基于可解释时空图卷积网络的多传感数据融合诊断方法
本发明属于旋转机械智能故障诊断领域,具体涉及一种基于可解释时空图卷积网络的多传感数据融合诊断方法。
背景技术:
1、在工业生产过程中,大型机械设备往往需要在高速、重载的恶劣条件下长期运行,其中旋转机械齿轮、轴承等关键部件发生故障可能会造成设备停机甚至失控,进而导致经济损失和人员伤亡。工程应用中往往采用多个传感器监测机械设备长期运行状态,以深度学习为代表的智能故障诊断具有“端到端”的特性,能够直接对海量工业数据进行分析,在故障发生前评估设备运行状态和预警潜在故障位置,对于保证设备稳定运行、提高生产效率、降低生产成本有着重大意义。
2、深度学习算法能够通过融合多个传感器的振动加速度数据更好的提取设备运行特征,更全面地描述和分析系统状态,提高故障诊断的鲁棒性和准确性。虽然现有的基于卷积神经网络及其改进的智能故障诊断方法已经在多传感器数据故障诊断领域取得了不错的效果,但是它仍旧存在一定的局限性:(1)信号故障特征提取往往只考虑时序特征而忽视了空间信息。多传感数据的智能故障诊断一般是通过将多个来自不同传感器的时序信号直接拼接在一起作为一个较长的一维信号或构造成二维图像送入深度学习网络中,本质上并未考虑不同传感器之间相互作用的空间信息特征;(2)传统的智能诊断方法在应对多传感数据时,并未对各个传感器在诊断过程中起作用的程度进行判别,故障特征微弱的传感器数据会增大深度学习模型误诊断概率;(3)缺乏对学习的特征进行可解释性分析,在工程应用中可信度低。
3、为了实现故障诊断任务下多传感数据的有效利用,很多国内外学者对如何融合多传感器信息进行复杂机械设备的高精度诊断进行了深入研究。其中,基于卷积神经网络的多传感融合方法在近年来成为了该领域的研究重点。例如,夏晗铎等提出的基于卷积神经网络的齿轮箱故障诊断方法利用连续小波变换将多传感数据转化为二维时频图,以多通道时频图作为输入送入构建好的卷积神经网络模块中,实现多传感信号融合和关键特征提取,从而提高故障诊断精度。(夏晗铎,郝如江,程旺.基于多传感器数据融合的齿轮箱故障诊断方法[j].国防交通工程与技术,2022,20(03):26-29.)
4、虽然此类将多传感数据拼接或构造二维图像的方法已经被证明对旋转机械故障诊断精度提高有一定作用,但是该方法完全未考虑不同传感器之间的空间耦合关系,无法充分利用传感器之间的关联和互补信息,信息的融合策略对于最终的故障诊断结果可能产生限制并影响准确性;并且该方法缺乏可解释性分析会导致所提模型可信度低,大大限制了此类多传感融合方法在工程实际中的应用。
技术实现思路
1、为了至少解决现有技术存在的问题之一,本发明设计了一种基于可解释时空图卷积网络的多传感数据融合诊断方法。首先,通过构建门控卷积层以学习并增强时间特征;其次,结合传感器空间布局关系和图卷积网络多传感信息融合能力,学习并提取多传感器数据的空间特征,实现高准确率故障诊断;最后,利用改进梯度类激活映射算法分析各传感器数据对模型诊断决策过程的重要度,从而提升模型更新过程的可解释性。
2、为了实现本发明目的,本发明提供的基于可解释时空图卷积网络的多传感数据融合诊断方法,包括步骤:
3、步骤1:振动数据采集:分别从旋转机械在不同实验工况下获得多个传感器的振动加速度信号,对采集到的监测信号用无重叠的滑窗进行切割,设采集到的监测信号来自于n个振动传感器,将第i个传感器的信号sensori被滑窗切割为m段长度为l的片段,即sensori={xi1,xi2,xi3,…,xim},其中,xim为第i个传感器第m段信号。
4、步骤2:空间关系图和邻接矩阵构建:图卷积网络的输入包含了图结构节点特征和代表各个节点关联关系的邻接矩阵,根据实验台中各个振动传感器的空间位置关系构建空间关系图,选择来自于n段来自于不同振动传感器的多传感信号构建一张含有n个节点的子图subgraphaj,其中,a为振动传感器编号,j为截取的信号片段编号,构建一个具有维度为n×n的邻接矩阵a;
5、步骤3:数据集划分:选择选择所有多传感器数据中若干个样本组成训练集其余样本组成测试集其中,xi和yi分别表示第i个子图及其对应的标签,k为训练集的样本数量,m为样本总数;
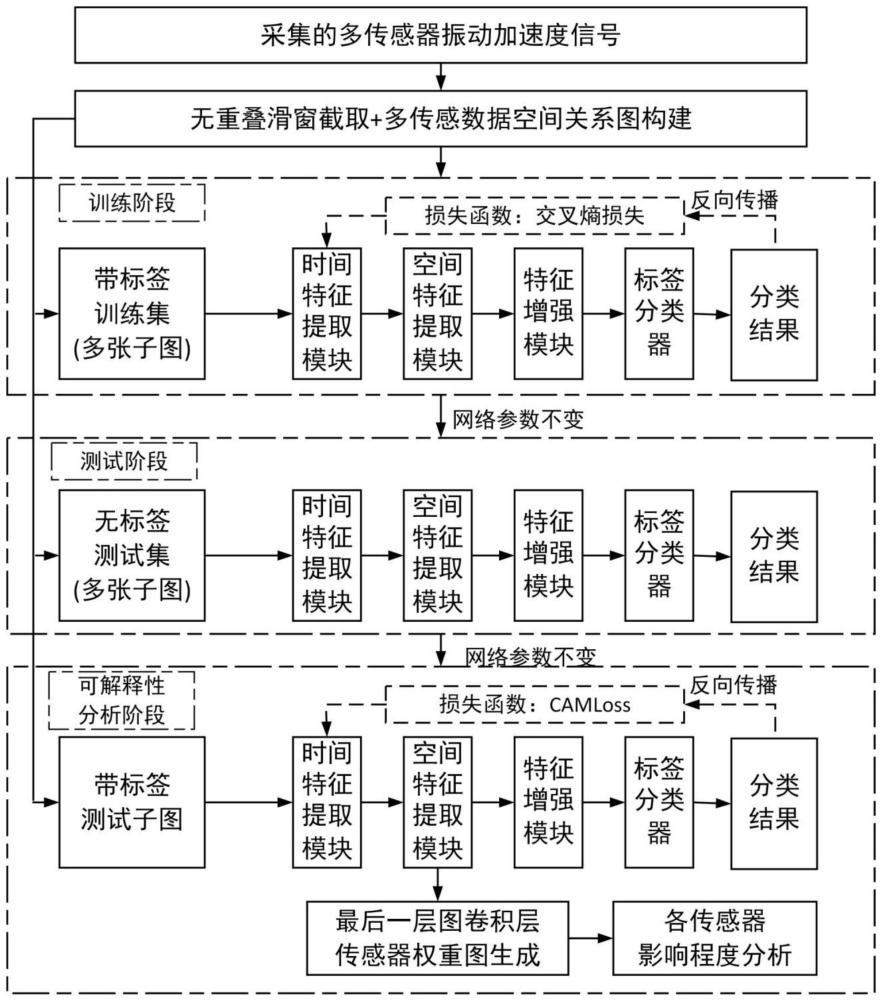
6、步骤4:模型训练:构造出用于特征增强的时空图卷积网络模块,包括:时间特征提取模块t1、两个空间特征提取模块s1/s2、特征增强模块e1和全连接层模块f1,其中时间特征提取模块t1用于提取时间信息特征,空间特征提取模块s1、s2用于取空间信息特征,特征增强模块e1用于在维度不变的情况下增强信号特征,最后送入全连接层模块f1进行故障分类;将训练集送入时空图卷积网络模块,采用卷积网络算法、图卷积网络和梯度下降法对时空图卷积网络模块中的特征参数进行优化训练,并输出分类结果;
7、步骤5:可解释性分析:保留步骤4中得到的时空图卷积网络模块,保留训练权重参数,构造新的类激活损失,将单张子图sensori={xi1,xi2,xi3,…,xik}作为模型输入,输出空间特征提取模块s2中最后一个图卷积层的改进类激活映射情况作为该传感器节点权重,进行可解释性分析。
8、进一步地,在步骤4后还包括模型验证步骤:使用测试集输入已经训练好的时空图卷积网络模块中,输出分类结果。
9、具体地,包含(m-k)个子图的测试集将以训练集dtrain所训练的时空图卷积网络模块来进行测试,每张子图里的各个节点特征都会输出分类结果。
10、进一步地,步骤1中,从振动加速度信号中截取数据段时,是从所有振动传感器加速度信号中等长度的截取样本,各样本的数据点之间无重叠,减少信号可解释性分析部分重叠信号对分析结果的影响,提高算法可信度。
11、进一步地,步骤2中,构造空间关系图的多传感数据来自同一时间片段,即这些数据处于相同的运行工况和标签,为提高网络的运算效率,往往选择部分节点构建子图后分批次训练;邻接矩阵a是表示节点之间关系的关联矩阵,当节点数量为n时,所构造的邻接矩阵维度为n×n,构建一个具有维度为n×n的邻接矩阵a,a[a,b]的权重数值越接近于1,代表传感器a与传感器b关系越紧密,信号传递性越强;通过两个传感器的空间位置评估关联程度,包括且不限于:传感器是否处于同一级传动、传感器固定部件位置是否接近、传感器采集的振动方向是否相同。
12、进一步地,步骤3中,训练集dtrain和测试集dtest的数据特征分布相同,且标签空间相同。
13、进一步地,步骤4中,时间特征提取模块t1、特征增强模块e1均包括一个门控卷积层、平均池化层、批量归一化层,空间特征提取模块包括图卷积层、平均池化层、批量归一化层,全连接层模块f1包括全连接层、dropout层、全连接层;
14、进一步地,步骤4中,门控卷积层包括两个传统的一维卷积层,以连续的时序片段作为输入,具有减轻梯度传播作用,通过对连续时间片段上的节点特征进行合并来实现特征增强,其数学模型定义如下:
15、
16、式中,h(l+1)为gated-cnn模块在第(l+1)层时的输出,w1(l)和为维度相同的卷积核,和模型的偏置,h(l)为gated-cnn模块在第l层时的输入,为特征卷积过程,σ(·)为sigmoid激活函数。
17、图卷积层以连续的子图作为输入,能够聚合多个节点之间的信息,在多传感融合中能够提取到振动传感器数据中有效特征成分,其数学模型定义如下:
18、
19、式中为第l层的输入,维度为n×d(l),其中,n为节点数目,d(l)是第l层卷积提取到的特征向量长度,a=a+i为邻阶矩阵加单位矩阵,物理意义为该节点获得了自身信息和周围节点信息,该层权重其中,d(l+1)是第l+1层卷积提取到的特征向量长度。在反向传播过程中得到参数更新,relu(·)为模型选用的relu非线性激活函数,b(l)为第l层的偏置。
20、进一步地,步骤5中,将已知标签的第k张子图subgraphk∈rn×1×m作为可解释性阶段的输入,xk的标签yk={y1k,y2k,y3k,…,ynk},yk∈rn×1×c,式中xik表示第i个传感器采集到的第k段信号的特征,yik表示该段信号故障类型,通过新构造的类激活损失结合梯度更新参数图结构中节点的重要程度,定义新的类激活损失函数camloss为:
21、
22、式中zk={z1k,z2k,z3k,…,znk},zk∈rn×1×c是xk输入模型后最终分类输出,argmax(·)是函数获得的最终分类输出的最大值,以定义的类激活损失函数camloss作为stgcn的损失函数进行模型训练,该损失函数的物理意义是使得预测的各个节点的分类结果zk尽量接近yk。
23、进一步地,步骤6中,将第k张子图subgraphk输入以camloss为损失函数的时空图卷积网络模块,该模块中各参数与测试阶段相同不变,将各个节点的信息视作多个不同的特征层,计算第s个传感器节点对于最终分类结果的影响程度
24、
25、式中ye是最终分类结果输出为第e类故障的概率,的物理意义为第s传感器个的第i个特征点特征点对指定类型分类结果的重要性,将反向更新过程中图卷积层2的梯度变化记为gtotal={g1,g2,g3,…,gn},计算得标签为第e类故障的第k张子图各传感器的权重
26、本发明还公开基于可解释时空图卷积网络的多传感数据融合诊断装置。
27、本发明还公开一种设备。
28、本发明还公开一种计算机可读存储介质。
29、与现有技术相比,本发明的有益效果至少如下:
30、1、本发明采用具有门控卷积和图卷积的特征提取器,提取多传感信号时空信息,具有一定的信号降噪和微弱特征增强作用,同时避免了人为特征提取,减少了对信号处理等专业知识的依赖性,可以有效地提取数据高维特征。
31、2、本发明提出了根据传感器空间和功能关系构造关联关系图的方法,为图神经网络在旋转机械故障诊断领域的应用提供了一种符合机理的新方案。
32、3、本发明提出了一种可解释性特征可视化模块,构造了一种新的适配图神经网络的损失函数,在时域信号作为输入时,通过分析各个传感器对于故障分类的影响程度,提高了模型可信度,使其具有一定的工业应用价值;
33、4、本发明所提出的可解释性模块具有良好的适配性,不仅适用于所提的可解释时空图卷积网络,同时也适用于各种常见的图神经网络(如图注意力网络,谱图卷积网络),本发明方法是借助图卷积过程中反向传播时各个节点的梯度变化情况进行事后可解释性分析,而图神经网络大多通过反向传播更新节点梯度特征,因此本发明可以在无须改变模型结构的前提下即可实现对图卷积结构提取到的时序特征进行可解释性分析。
- 还没有人留言评论。精彩留言会获得点赞!