一种动火作业场景智能备案方法及系统与流程
本发明涉及生产安全管控,具体是一种动火作业场景智能备案方法及系统。
背景技术:
1、动火作业是指在工业、建筑或其他场所进行焊接、切割、烘烤等需要明火操作的工作。这类作业通常需要使用明火或高温设备,因此具有一定的危险性,可能引发火灾或爆炸。
2、动火作业存在较高的风险性,需要进行管控,现有的管控过程大都限定在审批阶段,在实际作业过程中,只会安排工作人员进行定时巡检,巡检密度很低,并且巡检的目的是减少安全隐患,关于动火作业本身的记录几乎为零,使得后续的复检过程非常困难,如何对动火作业进行数据备案,便于后续的复检过程是本发明技术方案想要解决的技术问题。
技术实现思路
1、本发明的目的在于提供一种动火作业场景智能备案方法及系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种动火作业场景智能备案方法,所述方法包括:
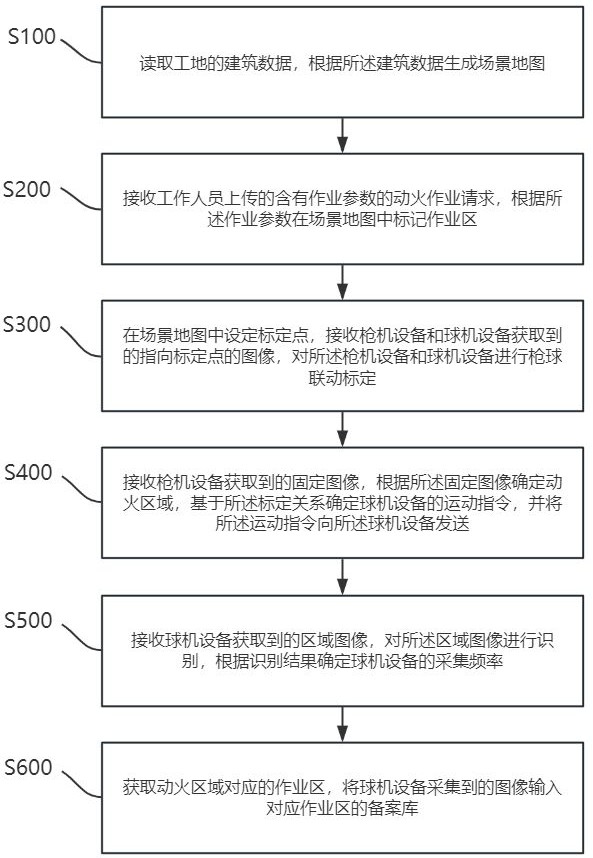
4、读取工地的建筑数据,根据所述建筑数据生成场景地图;
5、接收工作人员上传的含有作业参数的动火作业请求,根据所述作业参数在场景地图中标记作业区;
6、在场景地图中设定标定点,接收枪机设备和球机设备获取到的指向标定点的图像,对所述枪机设备和球机设备进行枪球联动标定;
7、接收枪机设备获取到的固定图像,根据所述固定图像确定动火区域,基于所述标定关系确定球机设备的运动指令,并将所述运动指令向所述球机设备发送;
8、接收球机设备获取到的区域图像,对所述区域图像进行识别,根据识别结果确定球机设备的采集频率;
9、获取动火区域对应的作业区,将球机设备采集到的图像输入对应作业区的备案库。
10、作为本发明进一步的方案:所述接收工作人员上传的含有作业参数的动火作业请求,根据所述作业参数在场景地图中标记作业区的步骤包括:
11、接收工作人员上传的动火作业请求;
12、向工作人员发送信息采集模板,获取作业参数;所述作业参数至少包括作业范围、作业类型和作业主体;
13、根据作业范围在场景地图中标记作业区,根据作业类型和作业主体查询作业区的作业特征;所述作业特征为卷积核表,每个卷积核均是预先统计的由作业类型和作业主体确定的图像特征。
14、作为本发明进一步的方案:所述在场景地图中设定标定点,接收枪机设备和球机设备获取到的指向标定点的图像,对所述枪机设备和球机设备进行枪球联动标定的步骤包括:
15、在场景地图中确定预设的标定点,并获取所述标定点的空间坐标;
16、依次将枪机画面中的中心十字点对应所述标定点,读取相应的空间坐标;
17、根据所述空间坐标和球机的画面图框确定球机的状态表;其中,状态表包括中心项和状态项,所述中心项为画面图框的中心点对应的空间坐标,画面图框的中心点与标定点重合的中心项及其状态项为状态表的表头元素;所述状态表的索引项为标定点坐标。
18、作为本发明进一步的方案:所述接收枪机设备获取到的固定图像,根据所述固定图像确定动火区域,基于所述标定关系确定球机设备的运动指令,并将所述运动指令向所述球机设备发送的步骤包括:
19、接收枪机设备获取到的固定图像,基于作业范围在所述固定图像确定动火区域;
20、获取所述动火区域的中心坐标,根据所述中心坐标确定标定坐标,并根据所述标定坐标读取相应的状态表;
21、读取状态表中的表头元素中的状态项,根据所述状态项确定球机设备的运动指令,并将所述运动指令向所述球机设备发送。
22、作为本发明进一步的方案:所述读取状态表中的表头元素中的状态项,根据所述状态项确定球机设备的运动指令,并将所述运动指令向所述球机设备发送的步骤包括:
23、遍历所述状态表中的数据,计算中心项与所述标定坐标之间的距离;
24、根据所述距离对状态表中的数据进行排序,截取预设数量的数据,并读取相应的状态项,作为边界状态项,并根据所述边界状态项确定限位指令;
25、读取状态表中的表头元素中的状态项,根据所述状态项确定球机设备的运动指令,根据所述限位指令验证所述运动指令的有效性;
26、当所述运动指令有效时,将所述运动指令向所述球机设备发送。
27、作为本发明进一步的方案:所述接收球机设备获取到的区域图像,对所述区域图像进行识别,根据识别结果确定球机设备的采集频率的步骤包括:
28、接收球机设备获取到的区域图像;
29、在卷积核表中读取卷积核,由卷积核遍历固定图像,确定匹配度;
30、当匹配度达到预设的匹配阈值时,获取匹配位置;
31、当匹配位置满足预设的连通条件时,连接匹配位置,得到匹配区域;
32、计算匹配区域与动火区域的比例,根据所述比例确定采集频率;所述采集频率和所述比例呈反比。
33、本发明技术方案还提供了一种动火作业场景智能备案系统,所述系统包括:
34、地图生成模块,用于读取工地的建筑数据,根据所述建筑数据生成场景地图;
35、作业区标记模块,用于接收工作人员上传的含有作业参数的动火作业请求,根据所述作业参数在场景地图中标记作业区;
36、联动标定模块,用于在场景地图中设定标定点,接收枪机设备和球机设备获取到的指向标定点的图像,对所述枪机设备和球机设备进行枪球联动标定;
37、区域定位模块,用于接收枪机设备获取到的固定图像,根据所述固定图像确定动火区域,基于所述标定关系确定球机设备的运动指令,并将所述运动指令向所述球机设备发送;
38、图像采集模块,用于接收球机设备获取到的区域图像,对所述区域图像进行识别,根据识别结果确定球机设备的采集频率;
39、图像备案模块,用于获取动火区域对应的作业区,将球机设备采集到的图像输入对应作业区的备案库。
40、作为本发明进一步的方案:所述作业区标记模块包括:
41、请求接收单元,用于接收工作人员上传的动火作业请求;
42、作业参数获取单元,用于向工作人员发送信息采集模板,获取作业参数;所述作业参数至少包括作业范围、作业类型和作业主体;
43、特征查询单元,用于根据作业范围在场景地图中标记作业区,根据作业类型和作业主体查询作业区的作业特征;所述作业特征为卷积核表,每个卷积核均是预先统计的由作业类型和作业主体确定的图像特征。
44、作为本发明进一步的方案:所述联动标定模块包括:
45、标定点选取单元,用于在场景地图中确定预设的标定点,并获取所述标定点的空间坐标;
46、配准单元,用于依次将枪机画面中的中心十字点对应所述标定点,读取相应的空间坐标;
47、标定执行单元,用于根据所述空间坐标和球机的画面图框确定球机的状态表;其中,状态表包括中心项和状态项,所述中心项为画面图框的中心点对应的空间坐标,画面图框的中心点与标定点重合的中心项及其状态项为状态表的表头元素;所述状态表的索引项为标定点坐标。
48、作为本发明进一步的方案:所述区域定位模块包括:
49、固定图像获取单元,用于接收枪机设备获取到的固定图像,基于作业范围在所述固定图像确定动火区域;
50、状态表查询单元,用于获取所述动火区域的中心坐标,根据所述中心坐标确定标定坐标,并根据所述标定坐标读取相应的状态表;
51、指令读取发送单元,用于读取状态表中的表头元素中的状态项,根据所述状态项确定球机设备的运动指令,并将所述运动指令向所述球机设备发送。
52、与现有技术相比,本发明的有益效果是:本发明基于枪机实时定位作业区,由球机获取作业区的近景图像,作为每个作业区的备案数据,将原有的工作人员巡检任务转移至已有的摄像系统中,极大地提高了巡检密度,并且得到的备案数据直观性好,能够长时间保存,便于后续的复检过程。
- 还没有人留言评论。精彩留言会获得点赞!