一种配电线路缺陷图像无人机采集控制方法与流程
本发明涉及配电线路缺陷识别,尤其涉及一种配电线路缺陷图像无人机采集控制方法。
背景技术:
1、当前配电线路设备点多面广,巡检环境复杂且变化快,日益增长的配电线路数量给公司配网安稳运行带来巨大的压力。但由于10kv配电线路架设高度低,路径环境复杂等原因,设备资源配置与无人机作业效率仍有待进一步提升。一方面,由于配电线路环境复杂,在配电线路无人机作业过程中可能会造成数据采集技术受限、飞行路线规划难度大等问题;另一方面,现有配电机巢选址部署以及无人机网格化巡检多机协同策略仍存在技术空缺;同时,配电线路设备规模逐年增长,影像数据量逐年递增,缺陷图像识别工作量不断增加,对图像识别的及时性与精确性提出了更高的需求。
2、现有技术中,配电线路无人机激光点云采集目前依赖于人机协同,实时障碍判断、自动识别目标杆塔、攀升避障、转向飞行、对焦拍照等功能有待提升,缺乏无人机自全自主飞行与采集技术。同时,无人机采集的激光点云数据缺乏广泛而深入的应用。
3、例如,一种在中国专利文献上公开的“一种基于输配电线路无人机图像采集自动化智能缺陷分析系统”,其公告号:cn113781450a,公开了包括具有建立输电线路地理图和通道三维管控区域图、自动判定隐患缺陷位置,但是该方案没有通过点云对故障进行判断。
技术实现思路
1、为了解决现有技术中点云数据在故障判断中精度不高的问题,本发明提供一种配电线路缺陷图像无人机采集控制方法,能够结合无人机线路变化参数及环境参数,对连续采集的配电线路故障图像进行智能识别,减少图像识别算法的复杂程度和误差,从而能够根据无人机的运动轨迹来调节故障图像识别的精确度。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种配电线路缺陷图像无人机采集控制方法,包括如下步骤,s1、目标识别,根据点云数据识别配电线路中特殊结构,根据所述的特殊结构调整无人机路径;
4、s2、故障判断,对无人机不同位姿下采集的图像进行故障判断,设定精度目标,在所述的精度目标下对故障判断的结果进行评估;
5、根据所述的评估结果调整无人机位姿,在新的位姿下进行第二次采集图像,根据第二次采集图像进行第二次判断故障;
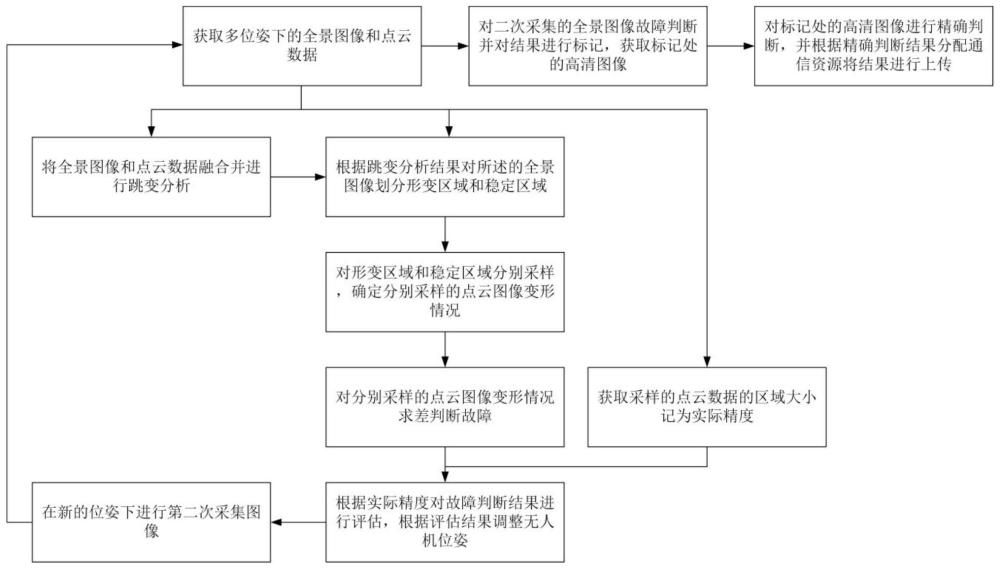
6、s3、聚焦拍照,对所述的第二次判断故障的结果进行聚焦拍照,获取目标处的高清图像进行精确判断并上传;实时根据精确判断结果选择最优通信方式进行上传。通过设定精度目标对点云数据下的故障判断进行评估,并通过根据评估结果改变位姿,从而改变缺陷图像识别的精度。能够根据识别精度来调整无人机位姿,进而通过调整无人机位姿来实现调整识别精度,从而提高缺陷图像的识别准确度。
7、作为优选的,对无人机不同位姿下采集的图像进行故障判断包括,获取多位姿下的全景图像,对全景图像中划分形变区域和稳定区域,形变区域划分包括将全景图像和点云数据融合并进行跳变分析,对形变区域和稳定区域进行比较确定故障。获取无人机在行进过程中的实时图像,将相邻的m个实时图像缝合为全景图像并进行故障判断,通过调整m的大小实现改变故障判断的频率与精确度;将全景图像根据圆周分布,按照分隔角度i对全景图像进行分隔,其中分隔角度i和获取间隔k具有三角函数关系;对相邻的分割后的图像中重叠部分进行是视差计算,得到像素点的视差值,根据视差值将像素点和三维点云数据对应,得到三维图;对三维图内的区域进行划分,划分依据包括聚类算法,将像素点周围三维坐标变化程度相似的像素点划分为一个区域;划分区域后的大面积区域为稳定区域,小面积区域和孤立点为形变区域,分别将形变区域和稳定区域内像素点的变化情况拟合为曲线段,对比曲线段的二次积分差,得到评估结果。能够对取景图像中配电线路设备进行缺陷检测,同时将所有故障区域检测出来,同时获取故障区域和非故障区域,提高检测效率。
8、作为优选的,比较确定故障包括对形变区域和稳定区域分别采样,确定分别采样的点云图像变形情况,对分别采样的点云图像变形情况求差判断故障,同时获取采样的点云数据的区域大小记为实际精度。对形变区域和稳定区域分别获取采样点,采样点的选取包括对区域内的聚类结果进行距离筛选,将聚类中心至距离k的点集合作为采样区域,将采样区域内的像素点之间坐标变化率进行拟合,得到曲线段,对曲线段进行积分计算,比较形变区域和稳定区域内的曲线积分差,同时获取采样区域的面积记为实际精度。通过采样区域内像素点的数目、曲线段的横坐标长度对分析精度进行考量,进而实现在改变精度的时候,能够改变采样区域的大小、改变故障判断的位置精度、改变获得故障的变化精度,即使故障变化点很微小也能通过改变精度被判断出。
9、作为优选的,对故障判断的结果进行评估包括,以点云数据的区域大小为实际精度,根据配电网设备不同、故障位置不同共同设定精度目标梯度,故障判断后的步骤包括判断故障判断的精度是否达到精度目标梯度要求,并调整无人机的飞行姿态。将精度目标作为b,精度目标梯度为元素n,配电网设备类型为i,故障位置为j,元素n分别以i和j作为行数和列数组成矩阵,精度目标梯度为矩阵内不同位置的元素,矩阵内不同位置元素分别连接有最适宜飞行姿态,判断实际精度是否达到矩阵内对应位置的元素大小,根据判断结果调整飞行位姿。通过对配电网设备、故障位置对精度要求的不同来实现自适应调整,使得对于不同位置、不同设备的故障判断能够采用不同的精度,进一步提高不同位置、不同设备的缺陷图像故障判断精度。
10、作为优选的,调整无人机的飞行姿态包括,获取故障判断的精度与对应设备、故障位置的精度目标梯度的调整差值,设定调整差值和飞行姿态的调整函数,调整函数中输入为调整差值,输出为飞行姿态,调整姿态后的步骤为重新进行故障判断。飞行姿态包括飞行速度、飞行高度、无人机相对于故障点的飞行角度,对矩阵内不同位置元素分别设置最适宜飞行姿态,将无人机的实时飞行姿态向最适宜飞行姿态改变,同时继续进行故障判断,直到精度符合精度目标梯度。调整函数中调整差值和飞行速度反比例相关、调整差值和飞行高度反比例相关、调整差值和飞行角度为三角函数关系。能够在精度不够的时候调整飞行姿态,进而改变获取图像时的运动状态,改变运动状态对图像获取的影响,提高判断精度。
11、作为优选的,目标识别的实现包括,将点云数据按照同一方向投影到全景图像中,得到点云深度,将带你云深度远离全景图像的一端连接形成网络,将网络中节点与全景图像的像素点对应,根据网络图形与图形库中特殊结构图像进行匹配,并根据匹配结果调整路径。图形库中存储有配电线路中各特殊结构及设备的三维图形,通过三维图形和网络图形的匹配实现目标识别,将识别后的设备和特殊结构采用不同颜色进行标记,根据设备和特殊结构对全景图像外的图像进行延伸,根据延伸图像规划无人机路径。能够在飞行时对无人机的路径提前进行规划,使得无人机在某一位置进行故障判断时,同时确定故障判断的设备和特殊结构。
12、作为优选的,聚焦拍照的实现包括,对故障判断的结果进行标记,对标记点进行聚焦拍照获取高清图像,从基础图像库中获取故障判断结果处的原始图像,根据原始图像和高清图像对比,完成精确判断故障。在故障判断结果的实际精度达到精度目标梯度后,发出标记信号,根据标记信号对全景图像中对应位置进行聚焦捕捉高清图像,原始图像和高清图像的对比包括使用哈西算法或转换为二进制码比较像素等方法。能够初步判断出故障图像后,进一步通过改善图像质量进行识别,提高了无人机采集识别的准确性,通过多次识别获取缺陷,弥补了无人机识别中拍照能力不足、图像处理能力不足的问题。
13、作为优选的,调整姿态的实现时,根据精度由大至小选取故障结果进行调整;聚焦拍照的实现时,根据调整姿态选取的故障结果进行拍照。对故障判断的结果进行排序,排序的根据为实际精度与精度目标梯度的差值,根据差值从小到大进行排序,通过对调整幅度小的判断结果先调整,提高故障判断时多结果调整精度的效率,能够更快获得每一个符合精度要求的故障结果。同时提高了再次获取故障判断结果的高清图像时的效率,提高了整个识别方法的效率。
14、作为优选的,所述的二次拍照并上传时对每个无人机的通信资源进行重新分配,s21、将通信资源作为待分配资源,将无人机的待传输数据打上分时标记作为需分配资源;
15、s22、对待分配资源和待传输数据根据分时标记进行分配并通过蜉蝣算法进行优化得到最优匹配值,得到最适合当前无人机的通信资源;
16、s23、根据最优匹配值的大小将需分配资源和待分配资源进行匹配,将匹配结果根据分时标记反馈释放待分配资源到无人机。获取未被占用的通信资源作为待通信资源,获取待传输的通信数据作为需分配资源,将需分配资源根据待分配资源的分布进行划分得到需分配资源子数据,提高需分配资源的传输效率;对需分配资源子数据确定资源量并打上标记;对需分配资源子数据和待分配资源进行匹配并通过蜉蝣算法根据通信用时进行迭代优化,从而得到最高的传输效率,实现对分布式资源最大效率的配置。
17、作为优选的,所述的s21中包括,获取分布矩阵,所述的分布矩阵通过需分配资源的分布情况建立;确定分布矩阵的分布系数,以分布系数对需分配资源进行分类,为分类后的每个需分配资源打上分时标记。获取待分配资源的位置和待分配资源的参数,包括通信资源的通信能力和通信路径;建立分布矩阵,分布矩阵的每一项分别对应一个待分配资源,分布矩阵每一项的位置分别对应待分配资源之间的相对位置,分布矩阵每一项的数据分别对应待分配资源的参数。设定变换函数,变换函数用于将分布矩阵变为多个向量组成的向量组,变换函数的输入为分布矩阵的每一项,变换函数的输出为向量组;向量组中的每一项分别为不同的分布系数,通过分布系数得到需分配资源在多个不同向量位置的分布,得到需分配资源子数据,根据需分配资源子数据的资源量和该处待分配资源的参数为需分配资源子数据打上分时标记。通过对需分配数据的划分改变传输方式,提高传输效率,基于待分配数据的分布矩阵进行划分实现需分配数据的准确划分,便于对划分后的需分配数据进行匹配和传输,提高划分后的需分配数据的传输效率。
18、作为优选的,所述的分布矩阵包括无人机的传输距离和无人机位置;所述的分布系数包括同一时刻下无人机的待传输的数据传输量;所述的分时标记包括无人机的待传输数据基于分布系数的总传输时间。通过分布矩阵得到待分配资源的物理特征,分布系数表示每一处通信终端同一时间内能用于传输的通信资源,分布系数表示该处通信终端同一时间内能传输的最大数据传输量;分时标记的确定包括根据该处待分配资源的通信能力计算需分配资源子数据的数据量在该处的通信时间。通过分时标记得到需分配资源子数据传输时间,从而便于确定需分配资源最终的传输时间,并且便于确定待分配资源的占用时间,能够表示需分配资源和该处待分配资源的匹配程度。从而便于进行分配。
19、作为优选的,所述的s22中包括,获得无人机的需分配资源子数据,对无人机的需分配资源子数据序列匹配待分配资源;将无人机的需分配子资源和待分配资源进行蜉蝣算法优化。在每一处待分配资源对需分配资源子数据根据分时标记的长短进行排序,对每处待分配资源和其匹配的第一个需分配资源子数据进行匹配,实现第一次匹配,以需分配资源子数据和待分配资源分别作为蜉蝣算法的种群,待分配资源的传输距离和资源位置作为种群特征值,以最终需分配资源子数据的总用时作为更新目标。从而实现对需分配资源子数据和待分配数据的最优匹配,得到需分配资源子数据的最优分配方法。实现需分配资源子数据在通信过程时或通信过程前的匹配。
20、作为优选的,所述的s23中包括,根据最优匹配值将待分配资源重新进行匹配,完成无人机和通信信道的重新匹配并将对应的分时标记上传,对分时标记进行更新,根据更新后的分时标记对待分配资源进行释放。根据最优匹配值对需分配资源子数据进行分配并将对应的分时标记上传,对分时标记的上传在需分配资源子数据通过待分配资源之后,并在分时标记的上传之后,进行下一次对需分配资源子数据的匹配传输。
21、作为优选的,包括:建立云端服务器,所述的云端服务器连接有区域分配模块,所述的区域分配模块连接有多个通信终端,通信终端位于每个无人机中;所述的区域分配模块对无人机的待分配资源和需分配资源进行分配。云端服务器用于将分散的多种业务进行接入;区域分配模块用于将本地通信网络和电力远程通信进行统一调度,同时对各种业务传输的数据资源进行分配,提高网络传输效率和安全性。
22、作为优选的,所述的区域分配模块包括蜉蝣计算模型,蜉蝣计算模型的输入项包括需分配资源和待分配资源,蜉蝣计算模型的输出项包括最优匹配值,最优匹配值包括每个需分配资源均匹配到待分配资源后,所有匹配结果的的最小总用时。蜉蝣计算模型用于对需分配资源和待分配资源分别按照位置和传输速度进行迭代,最终得到最快的传输路径。能够将不同通信终端进行利用,从而提高需分配资源的传输效率和通信资源利用率,并提高通信网络传输的可靠性。
23、作为优选的,蜉蝣计算模型连接有适应度值模型和占用信号,适应度模型包括对比需分配资源和待分配资源的通信要求,根据通信要求输出适应值系数,适应值系数用于影响需分配资源在该待分配资源的传输时间计算;占用信号用于显示该待分配资源是否占用。通过适应度模型将不同通信类型对数据传输速度的影响加入到资源配置计算中,实现多种不同通信资源聚合统一配置时的准确性。通过占用信号显示待分配资源是否占用,便于资源配置时实时获取不占用的待分配资源进行配置。
24、作为优选的,云端服务器包括多个本地局域网,每个本地局域网之间互相连接,每个本地局域网与多个通信终端连接。每个本地局域网设有一个局域控制器,区域分配模块位于局域控制器中。能够将分散的通信网络进行区域化的整合,再将区域化的通信网络进行整合,便于在通信资源配置时提高零散资源配置的效率。
25、本发明具有如下优点:
26、(1)能够结合无人机线路变化参数及环境参数,对连续采集的配电线路故障图像进行智能识别,减少图像识别算法的复杂程度和误差,从而能够根据无人机的运动轨迹来调节故障图像识别的精确度;(2)提出基于障碍判断、目标识别、对焦拍照的自动飞行算法;(3)提出基于激光雷达自主仿线自动飞行技术结合的全自主激光点云采集技术;(4)提出一种激光点云数据深化应用方法,建立线路激光点云数据库,分析线路通道隐患发展趋势;(5)能够对不同情况的无人机通信进行分配。
- 还没有人留言评论。精彩留言会获得点赞!