一种基于行星式旋转机械的故障诊断方法、系统及设备
本发明涉及故障诊断,具体涉及一种基于行星式旋转机械的故障诊断方法、系统及设备。
背景技术:
1、行星式旋转机械作为现代化工业设备中的重要零部件,在工业生产中发挥着至关重要的作用,然而,由于行星式旋转机械长期运行并受环境和载荷等因素的影响,在运行过程中将不可避免地发生故障,一旦发生故障,将会直接影响设备的安全可靠运行,造成不可估量的经济损失甚至发生人员伤亡,因此,研究行星式旋转机械的故障诊断,及时发现并解决故障显得尤为重要。同时,智能机械装备的发展对装备与故障诊断系统的集成提出了要求,通过在行星式旋转机械上内置传感器和实时数据分析系统,可以实时监控行星式旋转机械的运行故障类型,然而,有限的内部空间限制了数据分析系统的体积,为了在体积和资源受限的数据分析系统上部署故障诊断模型,降低存储和计算成本,实现智能机械装备与故障诊断系统的集成,开发一种轻量化故障诊断方法显得尤为重要。
2、目前,有多种针对旋转机械的轻量化故障诊断方法,有部分轻量化故障诊断方法采用剪枝的技术实现模型的轻量化,有部分故障诊断方法使用属性离散化降低了计算量,还有的故障诊断方法提出了一种参数量更少的小波驱动的深度神经网络,该方法设计了一种连续小波卷积层用来替代标准卷积神经网络的第一层,实现旋转机械的故障诊断,然而,不论哪种方法均只从神经网络模型方面考虑轻量化,并未结合旋转机械的结构特点,所以构建故障诊断模型时脱离了旋转机械的物理特性,可解释性差。
3、因此,需要提供一种基于行星式旋转机械的故障诊断方法、系统及设备以解决上述问题。
技术实现思路
1、本发明提供一种基于行星式旋转机械的故障诊断方法、系统及设备,以解决现有的技术只从神经网络模型方面考虑轻量化,并未结合旋转机械的结构特点,所以构建故障诊断模型时脱离了旋转机械的物理特性,可解释性差的问题。
2、本发明的一种基于行星式旋转机械的故障诊断方法采用如下技术方案,该技术方案包括:
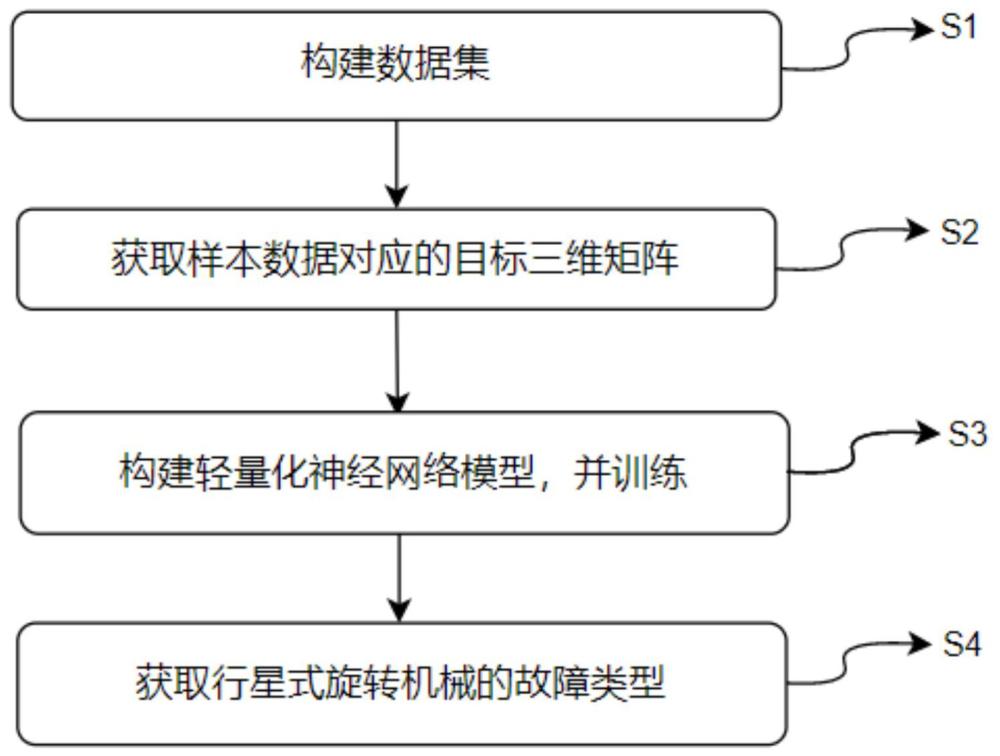
3、将行星式旋转机械的滚动体公转一周时采集的振动信号数据点作为一个样本数据,获取每个样本数据对应的行星式旋转机械的故障类型,将每个样本数据以及其对应的行星式旋转机械的故障类型作为数据集;
4、基于行星式旋转机械中滚动体的数量,以及滚动体公转至相邻滚动体的位置时相邻两个滚动体的振动信号数据点的数量,获取每个样本数据对应的通道数为1的三维矩阵;
5、对振动信号对应的三维矩阵中的每行数据进行快速傅里叶变换,并对变换结果取绝对值得到每个样本数据对应的目标三维矩阵;
6、构建轻量化神经网络模型,将每个样本数据对应的目标三维矩阵作为输入,样本数据对应的行星式旋转机械的故障类型作为输出,对神经网络模型进行训练;构建轻量化神经网络模型的步骤为:构建通道共享-空间单向卷积层;通道共享-空间单向卷积层运算时,在通道层面:输入的目标三维矩阵的所有通道共用一组卷积核;在空间层面:输入的目标三维矩阵的每行共用一个卷积核,且每列的卷积核不同;将resnet18为主干网络的卷积层替换为通道共享-空间单向卷积层,并增加多个输出通道数不同,且卷积核尺寸为1的卷积层,得到目标主干网络;根据目标主干网络得到轻量化神经网络模型;
7、将当前样本数据对应的目标三维矩阵,输入训练好的轻量化神经网络模型,得到当前样本数据对应的行星式旋转机械的故障类型。
8、优选地,获取滚动体公转至相邻滚动体的位置时相邻两个滚动体的振动信号数据点的数量的步骤为:
9、根据滚动体的公转直径、滚动体的直径、内滚道转速,获取滚动体的公转速度;
10、根据滚动体的公转速度以及振动信号的采样频率,获取滚动体公转一周时采集的振动信号数据点的数量;
11、根据滚动体公转一周时采集的振动信号数据点的数量以及行星式旋转机械中滚动体的数量,获取滚动体公转至相邻滚动体的位置时相邻两个滚动体的振动信号数据点的数量。
12、优选地,滚动体的公转速度的表达式为:
13、
14、式中,表示滚动体的公转速度;
15、表示滚动体的公转直径;
16、表示滚动体的直径;
17、表示内滚道转速。
18、优选地,滚动体公转一周时采集的振动信号数据点的数量的表达式为:
19、
20、式中,表示滚动体公转一周时采集的振动信号数据点的数量;
21、表示振动信号的采样频率;
22、表示滚动体的公转速度。
23、优选地,滚动体公转至相邻滚动体的位置时相邻两个滚动体的振动信号数据点的数量的表达式为:
24、
25、式中,表示滚动体公转至相邻滚动体的位置时相邻两个滚动体的振动信号数据点的数量;
26、表示滚动体公转一周时采集的振动信号数据点的数量;
27、表示行星式旋转机械中滚动体的数量。
28、优选地,获取每个样本数据对应的通道数为1的三维矩阵的步骤为:
29、取 l个振动信号数据点作为一个样本数据,并表示为 × ×1的三维矩阵。
30、优选地,获取每个样本数据对应的目标三维矩阵的步骤为:
31、取快速傅里叶变换后的频谱中非负频率对应的幅度和相位进行变换,并计算变换后的绝对值;根据变换后的绝对值得到目标三维矩阵。
32、一种基于行星式旋转机械的故障诊断系统,包括:
33、数据采集模块,用于将行星式旋转机械的滚动体公转一周时采集的振动信号数据点作为一个样本数据,获取每个样本数据对应的行星式旋转机械的故障类型;
34、数据处理模块,用于基于行星式旋转机械中滚动体的数量,以及滚动体公转至相邻滚动体的位置时相邻两个滚动体的振动信号数据点的数量,获取每个样本数据对应的通道数为1的三维矩阵;对振动信号对应的三维矩阵中的每行数据进行快速傅里叶变换,并对变换结果取绝对值得到每个样本数据对应的目标三维矩阵;
35、构建神经网络模块,用于构建轻量化神经网络模型,将每个样本数据对应的目标三维矩阵作为输入,样本数据对应的行星式旋转机械的故障类型作为输出,对神经网络模型进行训练;构建轻量化神经网络模型的步骤为:构建通道共享-空间单向卷积层;通道共享-空间单向卷积层运算时,在通道层面:输入的目标三维矩阵的所有通道共用一组卷积核;在空间层面:输入的目标三维矩阵的每行共用一个卷积核,且每列的卷积核不同;将resnet18为主干网络的卷积层替换为通道共享-空间单向卷积层,并增加多个输出通道数不同,且卷积核尺寸为1的卷积层,得到目标主干网络;根据目标主干网络得到轻量化神经网络模型;
36、故障类型判断模块,用于将当前样本数据对应的目标三维矩阵,输入训练好的轻量化神经网络模型,得到当前样本数据对应的行星式旋转机械的故障类型。
37、本发明公开了一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现本发明公开的一种基于行星式旋转机械的故障诊断方法的步骤。
38、本发明的有益效果是:
39、本发明结合行星式旋转机械的结构特点对振动数据进行处理,并结合处理以后的数据特点构建参数量少的通道共享-空间单向卷积层,然后通过将resnet18中的卷积层替换为通道共享-空间单向卷积层,最终得到一个基于行星式旋转机械特点的轻量化神经网络模型,利用轻量化神经网络模型即可获取行星式旋转机械的故障类型,即本发明的方法结合了行星式旋转机械的结构特点,从神经网络模型方面考虑轻量化,从而以更低的存储和计算成本实现更好的故障诊断性能,有利于在体积和资源受限的数据分析系统上部署故障诊断模型,实现机械装备与故障诊断系统的集成,促进智能机械装备的发展。
40、其次,通道共享-空间单向卷积层具有较强的拓展性,可应用于各任务的神经网络框架中以减少参数量。
- 还没有人留言评论。精彩留言会获得点赞!