一种基于时空图神经网络的井位及井控参数优化方法
本发明属于油气田开发工程领域,具体涉及一种基于时空图神经网络的井位及井控参数优化方法。
背景技术:
1、通过向油藏中注入二氧化碳来提高采收率(eor)是典型的三次采油手段,这也有利于碳捕集与封存(ccus)的发生,注co2可以同时为油气增产和co2封存两个重要过程铺平道路,这种一般被称作ccus-eor技术。co2在地下不仅可以与原油混相来提高驱油效率,同时还伴随着大量co2被封存在储层的空白空间中。但是复杂的地质及工程不确定性导致了co2驱油与埋存的潜力模糊不清。必须开发有效的方法来准确预测co2驱的生产动态并对co2-eor开发政策(井位及井控参数)进行高效优化,保证ccus-eor技术的实施。
2、在油藏气驱开发中,常用的生产动态预测方法主要包括解析模型法、产量递减曲线分析法、油藏数值模拟法。解析模型法依据流体渗流原理建立数学模型来预测油井产能。该方法考虑的因素过于理想化,同时假设条件较多,难以准确描述强非均质油藏复杂的渗流过程,因此预测准确率不佳。产量递减曲线分析法是通过数学模型对生产数据进行拟合的一种方法,这种方法虽然简单易行,但是只能对稳定生产条件下的产量进行预测,且没有考虑油井生产动态的影响,预测结果往往与实际产量相差较大。油藏数值模拟法可以将复杂的油气地下渗流过程复现出来,但是预测的准确性过度依赖于精细的地质描述和高质量的历史拟合,从而使得模拟成本较高,大规模的预测任务无法开展。近年来,人工智能技术在油藏生产动态预测方面的应用越来越广泛。各种机器学习、深度学习方法可以从复杂的历史数据中分析出潜在的生产动态规律。甚至有些方法可以考虑影响油藏的时间、空间等多维度信息来实现生产动态的精准预测。但还是要针对不同的地质条件及应用场景选择合适的方法才能保证计算资源利用最大化。在油藏生产优化方面,传统方法主要通过数值模拟方法进行生产方案对比,从而优选累计产油量最大的方案作为推荐方案。这种方法不是真正意义上的优化,只是可选方案内部的优选。此外,传统优化方法仅针对ccus-eor全流程进行单次静态优化,整个过程中都在使用一成不变的井控参数,这是不符合油田现场要求的。
3、综上所述,传统的优化工作流无法同时协调井位和井控参数对于ccus-eor效果的影响,且无法综合考虑高维油藏信息及生产动态特征,本发明通过耦合时空图神经网络与多目标粒子群算法,提出了一种深度学习代理辅助的ccus-eor井位及井控参数优化方法,在延缓co2气窜现象发生的前提下,实现累计产油量及co2埋存量的多目标协同优化。
技术实现思路
1、为了解决上述问题,本发明提出了一种基于时空图神经网络的井位及井控参数优化方法,耦合了时空图神经网络与多目标粒子群算法,在延缓co2气窜现象发生的前提下,实现了累计产油量及co2埋存量的多目标协同优化。
2、本发明的技术方案如下:
3、一种基于时空图神经网络的井位及井控参数优化方法,包括如下步骤:
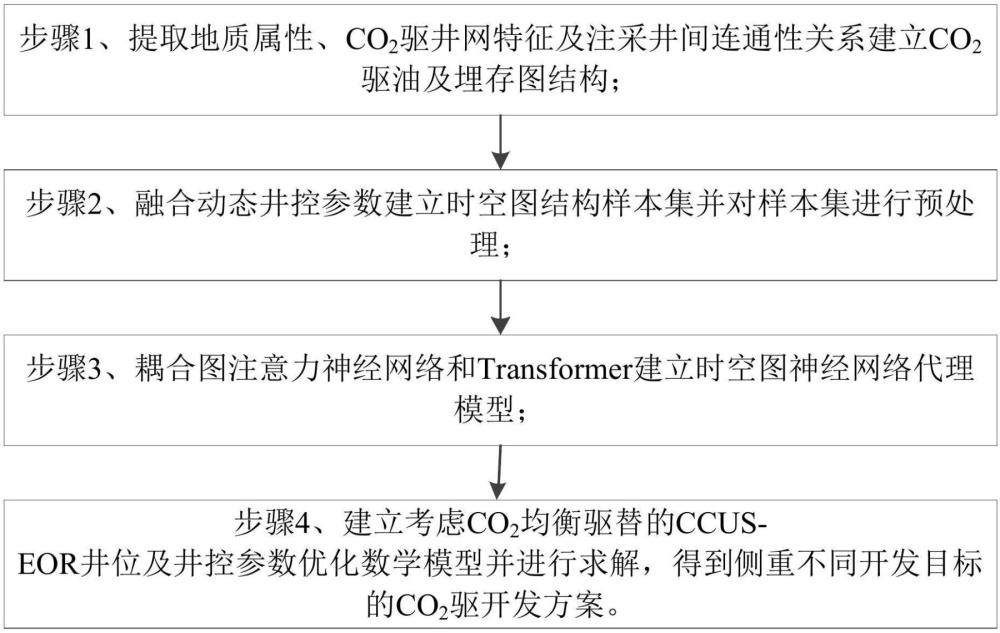
4、步骤1、提取地质属性、co2驱井网特征及注采井间连通性关系建立co2驱油及埋存图结构;
5、步骤2、融合动态井控参数建立时空图结构样本集并对样本集进行预处理;
6、步骤3、耦合图注意力神经网络和transformer建立时空图神经网络代理模型;
7、步骤4、建立考虑co2均衡驱替的ccus-eor井位及井控参数优化数学模型并进行求解,得到侧重不同开发目标的co2驱开发方案。
8、进一步地,所述步骤1中,将井视为图结构的节点,两口井之间是否存在连接关系视为边,注采井间的连通性强弱视为边的权重;注采井间的连通性采用如下公式定量:
9、(1);
10、式中,是注气井i1和生产井p1之间的co2驱连通性系数;是井间平均渗透率;为井间平均含油饱和度;是在井间平均含油饱和度下油相的相对渗透率;是在井间平均含油饱和度下气相的相对渗透率;和分别为油相和气相的黏度;是储层厚度;是井距;是生产井索引序号,为单个井组内的生产井总数。
11、进一步地,所述步骤2中,样本集的输入数据包括由动态井控参数组成的节点特征矩阵、由co2驱连通性系数组成的邻接矩阵;输出数据包括不同时间步下的累计产油量、co2埋存量及co2驱前缘分布;
12、对输入数据进行预处理,将每口井的井控数据依据min-max归一化方法放缩至区间[0,1],公式如下:
13、(2);
14、式中,是归一化后的值;是原始值;和分别为在样本集中的最大值和最小值。
15、进一步地,所述步骤3中,时空图神经网络代理模型包括空间信息分析模块、时序信息分析模块;空间信息分析模块通过图注意力神经网络来对输入的图结构数据进行空间特征的提取;时序信息分析模块首先通过transformer分析图注意力神经网络输出数据内部的时间依赖性,然后通过全连接层的配合来输出时间序列,即输出不同时间步下的累计产油量、co2埋存量及co2驱前缘分布;transformer是一个利用注意力机制来提高模型训练速度的模型,由编码器和解码器组成,而编码器由多个重复的编码层组成,每个编码层都包含了自注意力机制和前馈神经网络。
16、进一步地,所述步骤3中,时空图神经网络代理模型的工作过程如下:
17、步骤3.1、样本集经过两层堆叠的图注意力层来捕捉co2驱井网中复杂的空间关系,并输出为节点表示;
18、一个图注意力层的计算过程如下:
19、首先,对输入的节点特征和邻接矩阵进行线性变化,得到节点特征表示,公式如下:
20、(3);
21、式中,是第次迭代时节点的表示;是节点的特征矩阵;是第次迭代时的权重矩阵;
22、随后,计算每个节点的注意力权重,公式如下:
23、(4);
24、(5);
25、式中,是表征节点对于节点的贡献的过渡参数;是学习到的注意力参数向量,为转置符号;是激活函数;表示向量的拼接;为权重矩阵;是第次迭代时节点的表示;是第次迭代时的注意力权重;是节点的索引序号;是节点的集合;是以e为底的指数函数;是表征节点对于节点的贡献的过渡参数;
26、最后,使用第次迭代时的注意力权重对邻居节点的表示进行加权聚合,得到每个节点的更新表示,计算公式如下:
27、(6);
28、式中,是第次迭代时节点的表示;是激活函数;
29、按照上述过程得到两个图注意力层的计算结果,将两个计算结果通过flatten层汇总为一维的全局特征表示;
30、步骤3.2、将图注意力神经网络的输入数据通过transformer来分析图注意力神经网络输出数据内部的时间依赖性;
31、在transformer的自注意力机制部分,每个位置的表示都依赖于序列中的其他位置;transformer引入了多个注意力头,每个注意力头的注意力权重计算如下:
32、(7);
33、式中,是第个注意力头的注意力权重;是注意力函数;、、分别是通过权重矩阵投影得到的查询、键、值的矩阵;是softmax激活函数;是注意力头的维度;
34、多头注意力的输出是各个注意力头的拼接,如下:
35、(8);
36、式中,是多头注意力函数;是拼接函数;是多头注意力的投影权重矩阵;
37、在transformer的前馈神经网络部分,经过自注意力机制处理后,每个位置的表示会经过一个前馈神经网络层,增加模型的非线性表达能力;最终通过输出层得到不同维度的输出数据,即不同时间步下的累计产油量、co2埋存量及co2驱前缘分布。
38、进一步地,所述步骤4的具体过程为:
39、步骤4.1、建立考虑co2均衡驱替的ccus-eor井位及井控参数优化数学模型,优化数学模型包含三个因素,分别为目标函数、决策变量以及约束条件;
40、步骤4.2、基于多目标粒子群算法求解ccus-eor井位及井控参数优化数学模型,优选出累计产油量与co2埋存量多目标优化的pareto前沿,得到侧重不同开发目标的co2驱开发方案。
41、进一步地,所述步骤4.1的具体过程为:
42、步骤4.1.1、构建目标函数,如下:
43、(9);
44、式中,fopt为累计产油量;fgst为co2埋存量;是第口生产井的日产液量;是油井含水率;是第口注气井的日注气量;是第口生产井的日产气量;
45、步骤4.1.2、构建决策变量,如下:
46、(10);
47、(11);
48、(12);
49、(13);
50、式中,和分别是每口井的井位横坐标集合和纵坐标集合;是每口注气井的日注气量集合;是每口生产井的井底流压集合;是第口井的井位横坐标,为生产井和注气井的总数;是第口井的井位纵坐标;是第口生产井的井底流压;
51、步骤4.1.3、构建约束条件;约束条件分为两个方面,第一个是针对井位坐标的约束,如下:
52、(14);
53、式中,、分别为井a、井b的井位横坐标;和分别为井a、井b的井位纵坐标;是规定的两口井之间的最小井距;
54、第二个是针对井控参数的约束,如下:
55、(15);
56、(16);
57、式中,是某一井组内第口生产井与注气井之间的井间气驱扩散程度系数;为生产井索引序号,是某一井组内第口生产井与注气井之间的井间气驱扩散程度系数;是第口生产井co2驱前缘与注气井之间的欧几里得距离;是注气井与第口生产井的井距;是第口生产井与注气井之间的相对气驱扩散程度。
58、进一步地,所述步骤4.2的具体过程为:
59、步骤4.2.1、设置粒子群大小为,在约束条件下随机生成注气井和生产井的井位坐标、注气井日注气量和生产井井底流压,构建初始种群并初始化粒子的位置和速度,同步计算每个粒子的适应度值;
60、步骤4.2.2、对于每个粒子,根据其当前位置和历史位置更新个体最优解,进一步根据所有粒子的更新全局最优解;第个粒子在次迭代时的速度和位置的更新公式为:
61、(17);
62、(18);
63、式中,为迭代次数;为惯性权重;为第个粒子在次迭代时的速度;和为不同的加速度系数,分别用来调节个体最优位置和领域最优位置的经验在速度更新中的比例;和均为[0,1]范围内服从均匀分布的随机数;为第个粒子在次迭代时的位置;
64、步骤4.2.3、对于种群中的每个粒子,计算其被支配的个数和支配的解的集合,并初始化非支配排序等级;执行快速非支配排序操作,将的个体放入集合f1中,以此类推到种群等级被全部划分,所得到的pareto最优解集为f1;pareto最优解集即为侧重不同开发目标的co2驱开发方案,pareto最优解集包含pareto前沿及每个解集的注气井和生产井的井位坐标、动态的注气井日注气量、动态的生产井井底流压,还包括每个解集对应的不同时间步下累计产油量、co2埋存量。
65、本发明所带来的有益技术效果:本发明建立的时空图神经网络代理模型可通过空间信息和时序信息分析模块来对考虑地质及工程不确定性的多维特征进行精准提取,从而对不同时间步及工程参数组合对应的累计产油量、co2埋存量及co2驱前缘分布进行快速响应,实现co2驱油与埋存动态的时空序列预测;本发明建立的基于深度学习代理辅助的ccus-eor井位及井控参数优化方法,通过融合深度学习组合模型与多目标优化算法,使得训练完成的代理模型可取代基于全物理背景的模拟器来提高优化效率,解决了ccus-eor井位及井控参数的协同优化问题,可以保证在抑制气窜的情况下,实现产油量和co2埋存量的最大化,为ccus-eor技术的最优化设计提供指导,对油藏开发与管理有积极意义。
- 还没有人留言评论。精彩留言会获得点赞!