一种嵌入物理特性与常识的目标确认方法
本发明涉及数字图像处理,更具体的说是涉及一种嵌入物理特性与常识的目标确认方法。
背景技术:
1、可信研究是指通过解释神经网络模型模型的预测结果,协助分析人工智能模型的工作机理,并进一步提升模型的最终性能表现和鲁棒性。而知识是人类感知和理解世界的一种基本能力,同时当前深度神经网络缺乏像人一样对普遍事物的认知,因此将知识融入神经网络预测的结果中可以有效提高神经网络模型结果的可信度。
2、目前,在图像识别与目标检测领域,国外已经存在部分基于常识推理增强模型可信性的方法:facebook人工智能研究团队的david lopez-paz首次尝试提取需要识别目标的部分属性信息,用于辅助需要识别的图像内容;来自伊利诺伊大学的李博研究团队不仅仅对图片的类别直接进行检测,同时也对颜色、文本信息、形状等属性进行感知,从而获取目标在不同层面的属性信息,并对这些模型检测出的信息使用基于因果推理的方法对结果进行推理校验,最终调整目标的置信度。在推荐系统方面,可解释的推荐系统通常以特征、用户和物品作为解释的参考依据,基于其中的细粒度特征对推荐结果进行解释,从中找出最适合用于解释的特征。
3、但是,如何生成可解释性结果以及确保模型结果的可信是一个非常复杂的过程,目前依然存在很多的挑战。
4、因此,如何提供一种具有较小计算量、较高精度的目标确认方法,从而在硬件条件较低的环境下解决神经网络检测模型的可信应用问题,是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种嵌入物理特性与常识的目标确认方法以解决背景技术中提到的部分技术问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种嵌入物理特性与常识的目标确认方法,包括以下步骤:
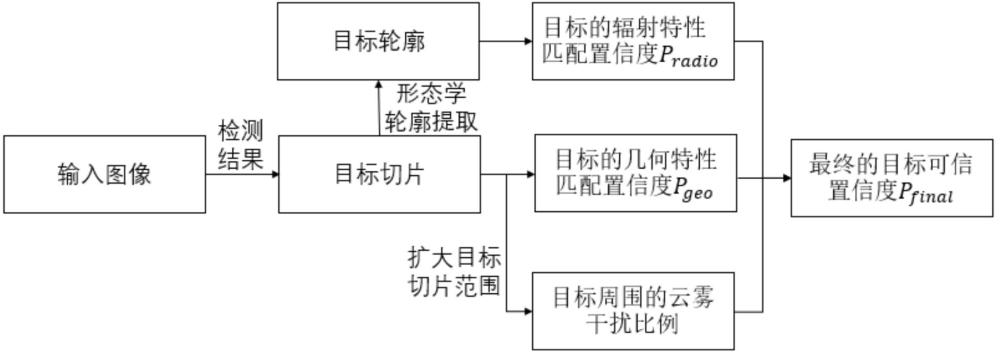
4、s1.通过目标检测器获取检测目标的目标框,将目标框扩大并提取目标切片,对目标切片内的目标进行轮廓提取并对轮廓内部进行形态学填充,获得目标的二值化切片;
5、s2.根据目标的二值化切片,计算目标的长宽比例可信度和形状匹配可信度,并综合计算目标的几何特性匹配置信度;
6、s3.根据目标的二值化切片,利用红外目标的辐射特性计算目标的辐射特性置信度;
7、s4.基于检测目标的目标框,对目标周围进行较大范围和较小范围的切片提取,再利用自适应阈值分割操作精确的感知目标周围的云雾干扰比例;
8、s5、根据目标的几何特性置信度、目标的辐射特性置信度以及云雾干扰比例,计算得到最终的目标可信置信度。
9、优选的,步骤s1的具体内容包括:
10、s11.根据目标检测器的检测结果,扩大目标框,并且当目标在图像边缘时以图像的边界为准,然后将目标从原始图像中剪裁出来得到目标切片;
11、s12.通过阈值将目标切片分为前景与背景,并利用最大类间方差法优化求解目标函数得到阈值,获得阈值分割图像,利用canny边缘检测算法处理阈值分割图像得到目标可能的边缘,利用轮廓提取算法寻找最大切片图像中最大闭合路径轮廓,获得完整且封闭的目标轮廓,并进行二值化填充;
12、s13、对于步骤s12中提取的目标轮廓,利用最小外接矩的角度偏移进行仿射变换操作,从而将目标轮廓旋转至水平,并获得目标的二值化切片。
13、优选的,步骤s12中求解的目标函数为:
14、
15、其中,
16、
17、
18、
19、
20、
21、其中,w0为前景的像素点数占整幅图像像素的比例,w1为背景的像素点数占整幅图像的比例,μ为总灰度,μ0为前景的平均灰度,μ1背景的平均灰度,n0为前景的像素点数,n1为背景的像素点数,m×n为目标切片整幅图像像素大小。
22、优选的,步骤s2的具体内容为:
23、根据目标轮廓计算目标的长宽比,根据长宽比是否满足可信范围得到目标的长宽比例可信度plen;
24、对目标轮廓边缘进行点采样,构造目标轮廓的特征描述子并与已知的目标轮廓进行形状匹配,根据是否匹配成功得到形状匹配可信度pmatch;
25、最终的目标几何特性匹配置信度为pgeo=pmatch+plen。
26、优选的,步骤s3的具体内容为:
27、s31、将目标的二值化切片上所代表的图像区域表示为r,利用放射变化将灰度图r横向放置为r´,横方向像素长度大于纵方向像素长度;
28、s32、采样得到各个部分热分布情况,具体为:
29、
30、
31、
32、其中,r´横坐标为i,纵坐标为j,rkj为目标在(k,j)位置上的灰度值,h、n分别为横方向像素长度、纵方向像素长度,r1、r2、r3表示当前区域的灰度分布均值;
33、s33、依据目标的形状特点制定目标辐射特性可信置信度准则,并根据得到的各个部分热分布情况,得到目标的辐射特性置信度pradio。
34、优选的,步骤s4的具体内容为:
35、s41.对通过目标检测器获取的检测目标的目标框,以目标框最长的边向外拓展正方形区域并进行切片处理;
36、s42.分别在横纵两个方向上进行每点梯度的计算,对切片结果进行基于梯度的阈值分割操作,利用sobel算子提取边缘梯度信息;
37、s43.利用直方图均匀化,对获取的梯度进行对比度增强,基于计算得到的边缘梯度寻找切片内所有的闭合轮廓所围成的子区域s1,即为云雾scloud1;
38、s44.进行二次感知判断,根据预测出来的检测框结果,以检测框为中心,最长边加10%像素的最大外接正方形进行切片范围较小的第二次切片处理,在小切片范围内获得基于边缘梯度的闭合轮廓内区域集合s2,并获取云雾scloud2;
39、s45.利用获取的scloud1来辅助判别scloud2为云雾还是背景,并获取最终的scloud2云雾比例。
40、优选的,步骤s42中横纵两个方向上进行每点梯度计算的具体公式为:
41、
42、
43、其中,i1为切片图像,*为卷积操作;
44、边缘梯度信息具体计算公式为:
45、;
46、步骤s43中闭合轮廓所围成的子区域s1为:
47、
48、其中,s1为分割得到的闭合轮廓内区域集合,为闭合轮廓内区域计算函数,g为计算得到的边缘梯度图;
49、步骤s45中最终的scloud2云雾比例为:
50、
51、
52、其中,i2为第二次切片处理后的图像。
53、优选的,步骤s5的具体内容为:
54、根据scloud1和scloud2分别计算目标环境周围含云量概率值pcloud1和pcloud2;
55、最终的目标可信置信度具体为;
56、
57、其中,pcloud1为目标环境周围含云量概率,pbox为目标与检测框的重合程度,ppred为检测模块原始置信度,pcloud2为提取目标含云量概率,pgeo为目标几何特性匹配置信度,pradio为目标热辐射特性匹配置信度。
58、一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现所述的一种嵌入物理特性与常识的目标确认方法。
59、一种处理终端,包括存储器和处理器,存储器中存储有可在处理器上运行的计算机程序,处理器执行计算机程序时实现所述的一种嵌入物理特性与常识的目标确认方法。
60、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种嵌入物理特性与常识的目标确认方法,利用目标自身具备的物理特性与常识,在检测框内利用自适应的目标形态学填充方法将目标与背景分割,在综合利用目标的几何特性和辐射特性来对目标进行确认,速度快,精度高,有效减少目标检测模型产生的大量虚警,有助于提高神经网络模型结果的可靠性,在硬件条件较低的环境下解决神经网络检测模型的可信应用问题。
- 还没有人留言评论。精彩留言会获得点赞!