标记点的距离,经排序、增加差值维度信息得到;
34、待匹配距离矩阵n’模块,通过计算三维医学图像的每个标记点到其余各标记点的距离,经排序、增加差值维度信息得到;
35、对比模块,将待匹配距离矩阵n’的第一行依次与标准距离模板矩阵n的各行进行对比,找到相似度相同的一行,该行号为三维医学图像中的标记点1在标定板物理空间的实际行号;重复操作,获得三维医学图像中其他标记点在标定板物理空间的实际行号。
36、根据本发明的实施方案,所述标准距离模板矩阵n模块包括:
37、距离模板中间矩阵m1模块,对于标定板物理空间的每个标记点pi(i=0,1,2,…,a-1),计算其到其余各标记点的距离dij(j=0,1,2,…,a-2),构成一个a行a-1列的矩阵;
38、距离模板中间矩阵m2模块,对所述距离模板中间矩阵m1的每一行进行从大到小或从小到大排序;
39、增加差值维度模块,计算所述距离模板中间矩阵m2每一行中最大值与最小值的差值,加入到该行的最后,形成一个a行a列的距离模板矩阵n;
40、根据本发明的实施方案,所述待匹配距离矩阵n’模块包括:
41、待匹配距离中间矩阵m’1模块用于将三维医学图像中每个标记点qi(i=0,1,2,…,a-2),计算其到其余各标记点的距离d’ij(j=0,1,2,…,a-1),构成一个a行a-1列的待匹配距离中间矩阵m’1;
42、待匹配距离中间矩阵m’2模块,用于将所述待匹配距离中间矩阵m’1的每一行进行从大到小或从小到大排序,
43、增加差值维度模块,计算所述待匹配距离中间矩阵m’2每一行中最大值与最小值的差值,加入到该行的最后,形成一个a行a列的待匹配距离矩阵n’。
44、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述三维医学图像标记点排序方法的步骤。
45、本发明还提供一种计算机可读取存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述三维医学图像标记点排序方法的步骤。
46、有益效果
47、本发明提供的三维医学图像中标记点排序方法具有鲁棒性强,效率高、成功率高的特点。实验显示,100次重复实验中成功率100%,用时小于0.5s。
- 还没有人留言评论。精彩留言会获得点赞!