一种汽车后轮主动转向系统的性能评测方法及系统与流程
本发明涉及汽车后轮智能控制,具体而言,涉及一种汽车后轮主动转向系统的性能评测方法及系统。
背景技术:
1、后轮主动转向系统是高端车上的主要配置,其具有提升低速机动性、高速稳定性的作用,随着自主车型高端化、智能化的发展,逐步出现了一些带后轮主动转向的车辆,预测也将出来更多该配置的车型,目前自主车企、零部件还未实现量产后轮主动转向系统,当前研究机构、企业的方向集中在后轮转向执行器、控制器、控制策略,对工程化的后轮转向系统测试评价方法研究较少。后轮转向相对前轮转向,需要更高的安全。
2、目前缺乏一套完善的,专门针对后轮主动转向系统的评价系统,开发人员更多基于通用的整车性能及转向系统的标准、方法或软件功能的方法进行开发,存在不全面、不精准的问题。
3、此外,目前的测试系统只是局限最终实车测试评价,缺少满足开发阶段的虚拟仿真、半实物仿真测试方法,对于极限、异常等危险场景,在安全、成本、周期上存在较大的限制。
技术实现思路
1、本发明的目的是提供一种汽车后轮主动转向系统的性能评测方法及系统,来解决现有技术中的上述问题。
2、本发明的实施例通过以下技术方案实现:
3、第一方面,本发明提供一种汽车后轮主动转向系统的性能评测方法,包括:
4、获取当前车辆所在功能场景,根据功能场景获得当前功能场景的场景工况,所述功能场景包括常规功能场景和非常规功能场景,所述常规功能场景包括泊车场景、低速行驶场景、中速行驶场景、高速行驶场景和变速行驶场景,所述非常规功能场景包括极限驾驶场景和异常场景;
5、根据场景工况设置车辆行驶路面状态及对应的车辆行驶控制,所述车辆行驶控制包括纵向控制和转向控制,
6、通过车辆行驶控制获取车辆及系统的状态参数,根据各个状态参数的特征指标和场景工况确定评价指标,所述评价指标包括若干个性能指标,所述性能指标包括机动及轻便指标、稳定及安全指标、操控指标、振动噪音指标和节能指标;
7、获取无后转系统车辆及带后转竞品车辆的评价指标的数据集,设置特征指标参考值的上下限值,并对若干个性能指标设置权重系数,计算加权平均值,最终输出性能指标的评分值。
8、在本发明一实施例中,所述泊车场景的场景工况包括原地快速转向场景工况、低速前行快速转向场景工况、低速倒车快速转向场景工况、倒车场景工况、侧方位停车场景工况和自动泊车场景工况;
9、获取当前泊车场景的场景工况信息,若当前场景工况信息为原地快速转向场景工况时,则输出第一控制信号,所述第一控制信号包括纵向控制为控制车辆车速为零,制动强度最高,转向控制为以正弦输入转动方向,幅值为最大转角,循环三个周期;
10、若当前场景工况信息为低速前行快速转向场景工况、低速倒车快速转向场景工况时,则输出第二控制信号,所述第二控制信号包括纵向控制为控制车辆车速差值不超过5km/h的三个速度,转向控制为以阶跃输入转动方向到最大位移,阶跃时间为若干秒,并记录时间;
11、若当前场景工况信息为倒车场景工况、侧方位停车场景工况和自动泊车场景工况时,则开启车辆对应行驶状态进行测试。
12、在本发明一实施例中,所述低速行驶场景的场景工况包括不平路面直线行驶场景工况和若干不同路径曲率转弯场景工况;
13、获取当前低速行驶场景的场景工况信息,若当前场景工况信息为不平路面直线行驶场景工况,则输出第三控制信号,所述第三控制信号包括纵向控制为控制车辆车速等差值为10km/h的三个速度,转向控制为直线行驶;
14、若当前场景工况信息为转弯场景工况,则输出第四控制信号,所述第四控制信号包括纵向控制为控制车辆车速等差值为10km/h的三个速度,转向控制为以当前转弯场景工况的对应转弯角度进行闭环控制。
15、在本发明一实施例中,所述中速行驶场景和高速行驶场景的场景工况包括不平路面直线行驶工况和若干不同车道的变线工况;
16、获取当前中速行驶场景或者高速行驶场景的场景工况信息,若当前场景工况信息为不平路面直线行驶工况,则输出第五控制信号,所述第五控制信号包括纵向控制为控制车辆高速车速等差值为20km/h的三个速度,中速车速等差值为10km/h的五个速度,转向控制为直线行驶;
17、若当前场景工况信息为变线工况,则输出第六控制信号,所述第六控制信号包括纵向控制为控制车辆高速车速等差值为20km/h的三个速度,中速车速等差值为10km/h的五个速度,转向控制为单车道或者多车道的变向控制。
18、在本发明一实施例中,所述高速行驶场景的场景工况还包括正弦连续转向工况;
19、获取当前高速行驶场景中的正弦连续转向工况信息,输出第七控制信号,所述第七控制信号包括纵向控制为控制车辆车速等差值为20km/h的三个速度,转向控制为每次以固定的频率,进行方向盘转角正弦输入,方向盘转角大小以达到最大的侧向加速度进行控制。
20、在本发明一实施例中,所述变速行驶场景包括定圆加减速度工况和定转角加减速工况;
21、获取当前变速行驶场景的场景工况信息,若当前场景工况信息为定圆加减速度工况,则输出第八控制信号,所述第八控制信号包括纵向控制为控制车辆若干加速度进行加减速行驶,转向控制为控制车辆以若干半径进行固定行驶;
22、若当前场景工况信息为定转角加减速度工况,则输出第九控制信号,所述第九控制信号包括纵向控制为控制车辆若干加速度进行加减速行驶,转向控制为控制方向盘以若干角度进行固定行驶。
23、在本发明一实施例中,所述极限驾驶场景的场景工况包括弯道稳定极限工况、弯道急加减速极限工况、直线紧急避让极限工况、弯道快速阶跃极限工况和蛇形绕桩极限工况;
24、获取当前变速行驶场景的场景工况信息,若当前场景工况为弯道稳定极限工况或者弯道急加减速极限工况,则输出第十控制信号,所述第十控制信号包括纵向控制为控制车辆以增加的车速驶入弯道,或,在弯道中进行增加车速,转向控制为控制方向盘角度按弯道路径行程,车速增加直到车辆达到稳定极限;
25、若当前场景工况为直线紧急避让极限工况或弯道快速阶跃极限工况,则输出第十一控制信号,所述第十一控制信号包括纵向控制为控制车辆匀速行驶,转向控制为控制方向盘角度以阶跃输入,直至车辆达到稳定极限;
26、若当前场景工况为蛇形绕桩极限工况,则输出第十控制信号,所述第十控制信号包括纵向控制为控制车辆匀速行驶,转向控制为控制方向盘以最大速度通过桩桶。
27、在本发明一实施例中,所述通过车辆行驶控制获取车辆的状态参数包括;
28、步骤一:获取方向盘转角、方向盘力矩、左右前轮转角、齿条位移值、齿条移动速度值、左右后轮转角、后转控制器齿条控制指令车速、
29、步骤二:获取当前场景工况,若当前场景工况为泊车场景,则在步骤一的基础上,获取质心轨迹、外侧车轮接地印迹信息和后转系统噪音值;
30、步骤三:若当前场景工况为低速行驶场景、中速行驶场景、高速行驶场景和变速行驶场景或极限驾驶场景,则在步骤一的基础上,获取车身侧倾角和质心侧偏角;
31、步骤四:若当前场景工况为异常场景,则在步骤三的基础上,获取车辆异常信息及参数。
32、在本发明一实施例中,所述终输出性能指标的评分值包括:
33、
34、式中,nx为某项评价指标的评分值,x为特征指标实验值,xmax为特征指标实验值上限,xmax特征指标实验值下限;
35、n=n1α1+n2α2+…nxαx
36、式中,n本次实验的评分值,n1…nx为某项评价指标的评分值,α1…αx为某项评价指标的评分值对应的权重系数。
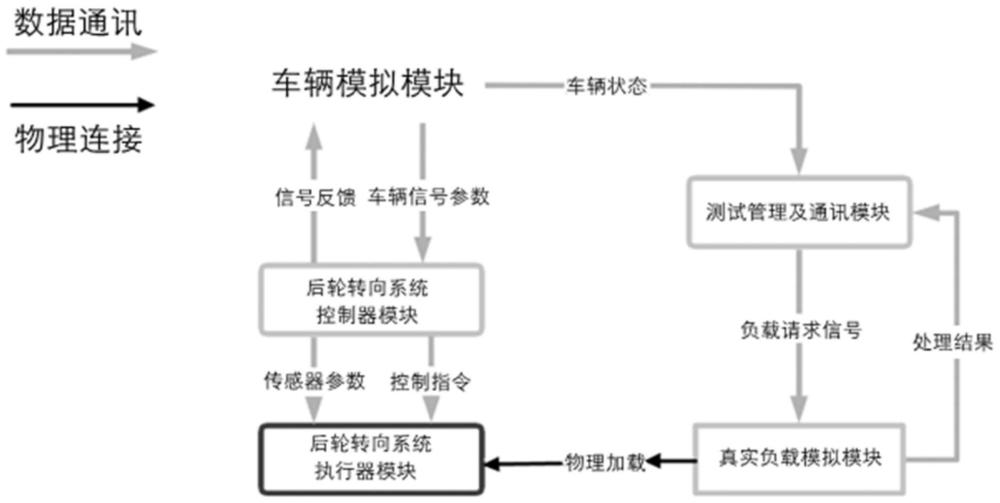
37、第二方面,本发明还提供了一种汽车后轮主动转向系统的性能评测系统,包括与主控装置连接的场景定义模块、虚拟场景及车辆模拟模块、后轮转向系统控制器模块、后轮转向系统执行器模块、测试数据分析模块和评价值计算模块:
38、所述场景定义模块,用于获取当前车辆所在功能场景,根据功能场景获得当前功能场景的场景工况;
39、所述车辆模拟模块,用于根据场景工况设置车辆所处的路面状态及对应的车辆行驶控制,所述车辆行驶控制包括纵向控制和转向控制;
40、所述后轮转向系统控制器模块,用于接收车辆模拟模块、后轮转向系统执行器模块的状态信号,并将计算后的控制指令输出至后轮转向系统执行器,同步将后轮转向系统的状态信号反馈给车辆模拟模块;
41、所述后轮转向系统执行器模块,用于接收后轮转向系统控制器模块的信号,并作出执行动作,同时将后轮转向系统执行器模块的状态参数反馈给后轮转向系统控制器模块;
42、所述测试数据分析模块,用于通过车辆行驶控制获取车辆及系统的状态参数,根据各个状态参数的特征指标和场景工况确定评价指标,所述评价指标包括若干个性能指标,所述性能指标包括机动轻便指标、稳定安全指标、操控指标、振动噪音指标和节能指标;
43、所述评价值计算模块,用于获取无后转系统车辆及带后转车辆的评价指标的数据集,根据数据集,设置特征指标参考值的上下限值,并对若干个性能指标设置权重系数,计算加权平均值,最终输出性能指标的评分值;
44、所述主控装置,用于执行上述的一种汽车后轮主动转向系统的性能评测方法。
45、本发明实施例的技术方案至少具有如下优点和有益效果:
46、本系统基于整车功能需求及车辆动力学性能标准及需求,针对,建立一套完善的后轮转向系统功能及性能评价体系及测试方法。包括:功能场景、场景工况、工况评价指标、评价方法,作为控制策略软件开发阶段的前期评价标准,以此进行虚拟仿真验证,快速进行策略、软件评估及优化。
47、其次,可以作为控制器软硬件集成开发阶段的测试工况及测试用例基础,进行控制器在环的半实物仿真测试,对控制器软件、硬件进行快速验证,作为后轮主动转向系统功能及性能台架测试、整车的标定、测试评价的判定标准,对最终达成功能及性能情况进行完整评价。
- 还没有人留言评论。精彩留言会获得点赞!