一种扑动翼的设计方法
本发明涉及扑翼飞行器。
背景技术:
1、扑翼飞行器由于其与生俱来的独特优势,将在对隐蔽性、机动性要求较高的特殊军民领域发挥不可替代的作用。扑翼飞行器的扑动翼通过扑动机构输出的往复运动向空气做功,进而产生平衡重力所需的升力以及推进所需的推力,是扑翼飞行器实现高效飞行的关键部件。目前,对于扑翼飞行器扑动翼的设计大多数采取“试错”的方法,这不仅效率低下同时难以获得性能最佳的扑动翼,并没有形成较为完整和统一的设计方法。
2、扑翼飞行器的扑动飞行复杂,一方面是由于扑翼飞行器的尺寸和速度量级较小,处于低雷诺数范围,此时的流动处于层湍流共存的情况;另一方面是由于扑动飞行所带来的非定常效应,例如拍挥效应,前缘涡效应,旋转环量效应等等。因此,对于扑动翼所产生的气动力无法像固定翼飞行器那样使用定常理论来进行计算,这对扑翼飞行器的扑动翼设计带来的巨大的麻烦。尤其是目前扑翼飞行器的扑动翼大多采取骨架加翼膜的柔性结构,这无疑又会带来流固耦合的问题。因此,针对于目前扑翼飞行器扑动翼的设计大多采取的是试错的方法。
3、综上所述,扑翼飞行器的扑动翼设计缺乏一个完整而高效的系统性方法。
技术实现思路
1、本发明要解决的技术问题是提供一种扑动翼的设计方法,它提高了扑动翼的设计迭代速度,降低后期飞行试验的风险,同时避免了“试错”时大量的错误工作量,加快了扑翼飞行器的研制进程。
2、为解决上述技术问题,本发明所采取的技术方案是:
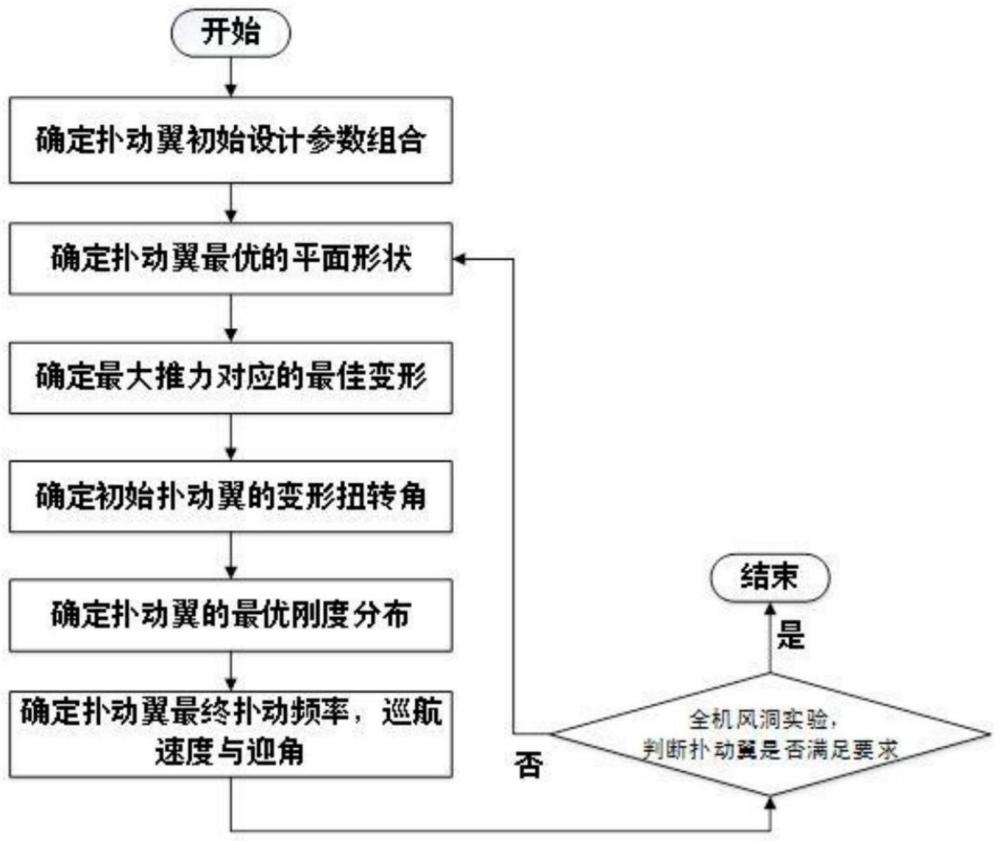
3、1.一种扑动翼的设计方法,扑动翼为仿生扑动翼,仿生扑动翼包括臂翼与手翼,臂翼为与鸟类翅膀的肱骨相对应的部分,手翼为与鸟类翅膀的尺骨和桡骨相对应的部分,其特征在于:方法包括以下步骤:
4、a.确定扑动翼的初始设计参数组合:
5、a).依据扑翼飞行器的设计指标,根据尺度律公式,确定扑动翼的估算翼展b、翼面积s、扑动频率f,扑翼飞行器的设计指标为:起飞总重m和巡航速度vcruise:
6、
7、式中:m为起飞总重;b为翼展;s为翼面积;f为扑动频率;
8、b).依据步骤a)中所获取的扑动频率f及设计指标中的的巡航速度vcruise,根据斯特劳哈尔数相似原则获取扑动幅度a:
9、
10、式中:a为扑动幅度;st为斯特劳哈尔数,斯特劳哈尔数st与扑动翼的净推力正相关,扑翼飞行器在斯特劳哈尔数st为0.2~0.4时具有最高的推进效率,且st大于0.3时,平均功率将大幅增大,因此扑动幅度计算时,st取0.3以兼顾推力大小和推进效率;
11、b.确定扑动翼的最优平面形状,令其为初始扑动翼平面形状:
12、基于步骤a中得到的扑动幅度,以其作为初始设计点,进行扑动翼平面形状的优化设计,得到最优的扑动翼平面形状参数,最优平面形状参数包括翼面积s,展弦比ar,梢根比λ,臂翼占比1b以及控制手翼后缘形状的控制点坐标(x,y),优化模型如下:
13、min d=f(design_parameters)
14、s.t.l≥m0g
15、s.t.b≤b0
16、s.t.p≤p0
17、design_parameters:s,ar,λ,lb,(x,y)
18、式中:d为扑动翼所产生的阻力,其为设计变量的函数,函数关系由计算流体力学cfd或者风洞实验获得;l为扑动翼所产生的升力,其为设计变量的函数,函数关系由计算流体力学cfd或者风洞实验获得,约束为超过扑翼飞行器的起飞重量m0g;b为扑动翼的展长,约束为不超过扑翼飞行器的展长指标b0;p为扑动翼的气动功耗,约束为不超过扑翼飞行器的功耗指标p0;s为扑动翼的翼面积,ar为扑动翼的展弦比,λ为扑动翼的梢根比,臂翼占比1b,控制手翼后缘形状的控制点坐标x,y;
19、c.确定最大推力系数所需要的最佳变形:
20、扑动翼为骨架与膜的构型形式,其变形可等效为不同站位的二维翼型的扭转变形,因此,可通过二维翼型的沉浮扭转运动来模拟三维柔性翼的扑动;进而,通过cfd计算,确定最大推力系数ct与二维翼型的扭转变形角θ之间的关系,得到最大推力所需要的最佳变形θoptimal:
21、h=hmcos(2πft)
22、
23、θoptimal=g(f,hm,a,vcruise)
24、式中:h为沉浮位移,用来模拟三维挥舞运动;hm为沉浮幅度,用来模拟不同展向站位以及扑动幅度的影响;θ为瞬时扭转角,用来模拟扑动翼的柔性;θm为扭转幅度,用来模拟不同的柔性变形;θoptimal为最大推力系数时所对应的最佳扭转角,它通过cfd计算上述沉浮扭转运动得出,是扑动频率f、沉浮幅度hm、扑动幅度a以及巡航速度vcruise的函数;
25、d.确定初始扑动翼的变形扭转角:
26、通过数字图像相关技术dic以及高速摄像机对初始扑动翼在扑动过程中的变形扭转角进行测量,在扑动翼表面粘贴标记点,对高速摄像机进行标定,之后对扑动过程进行拍摄以及标记点坐标(x,y,z)的输出;最终,对标记点坐标进行后处理得到初始扑动翼的变形θbase情况;
27、a).通过dic技术和高速摄像机测量扑动翼各标记点坐标:
28、(x0,y0,z0)
29、(x1,y1,z1)
30、(x2,y2,z2)
31、……
32、(xi,yi,zi)
33、式中:(xi,yi,zi)为扑动翼各标记点空间坐标,为扑动翼扑动角度的函数;
34、b).根据扑动翼靠近翼根处三标记点确定扑动翼参考平面:
35、
36、ax+by+cz=d
37、式中:a,b,c,d分别为控制参考平面的系数,为扑动翼扑动角度的函数;
38、c).获取扑动翼上其余各标记点距离参考平面的距离:
39、
40、d).获取各标记点扭转角,即为初始变形θbase:
41、θbase=arcsin(li/clocal)
42、式中:li为各标记点距离参考平面的距离,为扑动翼扑动角度的函数;clocal为标记点当地的弦长;
43、e.确定扑动翼的最优刚度分布:
44、通过对比初始变形θbase与最佳变形θoptimal之间的关系,对刚度分布进行设计,使得改进后的扑动翼变形θdesign逼近最佳变形θoptimal:
45、θdesign=f(d,m)
46、式中:θdesign为设计后的扑动翼变形,其为刚度分布参数的函数,通过步骤d进行测量;d为前缘碳杆直径,刚度分布参数之一;m为翼膜材料,刚度分布参数之一;
47、f.确定扑动翼的最终扑动频率、巡航速度与迎角:
48、对经过上述步骤设计完成得到的扑动翼进行风洞实验,得到不同巡航速度下,扑动翼升推力以及功耗关于扑动频率和迎角的函数关系,求解升推力平衡方程,以功耗最低为目标,确定扑动翼的最终扑动频率、巡航速度与迎角:
49、a).在不同的巡航速度下,风洞实验测量扑动翼升推力以及功耗关于扑动频率和迎角的函数关系:
50、givenvcruisei
51、l=g(f,α)
52、t=h(f,α)
53、p=s(f,α)
54、b).在不同巡航速度下,求解升推力平衡方程,得到配平点迎角与扑动频率:
55、
56、式中:ftrim为配平点扑动频率,αtrim为配平点迎角,ptrim为配平点功耗;
57、c).比较不同巡航速度下的配平点功耗ptrim大小,得到功耗最低时的巡航速度以及对应的配平点频率ftrim与配平点迎角αtrim;
58、g.通过全机风洞实验判断扑动翼设计是否符合设计指标,符合设计指标则设计流程结束;否则,重复步骤b~步骤f进行迭代,直至符合设计指标。
59、采用上述技术方案所产生的有益效果在于:
60、本发明针对使用尺度律和斯特劳哈尔数相似原则以及“试错”流程进行扑翼飞行器的扑动翼设计问题,提出了扑动翼平面形状优化设计,并以最大推力所对应的最佳变形为评判标准,提出了扑动翼刚度设计的准则,最终通过风洞实验确定扑动翼的巡航飞行状态,从而获得满足要求的最优性能的扑动翼,极大提高了扑动翼的设计迭代速度,降低后期飞行试验的风险,同时避免了“试错”时大量的错误工作量,加快了扑翼飞行器的研制进程。
- 还没有人留言评论。精彩留言会获得点赞!