一种用于激光雷达点云的平面块分割方法及其应用与流程
本发明涉及激光雷达,具体涉及一种用于激光雷达点云的平面块分割方法。
背景技术:
1、由激光雷达获取的三维点云数据包含目标区域三维信息,已经被广泛应用在多个领域。点云数据有无序、无结构、本身包含噪声的特点,这些特点使得点云数据的处理具有挑战。
2、在点云中检测与分割平面是无人驾驶、机器人导航、建筑物三维重建等新型领域的关键技术之一。目前平面分割算法已相对成熟,在足够的迭代次数后通常能得到准确的分割结果。在平面内检测得到的平面是否包含指定大小和形状区域,可用于无人机停靠点自动寻找、物体放置可行性判别等领域。然而该领域的研究较少,仍处于一个起步且待开放的阶段。对于指定大小点云平面块的分割,模板匹配是常用算法,但是对于稀疏且高程误差较大的点云,模板难以使用。另一种平面块分割方法是基于计算凸包的面积进行的,然而这种方法无法解决点云中间存在大比例凹陷的极端情况。
技术实现思路
1、本发明克服了现有技术的不足,提供了一种用于激光雷达点云的平面块分割方法,能针对性解决单波长激光雷达数据的稀疏点云数据平面块分割问题,可处理高程误差大、噪声严重的较差数据情况。
2、为达到上述目的,本发明采用的技术方案为:一种用于激光雷达点云的平面块分割方法,包括以下步骤:
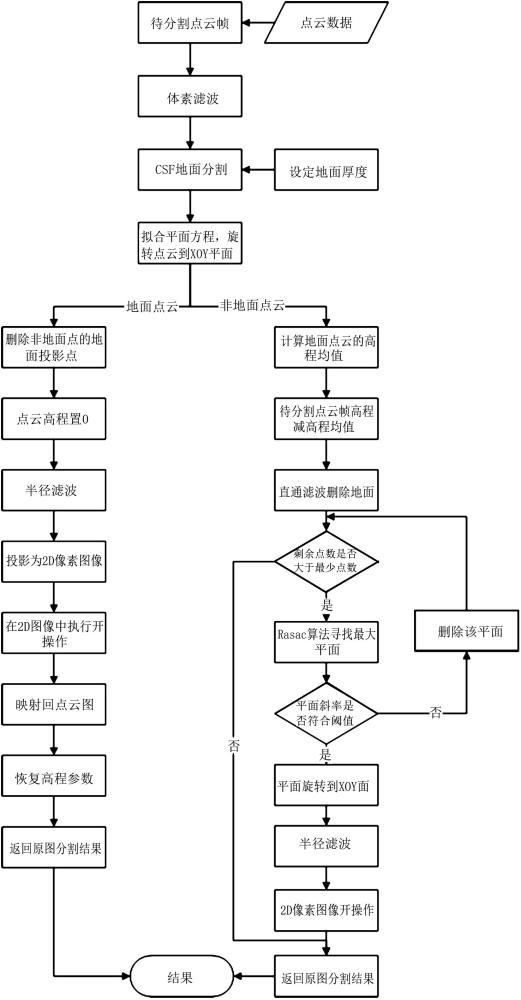
3、步骤a.获取原始点云帧,并对原始点云帧进行预处理得到处理后的地面点云和非地面点云,所述预处理包括对所述原始点云帧进行体素滤波减少噪声、拟合地面的平面方程、点云旋转;
4、所述体素滤波减少噪声包括以下步骤:
5、步骤a.1,获取原始点云的原始点云数据f,对原始点云数据f执行半径为r1的体素滤波器去除离散点和显著噪声,获得处理后的处理数据f';
6、所述拟合地面的平面方程包括以下步骤:
7、步骤a.2,基于处理数据f',使用布料拟合算法进行地面分割,并拟合地面点云的平面方程;
8、步骤a.3,参照雷达成像质量和导航系统高程误差,设定地面厚度为δ米;
9、所述点云旋转包括以下步骤:
10、步骤a.4,基于拟合的平面方程,将处理数据f'旋转至xoy平面;
11、步骤a.5,基于所述地面厚度和所述平面方程分割点云为地面点云和非地面点云;
12、步骤b.分割所述地面点云的指定大小平面块,或/和,分割所述非地面点云的指定大小平面块。
13、具体的,所述xoy平面为将站心坐标系设定为参考坐标系,雷达中心为原点o,xyz坐标轴分别指向o的东北天方向,北为地理北极。
14、本发明一个优选的实施方案中,布料拟合算法中包括公式:;式中,x(t)是布料中的粒子在t时刻的位置;m是布料中粒子的质量;是布料受到的外部驱动因素,表示布料中粒子x在t时刻受到f_ext作用的结果;是布料内部驱动因素,表示布料中粒子x在t时刻受到f_int作用的结果。
15、本发明一个优选的实施方案中,
16、分割所述地面点云的指定大小平面块包括以下步骤:
17、步骤b.1.1,在分割出的所述地面点云中删去非地面点云在地面上的垂直投影点及其附近点获取更新的地面点云;
18、步骤b.1.2,将步骤b.1.1中得到的更新的地面点云的高程置0,并进行半径滤波减少点数;
19、步骤b.1.3,将步骤b.1.2滤波后的点云投影到2d像素图像获取像素图像;
20、步骤b.1.4,为步骤b.1.3中得到的像素图像加边框,分割平面块大的是r,小的为w*h,长为w,高为h,则纵向边框左右各增加w/2,横向边框上下各增加h/2;
21、步骤b.1.5,对步骤b.1.4中尺寸扩充后的图像执行开操作,按需要的分割平面块大小w*h设定滤波器的滤波规格为w*h;
22、步骤b.1.6,将经过步骤b.1.5处理后二维图像映射回点云,得到地面平面块分割结果;
23、步骤b.1.7,对步骤b.1.6得到的地面平面块分割结果恢复地面平面块分割结果点云的高程数值,映射回原始点云数据f,并将f中结果点附近的点云设为最终分割结果。
24、本发明一个优选的实施方案中,将滤波后点云投影到2d像素图像包括以下步骤;
25、步骤b.1.3.1,获取平面点云数据的外接矩形边界,所述外接矩形边界的4个顶点坐标如下:[[xmin,ymin ], [xmax,ymin], [xmax, ymax], [xmin, ymax]];其中xmin和ymin分别代表当前平面内所有点的最小x轴坐标值和最小y轴坐标值,xmax和ymax分别代表当前平面内所有点的最大x轴坐标值和最大y轴坐标值;
26、步骤b.1.3.2,绘制对应的网格矩阵,所述网格矩阵的绘制方法包括:将有点的网格赋值为1,将无点的网格赋值为0,网格大小计算如下:xmun=xmax-xmin;ymun=ymax-ymin;其中xmun与ymun分别代表网格矩阵横向和纵向的网格个数。其中,赋值的1代表其灰度值为225;赋值的0代表其灰度值为0。
27、步骤b.1.3.3,基于步骤b.1.3.2中绘制的所述网格矩阵绘制二值像素图像,所述二值像素图像的图像分辨率为xmun*ymun。
28、本发明一个优选的实施方案中,将处理后二维图像映射回点云,得到地面平面块分割结果包括以下步骤:
29、步骤b.1.6.1,基于平面块分割结果计算经过步骤b.1.5处理后二维图像中每个赋值为1的连通域的最大的外接矩形。具体的,图3中的虚线即为该外接矩形。其中,赋值的1代表其灰度值为225。
30、步骤b.1.6.2,基于步骤b.1.6.1中的所述外接矩形,将点云平面内在矩形内的点设为分割平面块的结果点。
31、本发明一个优选的实施方案中,分割所述非地面点云的指定大小平面块包括以下步骤:
32、步骤b.2.1,基于步骤b.1.2步骤得到的地面点云,计算地面的高程均值为z-mean。
33、步骤b.2.2,点云的所述处理数据f'中每个点的高程减去z-mean,得到f'_z。
34、步骤b.2.3,利用直通滤波处理步骤b.2.2获得所述f'_z,并删除地面点云。
35、具体的,直通滤波可根据指定轴向的阈值范围,将点云中落在这个范围之外的点删除。
36、步骤b.2.4,利用随机样本一致算法找到非地面点云中的最大平面。
37、具体的,最大迭代次数和平面包含最少点数的参数设定应参考应用场景中运算效率要求和点云密度进行适配。在本发明的应用场景中,考虑实时性的要求以及稀疏点云的特点,设定迭代次数为1000次,平面内最少点数设定为4,按照此参数设定,随机样本一致算法将在非地面点云中迭代计算最多1000个平面,且每个平面中最少有4个点,之后选定包含点数最多的平面作为找到的最大平面。在本发明的应用场景中,系数点云设定迭代次数num_iterations=1000,平面内最少点数设定为ransac_n=4。
38、步骤b.2.5,基于随机样本一致算法寻找到的当前最大平面,计算所述当前最大平面的法向量相对所述xoy平面的斜率;所述斜率在阈值内则进行下一步,否则在非地面点云中删除所述当前最大平面后继续寻找最大平面。
39、步骤b.2.6,将步骤b.2.5最终找到的最大平面旋转到与所述xoy平面平行。
40、步骤b.2.7,对于指定大小平面块的查找步骤与步骤b.1.3至步骤b.1.7步骤相同。
41、步骤b.2.8,保留分割结果,在当前非地面点云中删除当前平面。
42、步骤b.2.9,重复步骤b.2.4至步骤b.2.8步骤,直到剩余的非地面点云r的点数小于阈值。
43、本发明一个优选的实施方案中,一种用于激光雷达点云的平面块分割方法,包括:步骤b.2.3,利用直通滤波处理f'_z,删除地面点云的步骤包括:将直通滤波器的z轴阈值范围设定为0-200米,直通滤波器将遍历每个点,判断其在z轴上的数值,即高程数值是否在阈值范围内,若在则保留,若不在则删除。最终直通滤波器过滤掉全部高程小于0的点,保留的点云即为全部非地面点。
44、或/和,步骤b.2.4,利用随机样本一致算法找到非地面点云中的最大平面的步骤包括:随机样本一致算法查找点云最大平面需要设定一个最大迭代次数和平面包含的最少点数,在本发明的应用场景中,系数点云设定迭代次数num_iterations=1000,平面内最少点数设定为ransac_n=4。
45、随机样本一致算法的每次迭代随机选取点云中的3个不共线点组成平面,
46、或/和,步骤b.2.5的平面方程求解下行列式得到:;其中为3个点的坐标;
47、得到平面方程后,计算点云中所有点到平面的距离;点到平面距离公式为:;其中,d为点到平面距离,平面方程为,a、b、c、d均为平面方程系数;为计算点到平面距离的当前点。
48、本发明一个优选的实施方案中,一种用于激光雷达点云的平面块分割设备,包括:
49、存储器;
50、处理器;
51、以及
52、计算机程序;
53、其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现所述的用于激光雷达点云的平面块分割方法。
54、本发明一个优选的实施方案中,一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的用于激光雷达点云的平面块分割方法。
55、本发明解决了技术背景中存在的缺陷,本发明有益的技术效果是:
56、本发明的一种用于激光雷达点云的平面块分割方法,能针对性解决单波长激光雷达数据的稀疏点云数据平面块分割问题,可处理高程误差大、噪声严重的较差数据情况。本发明通过判断分割得到的平面是否包含指定大小的平面块,可以处理已知的情况。
- 还没有人留言评论。精彩留言会获得点赞!