一种基于二维多视图重建钙质砂三维形态的方法及系统
本发明属于图像处理相关,更具体地,涉及一种基于二维多视图重建钙质砂三维形态的方法及系统。
背景技术:
1、钙质砂是经由珊瑚碎屑、贝壳等生物残骸就地沉积而成的粒状岩土材料,具有不同于大多数陆源砂如石英砂的独特力学行为特性。其中,钙质砂不规则的颗粒形态显著影响材料的宏观物理力学性能,如颗粒破碎,剪切强度,孔隙率等。并且目前流行的dem,fdem,cfd-dem等数值模拟方法中,经常需要导入颗粒的二维或三维轮廓信息。因此,获取钙质砂的颗粒形态是研究钙质砂物理力学性质的首要前提。二维形态的获取非常简便,常规的相机拍摄后经过图像处理即可得到颗粒形态的二维投影,专用设备如dynamic imageanalysis(dia)集成了拍照与图像处理基础,可以在几分钟的时间内完成几万个颗粒的二维形态分析。
2、实际上,基于二维图像分析得到的经典的形态参数如纵横比,圆度,凸度等严重依赖拍摄的角度,当颗粒形态非常复杂时(例如钙质砂主要由贝壳与生物残骸构成,其表面孔洞非常丰富,并且外轮廓及不规则),基于不同拍摄角度得到的二维颗粒图像得到的形态参数可能相差巨大。虽然可以通过大量数据统计尽可能减弱预测值的偏差,但依然无法从根本上消除这种差异性。因此获取三维形态依然是有必要的,在岩土工程领域常用的三维形态数据获取方法有电子计算机断层扫描技术(computed tomography,ct)、激光扫描、结构光扫描等。这些方法得到的三维形态信息精度很高,但是过程低效且昂贵。
3、因此,需要一种简单高效的进行钙质砂表面三维重建的方法。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于二维多视图重建钙质砂三维形态的方法及系统,解决钙质砂表面三维重建的问题。
2、为实现上述目的,按照本发明的一个方面,提供了一种基于二维多视图重建钙质砂三维形态的方法,该方法中包括下列步骤:
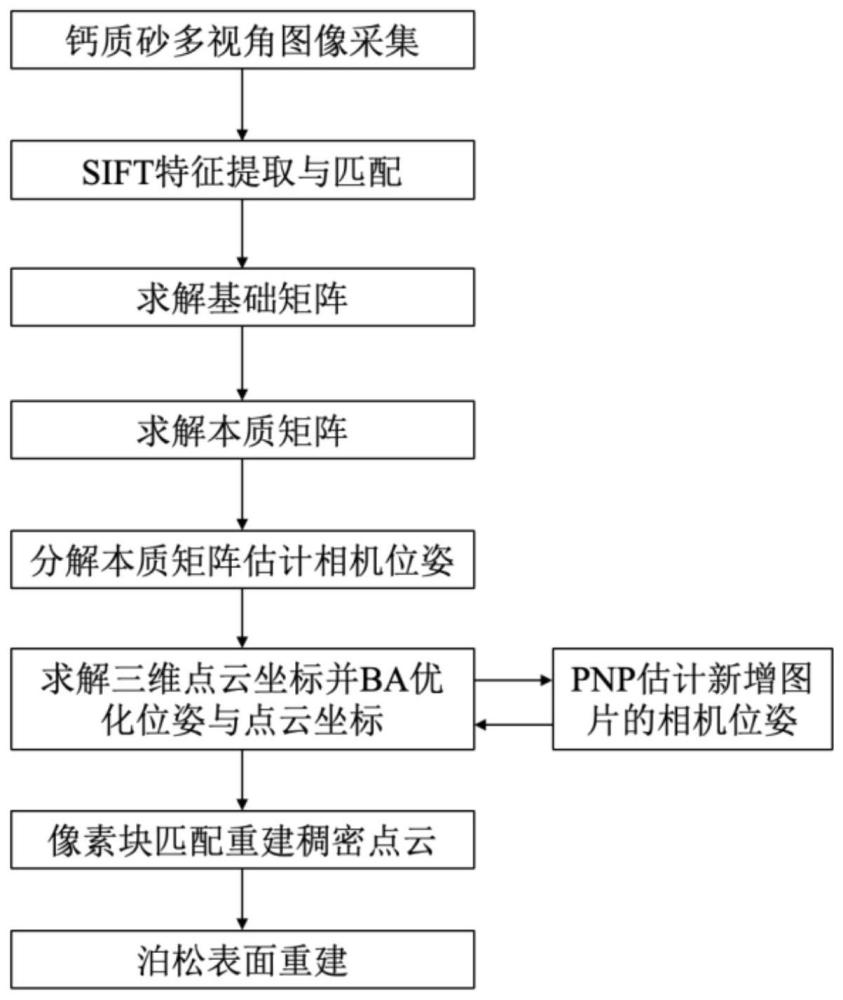
3、s1从多个视角采集待重建钙质砂的二维图像,提取每张二维图像中的特征点,将相邻视角的二维图中的所有特征点进行匹配获得多对特征匹配点;
4、s2对于两张相邻视角的二维图像pi和pi+1,计算采集该二维图像pi和pi+1相机的相对位姿,利用该相对位姿和二维图pi和pi+1中的每对特征匹配点计算获得每对特征匹配点在三维空间中对应的点的三维坐标,即获得每对特征匹配点在三维空间对应的空间点,i为正整数;
5、s3在所述图像pi和pi+1对应的所有空间点中选取至少三个所述空间点,并结合图像pi和pi+1的相对位姿,计算每个选取的所述空间点在二维图像pi+2中对应的特征匹配点,并以此确定采集所述二维图像pi+2相机的位姿;
6、s4 i=i+1,返回步骤s2,直至获得所有二维图像中特征匹配点在三维空间中对应的空间点坐标和所有相机的位姿;
7、s5调整所述待重建钙质砂的位置,重复步骤s1~s4,获得在调整后位置下所有空间点坐标,利用不同位置下待重建钙质砂的对应的空间点三维坐标进行三维表面重建,以此获得待重建钙质砂的三维形态。
8、进一步优选地,在步骤s2中,所述采集二维图像pi和pi+1相机的相对位姿按照下列步骤进行:
9、s21利用二维图像pi和pi+1中每对特征匹配点的几何位置关系,构建并求解空间点在不同二维图像像pi和pi+1中对应得投影点的坐标之间的转换关系,即基础矩阵;
10、s22结合相机的参数矩阵和所述基础矩阵构建不同相机的三维坐标系的转化关系,即本质矩阵;
11、s23分解所述本质矩阵获得相机的旋转矩阵和平移矩阵,利用该相机的旋转矩阵和平移矩阵求解获得所述采集二维图像pi和pi+1相机的相对位姿。
12、进一步优选地,在步骤s21中,所述基础矩阵按照下列关系式求解:
13、x′ifxi=0
14、其中,xi和xi'分别是空间点xi在两幅图像上的投影齐次坐标向量,f是基础矩阵。
15、进一步优选地,所述基础矩阵需要至少8个特征匹配点采用奇异值分解的线性最小二乘法求解。
16、进一步优选地,在步骤s22中,所述本质矩阵按照下列关系式求解:
17、e=ktfk
18、其中,e是本质矩阵,k是相机的参数矩阵,f是基础矩阵。
19、进一步优选地,在步骤s23中,所述分解所述本质矩阵获得相机的旋转矩阵和平移矩阵按照下列方式进行:
20、e=u∑vt
21、t=u(:,3)或t=-u(:,3)
22、r=uwvt或r=uwttvt
23、其中,r是相机的旋转矩阵,t是平移矩阵,假设e是一个m×n阶矩阵,u是m×m阶酉矩阵;σ是m×n阶非负实数对角矩阵;而vt,即v的共轭转置,是n×n阶酉矩阵,w是转换矩阵。
24、进一步优选地,在步骤s3中,所述求解获得的相机的旋转矩阵r和平移矩阵t采用下列关系式进行判定,满足下列关系式的为最终解:
25、r(3,:)(x-t)>0
26、其中,x是三维空间的点坐标。
27、进一步优选地,在步骤s3中,在获得二维图像pi+2中特征匹配点对应的空间点后,利用光束平差减小二维成像平面上的投影和二维图像中真实投影点之间的重投影误差,以此优化空间点的坐标和相机位姿。
28、进一步优选地,在步骤s5中,所述三维表面重建首先是对所有相邻的二维图像中的像素块进行对极几何匹配重建出三维点云,并融合重复或者冗余的点;然后将所述三维点云采用泊松表面重建算法转化为网格表示,以此重建出待重建钙质砂的三维形态。
29、按照本发明的另一个方面,提供了一种上述所述的方法进行钙质砂三维形态重建的系统,该系统包括图像采集模块、特征提取和匹配模块、相机位姿和空间点求解模块、三维重建模块,其中:
30、所述图像采集模块用于采集不同视角的待重建钙质砂的二维图像;
31、所述特征提取和匹配模块用于对相邻视角的二维图像进行特征点提取和匹配;
32、所述相机位姿和空间点求解模块用于利用特征匹配点求解相机位姿和空间点的三维坐标;
33、所述三维重建模块用于利用空间点的三维坐标进行三维重建。
34、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具备下列有益效果:
35、1.本发明采用利用不同视角的二维图像迭代求解三维空间空间点的三维坐标和相机位姿,该方法充分利用已知的相机相对位姿与空间点坐标,无需进行矩阵的奇异值分解,可以大大增加位姿估计与三维点坐标的求解速度;
36、2.本发明通过采用基础矩阵,本质矩阵求解获得两个相邻视角相机的相对位姿,该方法可以免去繁琐的相机定位,而直接通过极线几何求解相机的相对位姿;
37、3.本发明中采用r(3,:)(x-t)>0判定旋转矩阵和平移矩阵,本质矩阵的奇异值分解中求得的旋转矩阵与平移矩阵一共有4组可能的组合,而只有三维点x在两个相机视角前方的组合为唯一正解,因此需要增加此判定来求解;
38、4.本发明中采用重投影误差,由于在相机位姿与三维点坐标的迭代求解过程中存在噪音与误差,所以需要采用优化方法来尽量降低误差,重投影误差的计算非常简便,不消耗算力,并且是一个大于0的正值,有利于加快优化方法中迭代计算的收敛。
- 还没有人留言评论。精彩留言会获得点赞!