一种快递面单识别方法及系统与流程
本技术涉及物流信息处理,具体而言,涉及一种快递面单识别方法及系统。
背景技术:
1、随着人工智能技术的发展,快递智能分拣技术越来越成熟,需要人为干预的环节也是越来越少。快递智能分拣技术可以简要的分为识别、上包和下包几个方面。快递智能分拣线,区别于传统的分拣快递技术,是采用一种快递分拣小车进行快递的智能化分拣;快递分拣小车在轨道上运动,拖动多个可转动的分拣滚筒进行快递分拣。
2、快递的有效识别是进行正确分拣的第一步,也是较为重要的一步。现有的快递面单识别技术采用狂扫设备,具体的,在识别区域通常架设2~3个扫描设备,这些扫描设备不管有无快递,始终以很快的频率进行扫描拍照分析,不考虑耗电功耗等信息,还会经常出现识别出错的问题。具体的,智能分拣线快速运行中,每个快递包裹在每个车辆对应的分拣滚筒上。每个车辆的每个滚筒具有唯一的标识信息,而且每个分拣滚筒上有且仅有一个快递包裹,扫描设备识别的目的是通过条形码标识车辆中滚筒的唯一标识信息,而采用传统的ocr扫描拍照技术进行快递面单的解析是行不通的,因为,在车辆快速运行中,传统ocr拍照技术容易误将滚筒的标识信息当成快递面单进行误识别,而且传统的ocr拍照相机因为持续对快递进行拍照,滚筒的唯一标识信息容易被多次识别,导致异常订单增加,从而车辆无法准确判断下包位置,导致快递下包错误。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种快递面单识别方法及系统,能够准确通过一次拍照将快递面单和此快递存放的车辆滚筒的标识信息精准的识别出来,从而准确判断此快递的下包位置,精准、快速的完成智能分拣。
2、本技术实施例中提供一种快递面单识别方法,应用于快递面单识别系统,所述快递面单识别系统包括:至少一个快递车和至少一个识别设备,其中,每个快递车拖动至少一个滚筒在轨道上运行;所述方法包括:
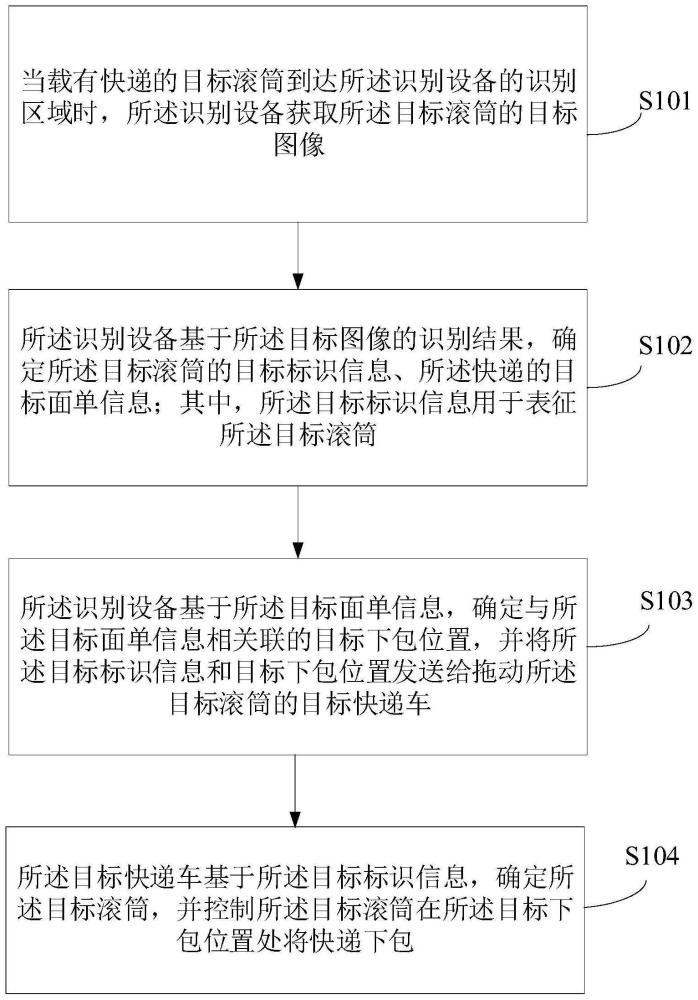
3、当载有快递的目标滚筒到达所述识别设备的识别区域时,所述识别设备获取所述目标滚筒的目标图像;
4、所述识别设备基于所述目标图像的识别结果,确定所述目标滚筒的目标标识信息、所述快递的目标面单信息;其中,所述目标标识信息用于表征所述目标滚筒;
5、所述识别设备基于所述目标面单信息,确定与所述目标面单信息相关联的目标下包位置,并将所述目标标识信息和目标下包位置发送给拖动所述目标滚筒的目标快递车;
6、所述目标快递车基于所述目标标识信息,确定所述目标滚筒,并控制所述目标滚筒在所述目标下包位置处将快递下包。
7、在一些实施例中,所述的快递面单识别方法中,所述载有快递的目标滚筒到达所述识别设备的识别区域,是通过以下方法确定的:
8、所述识别设备判断是否正常接收到交互拍照指令;所述交互拍照指令是目标快递车确定所述目标滚筒到达所述识别区域时生成并发送的;
9、若是,则确定所述目标滚筒到达所述识别设备的识别区域;
10、若否,则基于快递面单识别系统中到位检测组件发送的滚筒到位信号,确定所述目标滚筒到达所述识别设备的识别区域。
11、在一些实施例中,所述的快递面单识别方法中,所述识别设备判断是否正常接收到交互拍照指令,包括:
12、所述识别设备判断是否在滚筒到位信号之后接收到交互拍照指令;
13、若否,则所述识别设备确定正常接收到交互拍照指令;
14、若是,则判断接收所述滚筒到位信号和所述交互拍照指令的时间差是否满足预设时长阈值;所述预设时长阈值是基于以下至少一种因素确定的:识别设备的预设拍照时延、目标快递车的实时速度信息、滚筒长度、到位检测组件的安装位置;
15、若是,则识别设备确定正常接收到交互拍照指令。
16、在一些实施例中,所述的快递面单识别方法中,所述交互拍照指令,是通过以下步骤生成的:
17、所述目标快递车基于传感器模块采集的位置信号,确定目标滚筒在轨道上的目标实时位置;
18、所述目标快递车基于自身的实时速度信息和识别设备的预设拍照时延,校正所述目标实时位置;
19、当校正后的实时目标位置满足所述识别设备的识别区域对应的预设位置条件时,确定所述目标滚筒到达所述识别区域,并生成交互拍照指令。
20、在一些实施例中,所述的快递面单识别方法中,所述目标快递车基于位置传感器模块采集的位置信号,确定目标滚筒在轨道上的目标实时位置;包括:
21、所述目标快递车基于位置传感器模块采集的位置信号,确定目标快递车在轨道上的实时位置信息;
22、基于所述实时位置信息、目标滚筒和目标快递车的目标相对位置信息,确定目标滚筒在轨道上的目标实时位置。
23、在一些实施例中,所述的快递面单识别方法中,所述方法还包括:
24、所述快递面单识别系统上电时,所述识别设备向目标快递车发送所述识别设备的位置信息;
25、所述目标快递车基于所述识别设备的位置信息,配置所述识别设备的识别区域对应的预设位置条件。
26、在一些实施例中,所述的快递面单识别方法中,在当载有快递的目标滚筒到达所述识别设备的识别区域时,所述识别设备获取所述目标滚筒的目标图像之前;所述方法还包括:
27、所述目标滚筒内部的多种快递传感器采集多种状态检测信号;其中,不同种类的状态检测信号,用于检测滚筒内部不同类型的快递;
28、当基于至少一种状态检测信号确定目标滚筒内有快递时,确定该滚筒为载有快递的目标滚筒。
29、在一些实施例中,所述的快递面单识别方法中,所述交互拍照指令中包括表征目标滚筒的第一标识信息;
30、所述识别设备基于所述目标图像的识别结果,确定所述目标滚筒的目标标识信息、所述快递的目标面单信息,包括:
31、所述识别设备识别出目标图像中表征目标滚筒的第二标识信息和面单信息;
32、当所述第一标识信息和第二标识信息一致时,确定第二标识信息为目标标识信息、识别出的面单信息为目标面单信息;
33、当所述第一标识信息和第二标识信息不一致时,确定第一标识信息为目标标识信息、预先存储的对应第一标识信息的面单信息为目标面单信息。
34、在一些实施例中,还提供一种快递面单识别系统,所述快递面单识别系统包括:至少一个快递车和至少一个识别设备,其中,每个快递车拖动至少一个滚筒在轨道上运行;
35、所述识别设备,用于当载有快递的目标滚筒到达所述识别设备的识别区域时,获取所述目标滚筒的目标图像;
36、所述识别设备,还用于基于所述目标图像的识别结果,确定所述目标滚筒的目标标识信息、所述快递的目标面单信息;其中,所述目标标识信息用于表征所述目标滚筒;
37、所述识别设备,还用于基于所述目标面单信息,确定与所述目标面单信息相关联的目标下包位置,并将所述目标标识信息和目标下包位置发送给拖动所述目标滚筒的目标快递车;
38、所述目标快递车,用于基于所述目标标识信息,确定所述目标滚筒,并控制所述目标滚筒在所述目标下包位置处将快递下包。
39、在一些实施例中,所述的快递面单识别系统还包括到位检测组件、设置在快递车上的位置传感器模块和滚筒内部的多种快递传感器;
40、所述到位检测组件,用于在检测到目标滚筒时生成滚筒到位信号,并将所述滚筒到位信号发送给所述识别设备;
41、所述位置传感器模块,用于采集位置信号,以确定快递车的目标滚筒在轨道上的目标实时位置;
42、所述多种快递传感器,用于采集多种状态检测信号;其中,不同种类的状态检测信号,用于检测滚筒内部不同类型的快递。本技术实施例中,提供一种快递面单识别方法及系统,所述快递面单识别方法应用于快递面单识别系统,所述快递面单识别系统包括:至少一个快递车和至少一个识别设备,其中,每个快递车拖动至少一个滚筒在轨道上运行;所述方法包括:当载有快递的目标滚筒到达所述识别设备的识别区域时,所述识别设备获取所述目标滚筒的目标图像;所述识别设备基于所述目标图像的识别结果,确定所述目标滚筒的目标标识信息、所述快递的目标面单信息;其中,所述目标标识信息用于表征所述目标滚筒;所述识别设备基于所述目标面单信息,确定与所述目标面单信息相关联的目标下包位置,并将所述目标标识信息和目标下包位置发送给拖动所述目标滚筒的目标快递车;所述目标快递车基于所述目标标识信息,确定所述目标滚筒,并控制所述目标滚筒在所述目标下包位置处将快递下包;通过信息交互的手段,使得识别设备能够在目标快递车中装载有快递的目标滚筒到达识别区域时能够通过一次拍照将目标快递的快递面单解析出来,同时也能将此目标快递存放的滚筒的唯一标识信息识别出来,将面单信息与滚筒的唯一标识信息进行绑定分析,防止滚筒的唯一标识信息被多次识别导致异常订单增加,能够准确解析出下包位置并将下包位置信息通知到快递车,使执行机构到相应的下包位置完成智能分拣。
- 还没有人留言评论。精彩留言会获得点赞!