基于散射中心先验信息的雷达目标识别方法、装置及设备
本发明涉及雷达目标识别,特别是涉及一种基于散射中心先验信息的雷达目标识别方法、装置及设备。
背景技术:
1、雷达能够在非理想探测条件下稳定地工作,而且具有非接触的优势,因此,雷达成为自动目标识别领域一种重要的传感器。高分辨率距离像(high resolution rangeprofile,hrrp)能够反映被测目标散射点沿雷达视线方向的分布情况,蕴含了被测目标很多物理特性,例如,散射点分布,散射中心的位置和强度,目标的大小等。因此,基于hrrp的雷达目标识别方法近年来受到越老越多的研究者关注,成为雷达目标识别领域的热点问题。
2、随着深度学习技术的发展,大量基于深度学习技术的hrrp目标识别方法被提出。基于此,hrrp目标识别方法可以大致分为两类,一类是传统hrrp目标识别方法,即没有利用深度学习技术,另一类是基于深度学习的方法,即基于深度学习技术进行hrrp目标识别。传统hrrp目标识别方法可以被大致分为三部分,分别是数据预处理,特征提取和分类器设计。传统方法的优势在于提取的特征具有明确的物理含义,使得人们可以很容易地根据所提取的特征对识别结果进行解释。然而,传统方法的浅层结构限制了其识别性能的提高,导致识别准确率通常较低。一般的基于深度学习的hrrp目标识别方法通过巧妙地设计神经网络结构,将数据预处理,特征提取和分类器设计融合成为一个整体模型。因此,这些模型能够充分利用大数据进行端到端的训练,实现自动提取目标特征,并取得了较高的识别准确率。然而,基于深度学习的hrrp目标识别方法提取的特征缺乏明确的物理含义,使得人们很难对其识别结果进行解释,这也让这些方法成为了深受诟病的“黑盒”模型。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高雷达目标识别准确率的基于散射中心先验信息的雷达目标识别方法、装置及设备。
2、一种基于散射中心先验信息的雷达目标识别方法,所述方法包括:
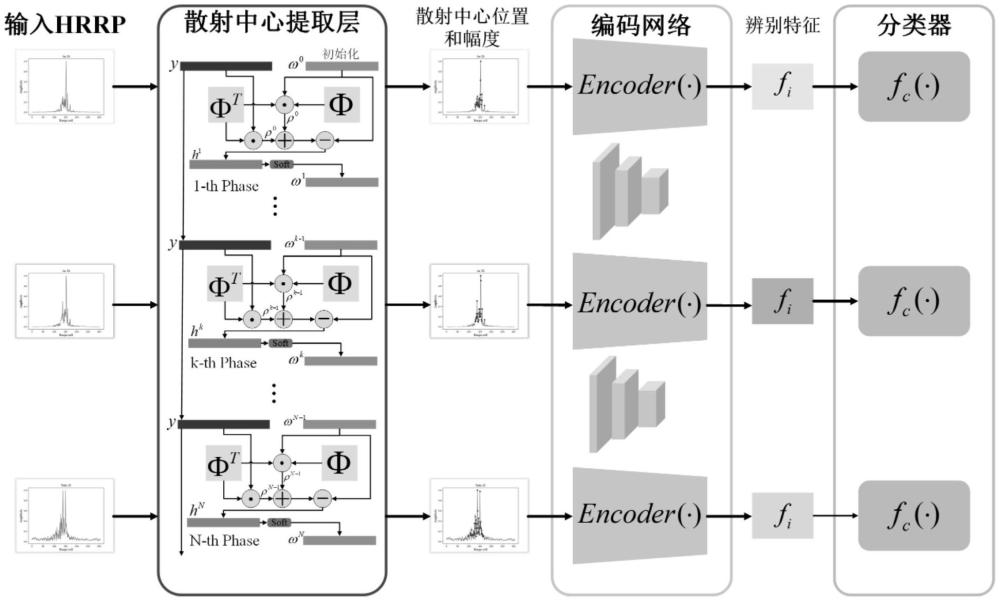
3、构建散射中心目标识别网络。散射中心目标识别网络包括:散射中心提取层、编码网络以及分类器。
4、通过散射中心提取层提取hrrp目标图像的散射相关信息。散射相关信息至少包括当前散射特征点在hrrp目标图像中的散射中心位置与散射中心幅度信息。
5、将散射相关信息输入至编码网络进行特征空间的映射,得到待优化辨别特征点。
6、将待优化辨别特征点输入至分类器进行特征分类,得到辨别特征点。
7、根据散射相关信息与辨别特征点进行梯度反向训练,得到训练好的散射中心目标识别网络。
8、在其中一个实施例中,还包括:通过雷达接收器接收被测目标在通信基带中传输的回波信号:
9、
10、其中,l=1,2,3,…l为第n个距离单元中第l个单独的散射中心,为雷达发射器的发射信号,a(l)为相关的散射系数,n=1,2,3,…n为距离单元的数量,rl为雷达与第n个距离单元中第l个单独的散射中心的径向距离,为宽度为tp的矩形脉冲,fc为雷达中心频率,μ为线性调频系数,c为电磁波的传播速度;
11、计算回波信号的离散频率响应:
12、
13、其中,r(m)为第m个频率响应,m∈{1,2,3,…,m}为频率响应的数量,δf为频率间隔,ω(n)为第n个距离单元的散射系数。离散频率响应经傅里叶变换生成散射中心提取模型:
14、
15、φ=[φ(r1),φ(r2),…,φ(rn)]
16、
17、其中,ω*为最优稀疏编码,ω=[ω(1),ω(2),…,ω(n)]t为散射系数,φ为傅里叶基。
18、在其中一个实施例中,还包括:通过散射中心提取层的散射中心提取模型提取hrrp目标图像中强散射中心响应的散射系数,散射系数根据软阈值迭代法在散射中心提取层进行优化,得到最优稀疏编码对应的散射相关信息。
19、在其中一个实施例中,还包括:将散射相关信息输入至编码网络,编码网络采用单通道resnet网络结构将散射相关信息映射至待优化的特征空间,得到待优化辨别特征点。
20、在其中一个实施例中,还包括:将待优化辨别特征点输入至分类器,分类器采用softmax函数与预设的分类损失函数对待优化辨别特征点进行特征分类,得到辨别特征点。
21、在其中一个实施例中,还包括:根据散射相关信息与辨别特征点重构误差损失函数,并将散射相关信息作为先验信息与辨别特征点进行收敛,将收敛后的辨别特征点作为待优化辨别特征点输入散射中心目标识别网络中,得到训练好的散射中心目标识别网络。
22、在其中一个实施例中,还包括:根据散射相关信息重构散射相关信息的提取损失函数:
23、
24、其中,xi为hrrp目标图像,i∈i为hrrp目标图像的索引,i为hrrp目标图像的数量,φ为傅里叶基,ω*为最优稀疏编码。以及根据辨别特征点重构分类损失函数:
25、
26、其中,i∈i为hrrp目标图像的索引,i为hrrp目标图像的数量,k=1,2,…,c为hrrp目标图像的类别,c为hrrp目标图像的类别数量,yi为hrrp目标图像xi的类别标签,fik为属于类别k的hrrp目标图像xi的辨别特征点;根据提取损失函数与分类损失函数重构散射中心目标识别网络的误差损失函数:
27、
28、其中,xi为hrrp目标图像,i∈i为hrrp目标图像的索引,i为hrrp目标图像的数量,φ为傅里叶基,ω*为最优稀疏编码,k=1,2,…,c为hrrp目标图像的类别,c为hrrp目标图像的类别数量,yi为hrrp目标图像xi的类别标签,fik为属于类别k的hrrp目标图像xi的辨别特征点。
29、一种基于散射中心先验信息的雷达目标识别装置,所述装置包括:
30、网络构建模块,用于构建散射中心目标识别网络。散射中心目标识别网络包括:散射中心提取层、编码网络以及分类器。
31、散射相关信息提取模块,用于通过散射中心提取层提取hrrp目标图像的散射相关信息。散射相关信息至少包括当前散射特征点在所述hrrp目标图像中的散射中心位置与散射中心幅度信息。
32、待优化辨别特征点获取模块,用于将散射相关信息输入至编码网络进行特征空间的映射,得到待优化辨别特征点。
33、特征点优化模块,用于将待优化辨别特征点输入至分类器进行特征分类,得到辨别特征点。
34、识别优化训练模块,用于根据散射相关信息与辨别特征点进行梯度反向训练,得到训练好的散射中心目标识别网络。
35、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
36、构建散射中心目标识别网络。散射中心目标识别网络包括:散射中心提取层、编码网络以及分类器。
37、通过散射中心提取层提取hrrp目标图像的散射相关信息。散射相关信息至少包括当前散射特征点在hrrp目标图像中的散射中心位置与散射中心幅度信息。
38、将散射相关信息输入至编码网络进行特征空间的映射,得到待优化辨别特征点。
39、将待优化辨别特征点输入至分类器进行特征分类,得到辨别特征点。
40、根据散射相关信息与辨别特征点进行梯度反向训练,得到训练好的散射中心目标识别网络。
41、上述基于散射中心先验信息的雷达目标识别方法、装置及设备,构建的散射中心目标识别网络为神经网络,其中,编码网络和分类器部分实现了端到端的训练,并且通过散射中心提取层从hrrp目标图像中提取散射相关信息,这些信息经过编码网络的特征空间映射,最终输入分类器进行分类。虽通过散射相关信息的提取和网络结构的设计,可以提取hrrp目标图像特征的物理含义,在一定程度上提高散射中心目标识别网络的可解释性。例如,可以通过分析散射中心位置、幅度信息等,来解释神经网络对目标特征的识别依据,降低了模型作为“黑盒”的负面影响。加之,将散射相关信息作为先验信息驱动散射中心目标识别网络,通过使用散射相关信息和辨别特征点进行梯度反向训练,可以不断调整网络参数,使网络适应不同目标的特征,进一步提高雷达对目标识别的准确性。
- 还没有人留言评论。精彩留言会获得点赞!