油田井下作业环境下的多尺度施工装备鲁棒性识别方法
本发明属于石油工程领域,具体涉及一种油田井下作业环境下的多尺度施工装备鲁棒性识别方法。
背景技术:
1、油气田开发过程中的井下作业是一个高风险的工作,需要高度的专业知识和技能。井下作业现场设施的智能监控可以确保工作人员的安全,及时发现井下作业现场的异常情况,从而避免事故的发生,同时提高生产效率,及时发现生产过程中的问题,从而保证生产的正常进行。
2、传统的监控方法往往存在着监控范围有限、监控效果不佳等问题,并且监控对人工依赖性非常高。因此,如何利用井场图像数据,通过深度学习的方法对井下作业现场施工装备进行检测,实时反馈井场设施的情况,对于井下作业过程人员安全保障和油气田开发正常生产具有重要意义。但是在复杂的现场环境中,设施的识别难度较大。目前,单阶段算法已经成为了目标检测的主流方法之一,但是该系列网络在井下环境中仍然存在一些缺陷,如对于小物体识别、设施遮挡等情况的适应性不足,因此难以在现场得到应用。
技术实现思路
1、为了解决上述问题,本发明提出了一种油田井下作业环境下的多尺度施工装备鲁棒性识别方法,通过对单阶段算法的改进,使其能够更好地适应井下环境中的各种复杂情况,从而提高识别的准确率和稳定性,极大地提高井下作业现场设施识别的效率,提高作业现场人员的安全性。
2、本发明的技术方案如下:
3、一种油田井下作业环境下的多尺度施工装备鲁棒性识别方法,包括如下步骤:
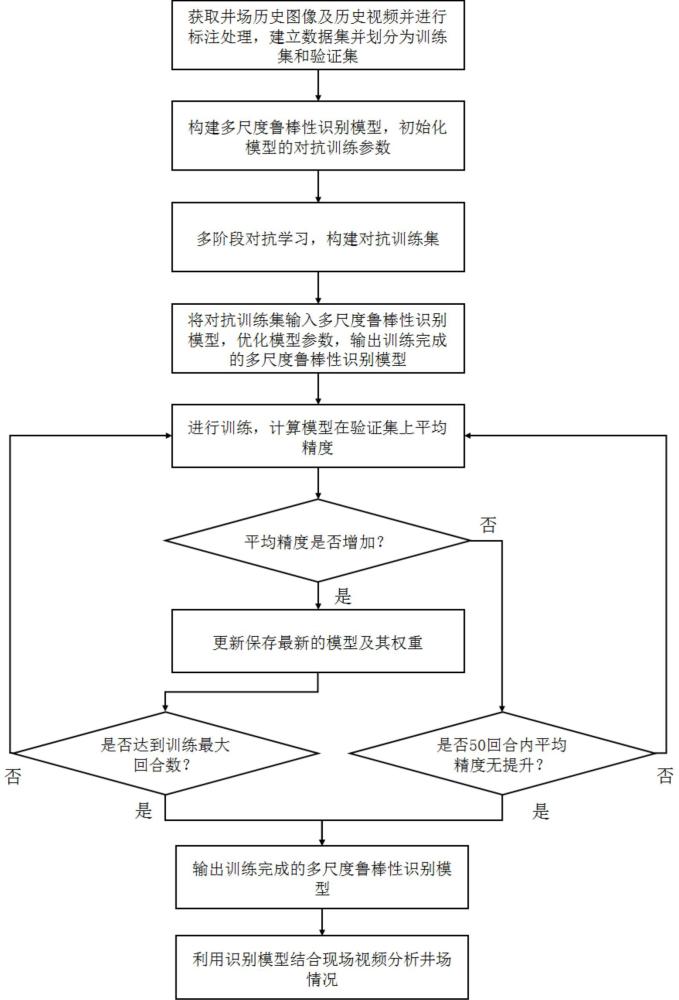
4、步骤1、获取井场历史图像及历史视频并进行标注处理,建立数据集并划分为训练集和验证集;
5、步骤2、构建多尺度鲁棒性识别模型,初始化模型的对抗训练参数;
6、步骤3、基于训练集和多尺度鲁棒性识别模型进行多阶段对抗学习,构建对抗训练集;
7、步骤4、将对抗训练集输入多尺度鲁棒性识别模型,优化模型参数,输出训练完成的多尺度鲁棒性识别模型;
8、步骤5、实时获取当前井场井下作业环境下的视频及图像数据,输入训练完成的多尺度鲁棒性识别模型获取不同施工装备的空间位置,进而进行井场情况分析。
9、进一步地,所述步骤1的具体过程为:
10、步骤1.1、采集井场井下作业环境下各个井场施工装备的各个位置视角与多种光照条件下的图像及视频,井场施工装备包含防喷器、修井车、井架、大钩、天车、储水罐、采油树、抽油机、板房、油管、猫道、套管头、管桥、吊卡、消防15种施工装备;
11、步骤1.2、将收集到的视频转为图像,视频中每间隔10帧取一张图像作为原始图像;
12、步骤1.3、采用开源软件labelimg对所有原始图像进行标注处理,将原始图像和标注信息共同构建为数据集;标注信息为每张原始图像中每种施工装备的施工装备类别索引及位置关系;
13、步骤1.4、将数据集按照训练集:验证集=0.85:0.15的比例划分为训练集和验证集。
14、进一步地,所述步骤2中,搭建的多尺度鲁棒性识别模型包括骨干部分、颈部网络、头部网络;
15、多尺度鲁棒性识别模型输入分辨率为640×640的图像,由骨干部分提取图像信息,图像首先通过两个卷积模块进行下采样,特征图分辨率转变为160×160,然后通过包含3个瓶颈层的特征融合模块进行特征提取,特征提取后通过轻量型注意力模块使注意力机制看到160×160尺度下的局部特征;再次通过卷积模块进行下采样,6个瓶颈层的特征融合模块特征提取,特征提取后通过轻量型注意力模块添加注意力机制,重复三次以后特征图分辨率转变为20×20,最后通过空间金字塔池化模块将局部特征和全局特征的进行融合,从而实现自适应尺度的输出;
16、骨干部分输出的特征图在颈部网络进行特征融合;首先将空间金字塔池化模块输出特征图通过上采样模块进行上采样,将骨干部分中分辨率为40×40的特征融合模块输出与上采样结果进行通道数相加,输出分辨率40×40融合特征图,之后经过3个瓶颈层的特征融合模块及上采样模块,输出结果与骨干部分中分辨率为80×80的特征融合模块输出通道数相加,输出分辨率80×80融合特征图,然后再依次经过3个瓶颈层的特征融合模块特征提取、卷积模块进行下采样,输出结果与分辨率40×40融合特征图对应特征融合模块输出通道数相加,输出分辨率为40×40的二次特征融合图,接着再次经过3个瓶颈层的特征融合模块特征提取、卷积模块进行下采样,输出结果与骨干部分空间金字塔池化模块输出通道数相加,输出分辨率为20×20融合特征图,最后经过3个瓶颈层的特征融合模块进行特征提取;
17、颈部网络提取特征的结果在头部网络进行识别;头部网络由三个检测头模块组成,输入分别对应80×80、40×40、20×20三种分辨率下特征融合模块输出的特征图。
18、进一步地,所述卷积模块由一个卷积层、一个批归一化层和一个silu激活函数层组成;
19、所述特征融合模块依次由第一卷积层、通道分割层、m个相同结构的瓶颈层、通道相加层和第二卷积层组成;第一卷积层和第二卷积层的结构相同,卷积核为,步长为1;每个瓶颈层均由串联的卷积核为,步长为1的两个卷积层组成;m个瓶颈层的结果在通道相加层进行通道相加;
20、所述轻量型注意力模块的公式为:
21、(1);
22、式中,为增强后的图像特征;为图像的原始特征;代表图像原始特征重要性矩阵;为sigmoid激活函数,具体表达式为;为激活函数的输入;
23、所述空间金字塔池化模块依次由第一卷积层、三个相同结构的二维最大池化层、通道相加层和第二卷积层组成;三个最大池化层依次连接,三个最大池化层的结果在通道相加层进行通道相加;第一卷积层和第二卷积层的结构相同,卷积核为,步长为1;
24、所述检测头模块使用的解耦头结构,包含分类与回归两个分支,每个分支的结构相同,每个分支依次由两个串联的卷积核为,步长为1的卷积层和一个卷积核为,步长为1的卷积层组成。
25、进一步地,所述多尺度鲁棒性识别模型将含有目标对象的图片及其边界框作为正样本,用于模型学习如何识别和定位目标;不含有目标对象或目标对象以外的区域则被标记为负样本,帮助模型学习背景与目标之间的区分能力;正负样本分配策略模型根据分类与回归的分数加权的分数选择正样本,具体为:
26、(2);
27、式中,是综合分数;是标注类别对应的预测概率;和分别用来控制预测概率和交并比对综合分数的影响程度;是预测框和真实框的交并比,如下所示:
28、(3);
29、式中,和分别代表预测框和真实框的两个对象。
30、进一步地,所述步骤2中,构建损失函数训练模型,损失函数包括分类分支损失函数与回归分支损失函数两个分支;
31、分类分支损失函数计算采用二元交叉熵,如下:
32、(4);
33、式中,是二元交叉熵损失函数值;是当前图像特征;为样本的类别属性;为模型的所有可优化参数;是总样本数;是第个样本所属类别;是第个样本的概率值;
34、回归分支损失函数计算采用分布焦点损失函数和定位损失函数,分布焦点损失函数具体为:
35、(5);
36、式中,是分布焦点损失值;、分别是第个样本、第个样本质量分数的极值;为样本质量分数的极值;
37、定位损失函数具体为:
38、(6);
39、(7);
40、式中,为eiou损失函数的值;是定位框数量;代表预测框与真实框不同属性间距的最大距离;是预测框中心点;是真实框中心点;代表覆盖预测框与真实框最小框的对角线长度;是预测框水平边;是真实框水平边;是覆盖预测框与真实框最小框的水平边长;是预测框垂直边;是真实框垂直边;是覆盖预测框与真实框最小框的垂直边长;是定位损失函数值;代表控制异常值抑制程度的参数;
41、从互联网上获取开源通用识别领域数据集coco预训练模型,得到初始化模型参数,同时随机初始化对抗扰动参数,初始化累积梯度损失。
42、进一步地,所述步骤3的具体过程为:
43、步骤3.1、将训练集输入步骤2建立的多尺度鲁棒性识别模型,计算扰动梯度下多尺度鲁棒性识别模型的梯度结果,如下所示:
44、(8);
45、(9);
46、(10);
47、式中,代表对、进行最大化正则化处理;为公式(8)约束条件,仅针对公式(4)(7)中的、两个损失函数;为当前图像特征;为不同损失函数对应的属性;为样本的类别属性;为定位框数量;为损失函数、的集合;为损失函数、对应的最大上限的集合;为最大上限的索引集合;代表模型总损失函数;代表一张图像中类别的数量;代表第个类别在该图像中的数量;为第个类别数量的序列索引;、、代表单项损失之间的不同权重系数,用以控制不同损失函数的大小关系;为添加约束后的二元交叉熵损失函数;为添加约束后的定位损失函数;为图中第个类别样本属性;为第个类别在图像中的定位框数量;代表在对抗扰动参数下的梯度损失;代表在数据集中寻找最优化参数;为对抗扰动参数的梯度计算;
48、步骤3.2、更新对抗扰动参数的梯度,经过多次循环步骤3.1迭代更新扰动:
49、(11);
50、式中,为返回某个数的符号,即代表梯度更新的方向;代表将某个数限制在范围中;为更新符号;为对抗扰动参数的阈值;
51、步骤3.3、利用最后一次更新后得到的对抗扰动参数生成对抗样本:
52、(12);
53、式中,代表生成的对抗样本集,代表训练集;
54、步骤3.4、将生成的对抗样本集添加到训练集中得到对抗训练集。
55、进一步地,所述步骤4的具体过程为:
56、步骤4.1、利用对抗训练集,对参数迭代更新:
57、(13);
58、(14);
59、(15);
60、式中,为累积梯度损失;为不考虑约束条件下的总损失函数;为单张图像中总的定位框数量;代表第个定位框的类别;代表第个定位框;为参数的梯度计算;代表在对抗训练集中寻找最优化参数;、均为超参数,分别代表衰减因子和学习率;
61、步骤4.2、将验证集输入当前回合训练好的模型进行验证,利用平均精度进行模型效果评价:
62、(16);
63、式中,代表平均精度;代表总的类别数量;和分别代表验证集在第个类别下预测的精度和召回率;代表对微分;
64、步骤4.3、将当前训练模型在验证集上的平均精度与上一回合在上的平均精度进行比较,保存效果最佳的模型参数;
65、步骤4.4、重复步骤4.1-步骤4.3,直至达到训练结束条件,保存最佳权重,具有最佳权重的模型即为训练完成的多尺度鲁棒性识别模型;训练结束条件为达到预先设定的最大训练回合数,或在训练过程中,50回合内训练模型在上平均精度没有提升。
66、本发明所带来的有益技术效果:本发明结合了注意力机制与单阶段目标检测框架,与单阶段算法相比,具有对小目标检测精度高、训练速度快等优点,可以提高作业现场设施识别的准确率和稳定性,有效地减少误判和漏检的情况,可满足井下作业对安全性的应用需求;在本发明方法中采用对抗学习的技术,进一步增强了模型的鲁棒性,使其在面对复杂、多变的工作环境时能够保持稳定的识别性能。这种方法有效提高了作业现场设施识别的准确率,为井下作业的安全保障提供了强有力的技术支持;利用井场历史图像做数据集,可快速高效训练生成现场识别的模型,基于该模型的智能监控可以实现对于整个井下作业现场设施的全面监控,从而提高监控效果和监控范围,减小大量的人力和财力耗费,对于井下作业有重要的指导意义。
- 还没有人留言评论。精彩留言会获得点赞!