一种移动涡结构自动跟踪环量计算方法
本发明涉及涡结构环量计算,具体涉及一种移动涡结构自动跟踪环量计算方法。
背景技术:
1、在研究和应用低速飞行器或水下潜航器的动力推进过程中,特别是在仿生技术中模仿鸟类扑翼、鱼类摆动、水母射流等方式设计飞行器或水下潜航器时,可以通过分析其产生的尾迹中关键涡结构的环量,间接推算推进器的推力和推进效率等关键特征,从而解决柔性变体推进器近壁面的流场难以测量导致移动推进器产生的推力难以直接测量等问题。涡结构的环量是对涡量场中涡结构所对应区域的涡量进行面积分得到的。然而,在计算尾迹中关键涡结构的环量时,必须面对涡结构随着流场发展不断运动、受到流场剪切力影响而变形、周边存在其他涡结构等复杂因素。
2、因此,在处理动态演化的涡结构尾迹时,需要逐帧采样涡量场,以人工确定目标涡结构的位置和边界,这导致了大量的人力和物力消耗,同时也降低了测试采样的频率。涡结构的动态演化是一个挑战性的问题,因为涡在流场中的运动是不断变化的,而且周围的流体环境也在不断变化。因此,在处理涡结构时,需要开发一种自动化数据处理方法,减少人工干预的需求,在采集到的涡量场图像中识别和跟踪目标涡结构,并结合涡边界判据所需要关注涡结构在涡量场中对应的区域以计算得到涡结构的环量。
3、现有移动涡结构的环量自动跟踪计算技术主要是基于计算机视觉技术结合经典跟踪算法,具有较高的技术复杂度且对后处理算力要求较高,其典型技术过程如下:①将目标二维平面的涡量分布转换为涡量云图并在每采样帧输出对应的图片,针对连续帧的图片基于图像识别进行移动涡核心区域的自动识别跟踪,并计算随时间变换的环量。②进行边缘检测,利用sobel算子、canny等算法识别图像中的边界,旨在识别图像中的边界或变化较大的区域,这些区域可能对应着涡结构的边界。然后通过连通区域分析确定可能的涡结构区域,即具有相似属性(如颜色、灰度值等)且相邻的像素点所构成的区域。在联通区域的确定过程需要人工干预以确定所关注涡结构对应的区域。③进行特征提取,包括对区域的形状、纹理、颜色、灰度等特征的提取和描述。常用的特征提取方法包括哈尔特征、方向梯度直方图(hog)、局部二值模式(lbp)等。④最后利用跟踪算法如卡尔曼滤波器、均值漂移等跟踪涡结构在连续帧图像中的运动和变化。
技术实现思路
1、针对上述背景技术当中提出的缺陷,本发明提供一种移动涡结构自动跟踪环量计算方法的技术方案内容,包括如下的环量计算流程:
2、s1:定义两个坐标矩阵以统一全局的位置信息,即代表离散到二维矩阵空间的每个点的物理位置,即n行m列的x与y矩阵:
3、
4、s2:根据x,y矩阵,将二维平面的涡量分布插值为n行m列的v矩阵;利用统一的x,y矩阵插值形成v矩阵与q矩阵,将使得上述四个矩阵的相同索引对应于同一物理空间位置,关联各矩阵中元素;
5、s3:考虑方法的连续计算,将输入x,y矩阵,以及连续采样n次的v矩阵与q矩阵,分别为编号为v1,v2,……,vn-1,vn矩阵,q1,q2,……,qn-1,qn矩阵;
6、s4:对需要人工干预的采样第1帧进行计算;首先是识别涡结构,将q矩阵二值化,即大于阈值的区域标记为1,小于阈值的部分标记为0,从而得到了可能存在几个块状分布的值为1的区域;针对每个区域进行从1开始的编号,并将其编号赋值到对应块状分布的值为1的区域,得到标记矩阵l;将人工干预输入需要识别跟踪的涡核心区域的编号ln,结合标记矩阵,方法将获得第1帧采样时需要识别跟踪的涡核心区域包含离散点在矩阵的索引序列index,在统一的x与y位置矩阵插值的条件下,即通过index获得涡量矩阵中对应涡核心区域的涡量情况,索引序列通过矩阵形式存储,第一行元素为涡核心区域包含离散点在矩阵的行索引,第二行元素为涡核心区域包含离散点在矩阵的列索引:
7、
8、由此通过离散面积分计算得到涡核心所对应的环量,即将涡量v矩阵中对应索引序列index的所有元素求和,与单一元素对应物理空间面积da相乘,然后保存为γ1:
9、γ=sum(v(index))*da
10、同时,保存记录涡核心区域内涡量幅值的最高点所对应的索引,行索引i,列索引j;
11、s5:在第2帧到第n帧的移动涡结构的自动跟踪及环量计算过程中,将根据上一帧所得的涡核心区域内涡量幅值的最高点的索引确定在标记矩阵l中需要识别跟踪的涡核心区域的编号ln,由此实现对移动涡结构的自动跟踪。
12、在上述一种移动涡结构自动跟踪环量计算方法的技术方案中,优选地,所述步骤s2当中的将二维平面的涡量分布插值为n行m列的v矩阵过程中,还包括但不限于引入q准则涡核心区域识别方法,q值的定义为速度梯度张量的第二不变量,结合阈值的设定,认为当q值大于阈值的区域为涡核心区域,同样将q值插值形成n行m列的q矩阵。
13、在上述一种移动涡结构自动跟踪环量计算方法的技术方案中,优选地,所述步骤s5的自动跟踪及环量计算过程中,其主要基于涡核心区域内的涡量分布近高斯分布,涡核心区域内涡量幅值的最高点一般均处于涡核心区域的中间位置,且这一点不受涡结构随着流场发展不断运动、受到流场剪切力影响而变形、周边存在其他涡结构等复杂因素的影响,且在较短取样时间间隔内,涡核心区域内涡量幅值的最高点的位移变化有限,远小于涡核心区域的特征尺寸。
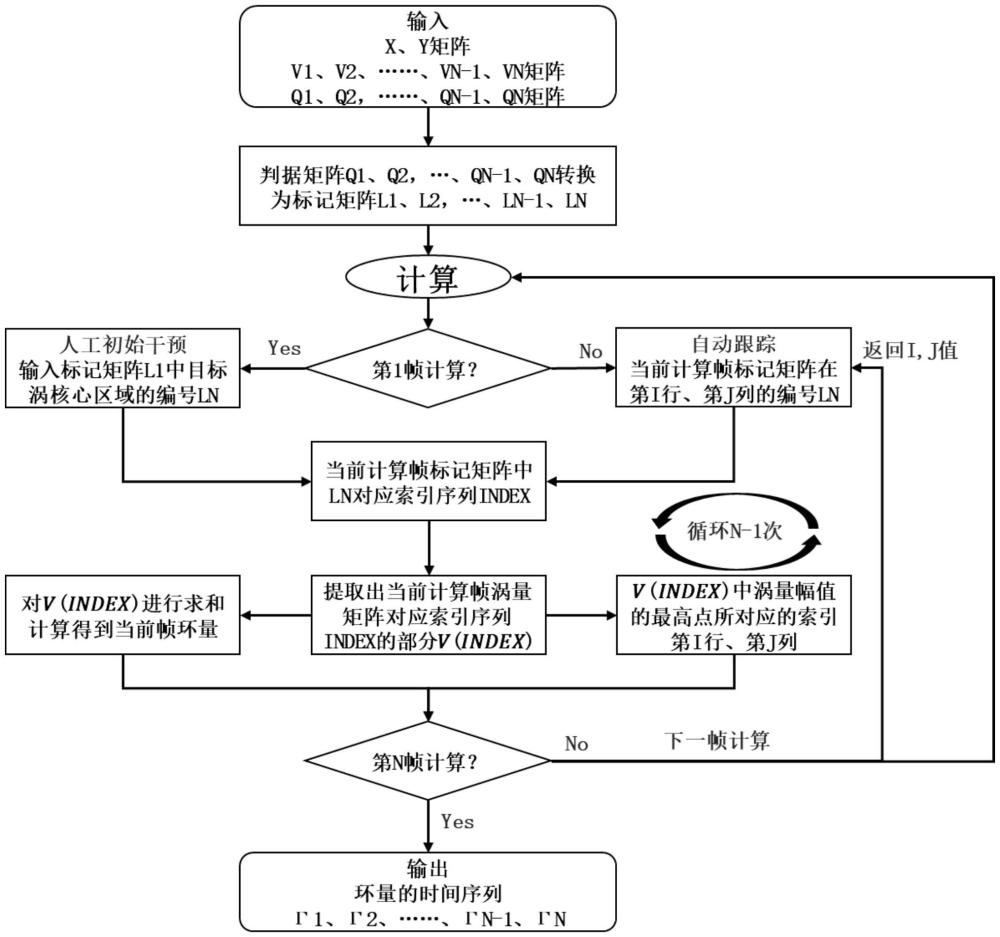
14、在上述一种移动涡结构自动跟踪环量计算方法的技术方案中,优选地,所述步骤s5当中的第2帧到第n帧的移动涡结构的自动跟踪及环量计算过程具体有:
15、步骤一:输入x、y矩阵,v1、v2、……、vn-1、vn矩阵、q1、q2、……、qn-1、qn矩阵;
16、步骤二:判据q1、q2、……、qn-1、qn转换为标记矩阵l1、l2、…、ln-1、ln;
17、步骤三:若是第一帧计算采用人工初始干预,输入标记矩阵l1中目标涡核心区域的编号ln,获得当前计算帧标记矩阵中ln对应索引序列index;
18、步骤四:提取出当前计算帧涡量矩阵对应索引序列index的部分v,并对v进行求和计算得到当前帧环量,以及保存记录涡核心区域内涡量幅值的最高点所对应的索引第i行,第j列;
19、步骤五:若非第一帧计算,自动跟踪当前计算帧标记矩阵在第i行,第j列的编号ln,并获得当前计算帧标记矩阵中ln对应索引序列index,且转入步骤四进行;
20、步骤六:在获得当前帧环量以及涡核心区域内涡量幅值的最高点所对应的索引第i行,第j列信息后,判断是否为第n帧计算,若否定结果则返回i、j值到自动跟踪步骤;若肯定结果则输出环量的时间序列:γ1、γ2、……、γn-1、γn。
21、在上述一种移动涡结构自动跟踪环量计算方法的技术方案中,优选地,所述步骤s5当中,当获取得到了需要识别跟踪的涡核心区域的编号ln后,环量的计算过程则将与第1帧计算过程相同,计算出第2到第n帧的环量γ2、……、γn-1、γn。
22、由上述技术方案可知,本发明提供一种移动涡结构自动跟踪环量计算方法与现有技术相比,本发明具有以下有益效果:
23、①相较于人工确定目标涡结构的位置和边界后再进行环量计算的繁琐过程,这一方法将人工干预降至最低程度,操作人员仅需在第一个采样帧中指定所关注的涡结构,然后等待涡结构环量的时变过程数据的输出即可。
24、②相较于现有的移动涡结构环量自动跟踪计算技术,新方法采用了基于涡核心区域内的涡量分布特征设计的自动跟踪识别方法。这种创新方法摒弃了复杂的边缘检测算法、图像特征提取以及图像跟踪算法的需求。相反,它专注于涡核心区域内的涡量分布,将其作为关键特征,从而极大地简化了计算流程。
25、③新方法不再依赖于繁琐的图像处理和跟踪技术,因此大幅降低了对计算资源的需求。这种优化使得在瞬态演化过程中涡结构的环量计算变得更加高效。通过减少对算力的需求,实现了环量计算过程的加速,从而使涡结构演化的跟踪和分析更加迅速和精确。
26、④基于二维矩阵的处理思路,而非采用单一的图像识别计算,使得引入涡量外更为先进的涡核心区域识别方法,如q准则等,具备了可行性。
27、⑤根据二维矩阵设计的二维平面内涡核心区域的自动跟踪识别涡结构计算环量的方法,可以通过从二维矩阵到三维矩阵的表示,拓展该方法到三维涡结构位置及形状的自动跟踪识别。
- 还没有人留言评论。精彩留言会获得点赞!