一种钻井平台空间平面的人员防碰撞方法及系统与流程
本发明涉及安全防护,尤其涉及一种钻井平台空间平面的人员防碰撞方法及系统。
背景技术:
1、在现代石油钻探作业中,随着技术的不断进步和作业环境的日益复杂,确保钻井平台上人员安全面临着前所未有的挑战。尽管现有的安全管理系统和技术创新,如智能监控系统用于检测工作人员是否按规定佩戴安全装备,已经在一定程度上提升了作业现场的安全水平,但仍存在明显的局限性。特别是对于实时监测平台空间内人员与重型机械、高速运转设备之间的相对位置和动态交互,现有技术难以做到全方位、无死角的覆盖和即时预警。
2、传统依赖人工监督和事后追溯的方法,在面对高密度、高强度的作业环境时显得力不从心。人员疲劳、视线盲区、复杂作业交叉进行等因素,使得即使是最严格的规章制度和最专注的工作人员也难以完全避免意外碰撞事故的发生。这种情况下,一个哪怕微小的疏忽都可能导致严重的安全事故,不仅威胁到工作人员的生命安全,也可能对钻井平台的正常运作和周围环境造成不可估量的影响。
3、因此,亟需一种更为先进、智能化的解决方案,能够主动识别并预测平台空间内潜在的人员与设备碰撞风险,实时发出预警,有效引导人员避险,从而在根本上提升钻井作业的安全管理水平。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种钻井平台空间平面的人员防碰撞方法及系统,其解决了钻井平台上人员与机械设备间的实时动态碰撞风险监测与预警问题的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
5、第一方面,本发明实施例提供一种钻井平台空间平面的人员防碰撞方法,包括:
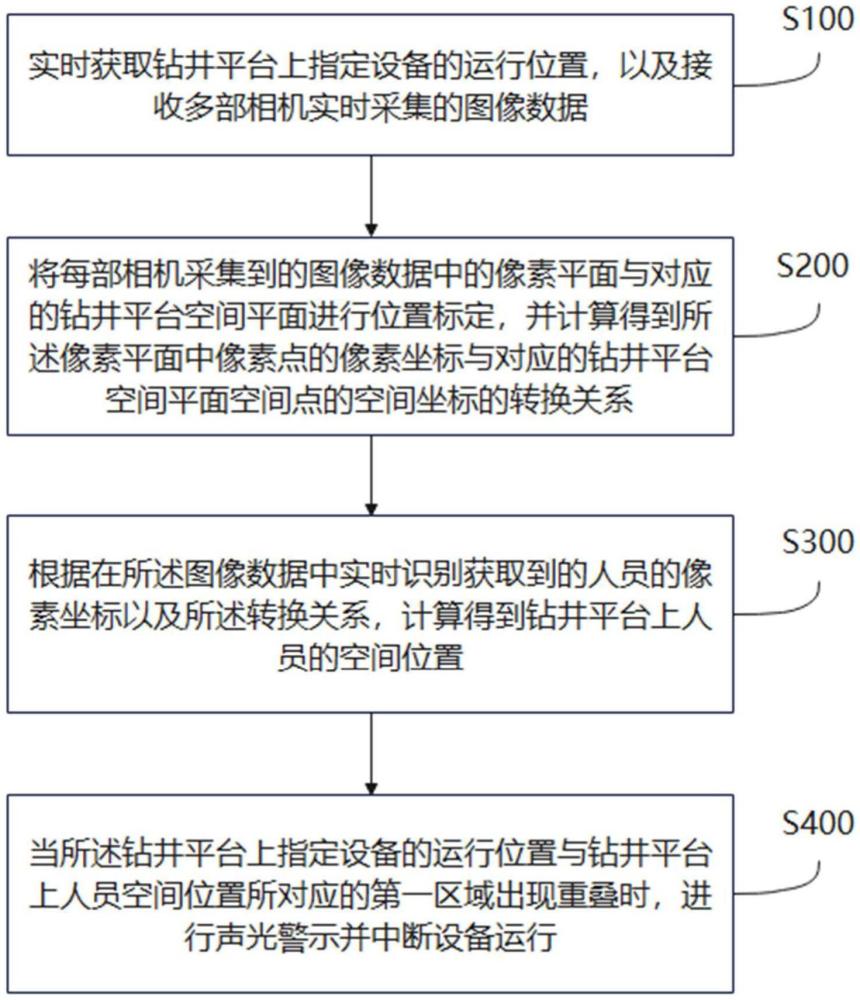
6、s100、实时获取钻井平台上指定设备的运行位置,以及接收多部相机实时采集的图像数据;
7、其中,每部相机的视野内均包括钻井平台上完整的转盘、井口和鼠洞区域,且多部相机联合的视野包括完整的钻井平台区域;
8、s200、将每部相机采集到的图像数据中的像素平面与对应的钻井平台空间平面进行位置标定,并计算得到所述像素平面中像素点的像素坐标与对应的钻井平台空间平面空间点的空间坐标的转换关系;
9、所述钻井平台空间平面包括钻井平台地面平面和钻井平台t高平面,转盘、井口和鼠洞均位于钻井平台地面平面;
10、s300、根据在所述图像数据中实时识别获取到的人员的像素坐标以及所述转换关系,计算得到钻井平台上人员的空间位置;
11、s400、当所述钻井平台上指定设备的运行位置与钻井平台上人员空间位置所对应的第一区域出现重叠时,进行声光警示并中断设备运行。
12、可选地,还包括:
13、s500、将每部相机实时采集到的图像数据输入至预先训练好的深度学习检测模型,当识别出人员头部未佩戴安全帽时,进行声光警示并中断设备运行。
14、可选地,所述s200包括:
15、s210、根据每部相机采集到的图像数据,获取转盘四个顶点、井口中心、鼠洞中心在像素平面上的像素坐标;
16、s220、基于预先输入的转盘四个顶点、井口中心、鼠洞中心在钻井平台地面平面的空间坐标和所述s210中获取到的转盘四个顶点、井口中心、鼠洞中心在像素平面上的像素坐标,根据鼠洞和转盘的相对位置关系,将转盘四个顶点在钻井平台地面平面的空间坐标d1(x1,y1,0)、d2(x2,y2,0)、d3(x3,y3,0)、d4(x4,y4,0)与在像素平面上的像素坐标d1(u1,v1)、d2(u2,v2)、d3(u3,v3)、d4(u4,v4)一一对应标定,得到四个顶点对d1-d1、d2-d2、d3-d3、d4-d4,使得钻井平台地面平面中的空间点与像素平面上的像素点一一对应;
17、s230、根据转盘四个顶点在钻井平台地面平面的空间坐标,得到转盘四个顶点在钻井平台t高平面对应的空间坐标d1t(x1,y1,t)、d2t(x2,y2,t)、d3t(x3,y3,t)、d4t(x4,y4,t);
18、s240、基于转盘四个顶点在钻井平台t高平面对应的空间坐标和在像素平面上的像素坐标,采用预设变换表达式,计算得到钻井平台t高平面和像素平面间的变换矩阵h3×3的具体数值,即得到像素平面上所有像素点的像素坐标与对应钻井平台t高平面上所有空间点的空间坐标之间的转换关系;
19、其中,h3×3为
20、所述预设变换表达式为:
21、
22、其中,x为x1、x2、x3或x4,y为y1、y2、y3或y4,t为预设固定值,h11、h12、h13、h21、h22、h23、h31、h32、h33均为未知系数,u为u1、u2、u3或u4,v为v1、v2、v3或v4。
23、可选地,所述s210包括:
24、s211、针对每部相机采集到的图像数据,识别出至少一个包含转盘、井口和鼠洞的roi区域;
25、s212、针对每一所述roi区域,采用lsd算法进行直线检测,检出转盘边沿四条像素线段,根据四条像素线段所在像素直线两两相交的四个交点,获得转盘四个顶点像素坐标;
26、s213、针对每一所述roi区域,采用hough算法进行圆检测,根据检测出来的圆与所述四条像素线段所包围区域的相对位置关系,分别获得井口中心和鼠洞中心的像素坐标。
27、可选地,所述s220包括:
28、s221、在像素平面上,以井口中心的像素点为中心,从井口中心与鼠洞中心的连线位置开始按逆时针方向扫描,将依次遍历的所述四个交点依次设定为第五顶点d1、第六顶点d2、第七顶点d3、第八顶点d4;
29、s222、将钻井平台地面平面上预先设定的顶点和s221中的顶点进行一一对应标定,得到四个顶点对d1-d1、d2-d2、d3-d3、d4-d4,使得钻井平台地面平面中的空间点与像素平面上的像素点一一对应;
30、所述钻井平台地面平面上预先设定的顶点包括:第一顶点d1、第二顶点d2、第三顶点d3、第四顶点d4,其中,转盘靠近鼠洞的一边上的指定顶点为第一顶点d1,以第一顶点d1为起始位置,以俯视角度沿转盘边沿按逆时针方向依次为第二顶点d2、第三顶点d3、第四顶点d4。
31、可选地,所述s300包括:
32、s310、根据每部相机采集到的图像数据,识别获取钻井平台上的人员头部在像素平面上的像素坐标;
33、s320、根据所述钻井平台上的人员头部在像素平面上的像素坐标,采用所述s240中计算得到的像素平面上所有像素点的像素坐标与对应钻井平台t高平面上所有空间点的空间坐标之间的转换关系,计算得出人员头部在钻井平台上的空间坐标(xr,yr,t)。
34、可选地,所述s400包括:
35、s410、将钻井平台上以(xr,yr)为中心且半径为r所覆盖的区域设定为钻井平台上人员所对应的第一区域;
36、s420、当钻井平台上指定设备的运行位置与所述钻井平台上人员所对应的第一区域出现重叠时,进行声光警示并中断设备运行。
37、可选地,还包括:
38、实时接收钻井平台上环境监测器传输的天气、照明数据,根据天气、照明数据,调节钻井平台上相机的参数,使相机采集到的图像的清晰度达到指定标准。
39、可选地,t为钻井平台上的人员平均身高。
40、第二方面,本发明实施例提供一种钻井平台空间平面的人员防碰撞系统,包括:
41、实时数据获取模块,用于实时获取钻井平台上指定设备的运行位置,以及接收多部相机实时采集的图像数据;
42、其中,每部相机的视野内均包括钻井平台上完整的转盘、井口和鼠洞区域,且多部相机联合的视野包括完整的钻井平台区域;
43、转换关系计算模块,用于将每部相机采集到的图像数据中的像素平面与对应的钻井平台空间平面进行位置标定,并计算得到所述像素平面中像素点的像素坐标与对应的钻井平台空间平面空间点的空间坐标的转换关系;
44、所述钻井平台空间平面包括钻井平台地面平面和钻井平台t高平面,转盘、井口和鼠洞均位于钻井平台地面平面;
45、人员空间位置计算模块,用于根据在所述图像数据中实时识别获取到的人员的像素坐标以及所述转换关系,计算得到钻井平台上人员的空间位置;
46、干预模块,用于当所述钻井平台上指定设备的运行位置与钻井平台上人员空间位置所对应的第一区域出现重叠时,进行声光警示并中断设备运行。
47、(三)有益效果
48、本发明的一种钻井平台空间平面的人员防碰撞方法及系统,在相机像素坐标系与钻井平台空间坐标系进行标定的过程中,摒弃常规的以棋盘格标定板或者制作单独的标定工装进行标定的方式,采用以钻井平台特有成分(转盘、井口、鼠洞)为标定参考物,无需额外标定板,较大程度减少标定操作流程、减轻标定任务负担,直接从图像像素平面到空间平面坐标转换,提高了定位精度,特别是钻井平台t高平面的设定,减少地面转换误差,优化人员定位;
49、采用集成的深度学习模型,能有效检测人员是否佩戴安全帽,确保基本安全装备到位,进一步提升了安全措施的全面性;
50、实时计算人员空间位置,结合转换关系,设立动态安全区,一旦设备接近,立即采取声光示警,保护措施,有效避免碰撞,提高了应急响应速度;
51、接收环境数据,调节相机参数,适应不同天气与照明,确保图像清晰,保持监控质量,增强了全天候适应力。
- 还没有人留言评论。精彩留言会获得点赞!