一种基于物联网的智慧叉车监控管理系统及方法与流程
本发明涉及叉车监控管理,具体是一种基于物联网的智慧叉车监控管理系统及方法。
背景技术:
1、叉车作为物流行业主要的起重搬运设备,得到了广泛运用,在叉车作业过程中若没有及时到位的监控管理可能会出现货物掉落的情况甚至造成安全事故,因此,在叉车作业过程中需要对叉车的运行数据进行实时监控和管理以提高叉车作业的安全性;
2、叉车超载现象是造成叉车作业过程中出现货物掉落甚至造成安全事故的主要因素之一,因此需要对这种现象进行及时管控,然而,现实生活中,也会发生在叉车载荷接近最大载荷值时由于一些外在原因导致在运输过程中出现货物掉落的状况,此时叉车并未超载,然而,现有技术一般在叉车超载后才进行预警,未对这种状况进行预判,进而无法降低叉车未超载搬运货物过程中发生货物掉落的概率并提升叉车作业的安全性。
3、所以,人们急需一种基于物联网的智慧叉车监控管理系统及方法来解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种基于物联网的智慧叉车监控管理系统及方法,以解决现有技术中提出的问题。
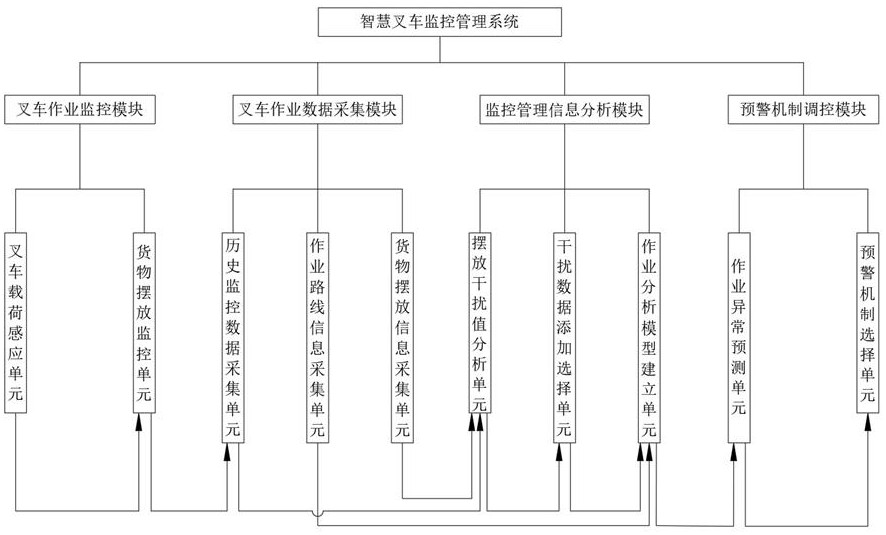
2、为实现上述目的,本发明提供如下技术方案:一种基于物联网的智慧叉车监控管理系统,包括:叉车作业监控模块、叉车作业数据采集模块、监控管理信息分析模块和预警机制调控模块;
3、所述叉车作业监控模块用于进行叉车作业载荷监控和货物摆放监控;
4、所述叉车作业数据采集模块用于采集不同作业路线上的叉车作业历史监控数据;
5、所述监控管理信息分析模块用于提取货物摆放轮廓,分析货物摆放对叉车作业的干扰值,筛选出需要添加进训练样本数据中的干扰值,依据训练样本数据建立第一作业分析模型和第二作业分析模型;
6、所述预警机制调控模块用于对当前叉车作业进行监控,预测当前进行叉车作业异常的概率,选择是否进行作业异常预警并调控不同的预警机制。
7、进一步的,所述叉车作业监控模块包括叉车载荷感应单元和货物摆放监控单元;
8、所述叉车载荷感应单元用于通过称重传感器监控并感应叉车的实际载荷,叉车上安装有称重传感器,叉车的实际载荷指的是叉车实际承受的货物总重量;
9、所述货物摆放监控单元用于利用监控摄像头拍摄以往搬运货物完成后叉车上摆放的货物图像信息;
10、所述叉车作业数据采集模块包括历史监控数据采集单元、作业路线信息采集单元和货物摆放信息采集单元;
11、所述历史监控数据采集单元用于采集以往监控到的叉车实际载荷历史数据、搬运相同载荷货物的总次数以及搬运相同载荷的货物时出现货物掉落的次数数据,采集到的历史数据中叉车实际载荷都未超出叉车所能承受的载荷最大值;
12、所述作业路线信息采集单元用于采集叉车的历史作业路线,将不同的历史作业路线进行编号,所述历史作业路线指的是叉车从搬运货物的地点到卸下货物的地点所移动的路线,搬运货物的地点为路线起点,卸下货物的地点为路线终点;
13、所述货物摆放信息采集单元用于采集通过监控摄像头拍摄到的以往搬运货物完成后叉车上摆放的货物图像信息,拍摄图像时货物已摆放到叉车上且叉车未开始移动,监控摄像头面向叉车驾驶员拍摄图像。
14、进一步的,所述监控管理信息分析模块包括摆放干扰值分析单元、干扰数据添加选择单元和作业分析模型建立单元;
15、所述摆放干扰值分析单元用于从拍摄到的货物图像中提取叉车上所摆放货物的轮廓,从提取到的轮廓上随机选择一个点作为起点,从选择的起点开始按顺时针方向依次连接相邻的轮廓点组成用于描绘货物摆放形状的n边形,将n边形剖分为若干个三角形,获取三角形的重心点位置,依据若干个三角形的重心点位置分析n边形的中心点,计算中心点到中心线的距离,所述中心线指的是以连接叉车的两个货叉的线段中点为起点且垂直于对应线段的射线,所述中心线垂直于地面,所述线段与货叉相互垂直,依据计算得到的距离分析货物摆放对叉车作业的干扰值;
16、所述干扰数据添加选择单元用于比较以往不同次在同一编号的路线上进行货物搬运时货物摆放对叉车作业的干扰值,设置干扰阈值,筛选出大于干扰阈值的干扰值作为待添加训练数据;
17、所述作业分析模型建立单元用于调取以往在同一编号路线上搬运相同载荷货物的总次数以及搬运相同载荷的货物时出现货物掉落的次数,分析货物摆放对叉车作业的干扰值大于干扰阈值时叉车作业异常的概率作为第一概率,分析货物摆放对叉车作业的干扰值未超出干扰阈值时叉车作业异常的概率作为第二概率,生成第一作业分析模型的训练数据为载荷、干扰值和第一概率,生成第二作业分析模型的训练数据为载荷和第二概率,依据训练数据分别建立第一作业分析模型和第二作业分析模型。
18、进一步的,所述预警机制调控模块包括作业异常预测单元和预警机制选择单元;
19、所述作业异常预测单元用于获取当前进行货物搬运时叉车的实际载荷和当前货物摆放对叉车作业的干扰值,若干扰值大于干扰阈值,将当前的实际载荷和干扰值代入第一作业分析模型;若干扰值未超出干扰阈值,将当前的实际载荷代入第二作业分析模型,预测当前进行叉车作业异常的概率,设置叉车作业警报值,在预测得到的概率大于叉车作业警报值时进行作业异常预警;
20、所述预警机制选择单元用于在干扰值未超出干扰阈值且预测得到当前进行叉车作业异常的概率大于叉车作业警报值时,选择预警机制为:发出叉车作业异常警报信号提示相关人员减少叉车当前的载荷;在干扰值大于干扰阈值且预测得到当前进行叉车作业异常的概率大于叉车作业警报值时,选择预警机制为:发出叉车作业异常警报信号提示相关人员减少叉车当前的载荷或摆正叉车上的货物。
21、一种基于物联网的智慧叉车监控管理方法,包括以下步骤:
22、s1:进行叉车作业载荷监控和货物摆放监控并采集历史监控数据;
23、s2:提取货物摆放轮廓,分析货物摆放对叉车作业的干扰值;
24、s3:筛选出需要添加进训练样本数据中的干扰值,依据训练样本数据建立第一作业分析模型和第二作业分析模型;
25、s4:对当前叉车作业进行监控,预测当前进行叉车作业异常的概率,在概率异常时进行作业异常预警并调控不同的预警机制。
26、进一步的,在s1中:通过称重传感器监控并感应叉车的实际载荷,采集以往监控到的叉车实际载荷,采集到叉车以往搬运不同载荷货物的总次数,采集以往搬运不同载荷货物时出现货物掉落的次数,采集到叉车的历史作业路线共有c条,为不同的历史作业路线设置编号为1,2,…,c,采集通过监控摄像头拍摄到的以往搬运货物完成后叉车上摆放的货物图像。
27、进一步的,在s2中:从拍摄到的货物图像中提取叉车上所摆放货物的轮廓,从提取到的轮廓上随机选择一个点作为起点,从选择的起点开始按顺时针方向依次连接相邻的轮廓点组成用于描绘货物摆放形状的n边形,将n边形剖分为若干个三角形,获取三角形的重心点位置,获取到将随机一个拍摄到的货物图像中的n边形共被剖分为f个三角形,以图像中心为原点建立二维坐标系,获取到f个三角形的重心点位置坐标集合为{(a1,b1),(ai,bi),…(af,bf)},m个三角形的面积集合为{s1,si,…sf},根据a=[∑fi=1(ai*si)]/[∑fi=1(si)]和b=[∑fi=1(bi*si)]/[∑fi=1(si)]分别计算得到随机一个拍摄到的货物图像中的n边形的中心点横坐标a和纵坐标b,计算得到对应中心点到中心线的距离为dj,中心点投影在中心线上,因此距离的计算方式与点到直线的求解方式一致,此处的直线表示中心线所在直线,得到叉车以往在编号为c的路线上进行货物搬运时拍摄到的所有货物图像中的n边形的中心点到中心线的距离集合为d={d1,d2,…dj,…dr},其中,r表示图像数量,根据公式wj=dj/[∑rj=1(dj)]计算随机一个图像中的货物摆放对叉车作业的干扰值wj,得到所有图像中的货物摆放对叉车作业的干扰值,将干扰值按从小到大的顺序进行排列,得到排列后的干扰值集合为w={w1,w2,…wj,…wr}。
28、进一步的,在s3中:将排列后的干扰值随机分为m类,其中,前一类中所有的干扰值都小于后一类,获取到随机一个分类结果中m类中每一类的干扰值均值集合为w={w1,w2,…we,…wm},根据c=[(∑me=1(we-(∑me=1(we)/m))2)/m]1/2计算随机一个分类结果的优度c,计算并比较不同分类结果的优度,筛选出优度最高的分类结果为目标分类结果,从目标分类结果中筛选出处于第一类的干扰值,将处于第一类的干扰值中的最大干扰值作为干扰阈值,得到干扰阈值为w’,筛选出大于w’的干扰值集合为f={f1,f2,…,fg},g表示大于w’的干扰值项数,将筛选出的干扰值作为待添加训练数据。
29、进一步的,调取到以往货物摆放对叉车作业的干扰值为集合f内的干扰值时叉车的实际载荷集合为q={q1,q2,…,qg},以往在编号为c的路线上进行货物搬运时搬运载荷为qu的货物的总次数为j,在搬运载荷为qu的货物时出现货物掉落的次数为h,得到叉车以往在编号为c的路线上搬运载荷为qu的货物时叉车作业异常的概率为pu=h/j,计算得到叉车以往在编号为c的路线上搬运集合q内载荷对应的货物时叉车作业异常的概率集合作为第一概率集合,第一概率集合为p={p1,p2,…pu,…pg},生成第一训练数据样本为{(q1,f1,p1),(qu,fu,pu),…(qg,fg,pg)},对第一训练数据样本进行拟合后建立第一作业分析模型:
30、z=γ1*x+γ2*y+γ0;
31、其中,γ1、γ2和γ0表示第一作业分析模型的拟合系数,调取到以往货物摆放对叉车作业的干扰值为未超出w’的干扰值时叉车的实际载荷集合为q={q1,q2,…,qk},k表示集合q内的载荷项数,得到叉车以往在编号为c的路线上搬运集合q内载荷对应的货物时叉车作业异常的概率集合作为第二概率集合,第二概率集合为p={p1,p2,…pk},生成第二训练数据样本为{(q1,p1),(q2,p2),…(qk,pk)},对第二训练数据样本进行拟合后建立第二作业分析模型:
32、y=d1*x+d2;
33、其中,d1和d2表示第二作业分析模型的拟合系数;
34、通过拍摄叉车上摆放货物的图像并对图像进行分析的方式分析货物摆放对叉车作业的干扰值,将货物摆放轮廓描绘为一个多边形,并对多边形进行剖分为规则图形后分析多边形的中心点,将之作为货物摆放轮廓的中心点,进一步通过计算中心点到中心线的距离分析货物摆放对叉车作业的干扰值,距离越大,判断货物摆放地越不正,越容易在运输过程中出现掉落情况,则干扰值越大,预先分析货物摆放干扰值的目的在于考虑到部分历史监控数据中货物摆放对叉车作业可能干扰极微小,可能仅仅因为叉车载荷以及对应路线上的颠簸程度导致货物掉落,这种情况无须考虑货物摆放,预先筛除出这种数据,分为两种训练样本数据,分别为加入干扰值和未加入干扰值的训练样本,分别对两种训练样本数据进行拟合后建立两个作业分析模型,提高了参照模型预测叉车作业异常概率的准确度。
35、进一步的,在s4中:监控到当前需要在编号为c的路线上进行货物搬运时叉车的实际载荷为l,当前叉车上的货物摆放对叉车作业的干扰值为v,比较v和w’:若v>w’,将l和v代入第一作业分析模型:令x=l、y=v,预测得到当前进行叉车作业异常的概率为γ1*l+γ2*v+γ0,设置叉车作业警报值为n,若γ1*l+γ2*v+γ0>n,进行作业异常预警,选择预警机制为:发出叉车作业异常警报信号提示相关人员减少叉车当前的载荷或摆正叉车上的货物;若v≤w’,将l代入第二作业分析模型:令x=l,预测得到当前进行叉车作业异常的概率为d1*l+d2,若d1*l+d2>n,进行作业异常预警,选择预警机制为:发出叉车作业异常警报信号提示相关人员减少叉车当前的载荷;
36、在两个模型建立完成后,监控当前货物摆放情况和叉车载荷数据,预先对当前货物摆放情况进行分析,依据分析结果判断将当前数据代入哪个模型中进行概率预测,在预测到叉车作业异常概率超出警报值后进行预警,并采取不同的预警机制,在叉车未超载时对可能出现货物掉落的情况进行预判,降低了叉车未超载搬运货物过程中发生货物掉落的概率,进而提升了叉车作业的安全性,采取不同的预警机制降低了相关人员收到预警信息并对叉车作业进行合适地调整后再发生货物掉落的概率。
37、与现有技术相比,本发明的有益效果是:
38、通过大数据技术采集并分析叉车作业历史监控数据,针对不同情况建立用于叉车作业异常判断的第一作业模型和第二作业模型,在两个模型建立完成后,监控当前货物摆放情况和叉车载荷数据,预先对当前货物摆放情况进行分析,依据分析结果判断将当前数据代入哪个模型中进行概率预测,在预测到叉车作业异常概率超出警报值后进行预警,并采取不同的预警机制,在叉车未超载时对可能出现货物掉落的情况进行预判,降低了叉车未超载搬运货物过程中发生货物掉落的概率,进而提升了叉车作业的安全性,采取不同的预警机制降低了相关人员收到预警信息并对叉车作业进行合适地调整后再发生货物掉落的概率。
- 还没有人留言评论。精彩留言会获得点赞!