本技术涉及工程施工,具体涉及一种施工设备智能调度方法以及智能调度系统。
背景技术:
1、目前露天矿山开采和土方施工时,运输车需要到挖机旁边进行装料,而装料完成后要到对应的卸料区卸料。不同的装料类型有不同的卸料区域,如矿石要到矿石区卸料,渣土要到矿渣区卸料。因此,作为对各个施工设备(例如运输车等)的调度的矿山施工设备的调度是矿山工程中的一项关键任务,它涉及对各类设备的有效组织、协调和优化,以确保施工过程的顺利进行。
2、目前,矿山施工设备(例如挖掘机、运输车)等的调度往往由人工根据经验进行调度,效率低且容易出错。
3、为了提高效率,采用机器算法系统等辅助人工对设备进行调度,但是机器算法多是利用当前工作情况的监测数据,并采用简单的判断逻辑规则来调度施工设备,但是在实际应用时受限于人为因素,落地性较差。且缺乏对未来情况的预测方式,难以获取全局最优的调度方案。
技术实现思路
1、有鉴于此,本技术提供了一种施工设备智能调度方法以及智能调度系统,解决或改善了现有技术中矿山施工设备调度受限于人为因素,落地性较差,且缺乏对未来情况的预测方式,难以获得全局最优的调度方案技术问题。
2、作为本技术的第一方面,本技术提供了一种施工设备智能调度方法,包括:
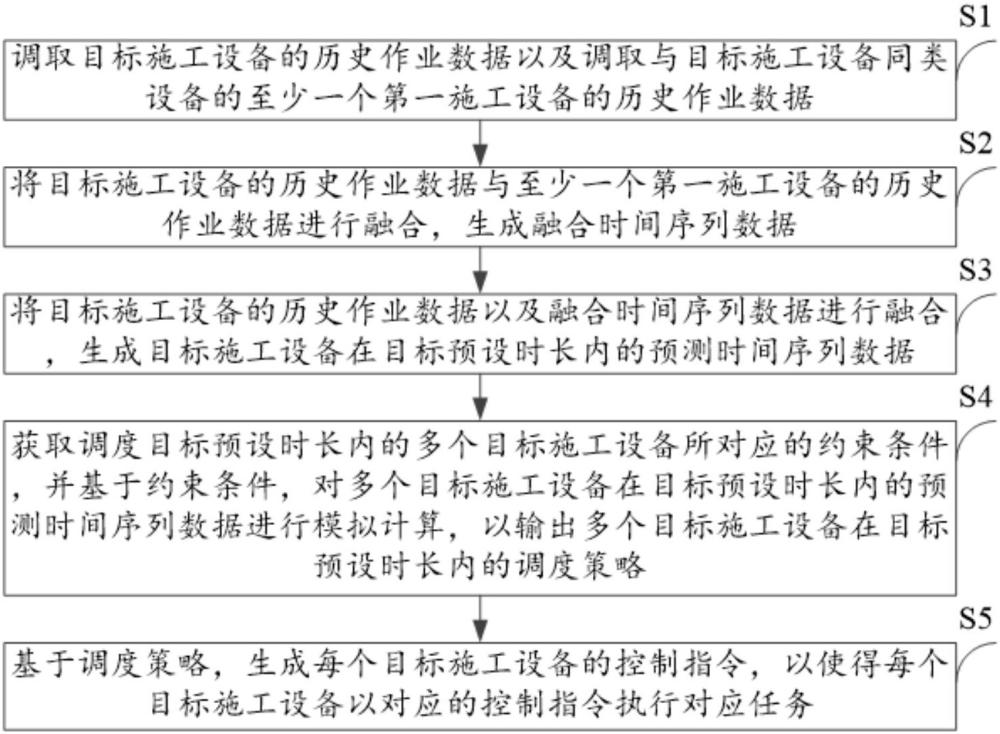
3、调用目标施工设备的历史作业数据以及调用与所述目标施工设备同类设备的至少一个第一施工设备的历史作业数据,其中,所述历史作业数据包括多个历史预设时长以及在所述历史预设时长内施工设备的历史时间序列数据,所述历史时间序列数据包括按照时间序列排列的时间点以及所述时间点对应的工况数据;将所述目标施工设备的历史作业数据与至少一个第一施工设备的历史作业数据进行融合,生成融合时间序列数据;将所述目标施工设备的历史作业数据以及所述融合时间序列数据进行融合,生成所述目标施工设备在目标预设时长内的预测时间序列数据;获取调度目标预设时长内的多个目标施工设备所对应的约束条件,并基于所述约束条件,调用所述运筹优化求解器对多个目标施工设备在目标预设时长内的预测时间序列数据进行模拟计算,以输出多个目标施工设备在所述目标预设时长内的调度策略;以及基于所述调度策略,生成每个目标施工设备的控制指令,以使得每个目标施工设备以对应的控制指令执行对应任务。
4、在本技术一种可能的实现方式中,将所述目标施工设备的历史作业数据与至少一个第一施工设备的历史作业数据进行融合,生成融合时间序列数据,包括:
5、将所述目标施工设备的历史作业数据以及至少一个第一施工设备的历史作业数据输入卷积神经网络进行卷积计算,并输出第一数据;将所述第一数据输入至第一gru网络中进行处理,并输出所述目标施工设备在目标预设时长内的第一预测时间序列数据;将所述目标施工设备的历史作业数据输入至自回归模型中进行预测,并输出所述目标施工设备在目标预设时长内的第二预测时间序列数据;将所述第一预测时间序列数据以及所述第二预测时间序列数据输入至第一全连接层中进行融合,并输出融合时间序列数据。
6、在本技术一种可能的实现方式中,将所述目标施工设备的历史作业数据与至少一个第一施工设备的历史作业数据进行融合,生成融合时间序列数据,包括:
7、将所述目标施工设备的历史作业数据以及至少一个第一施工设备的历史作业数据输入卷积神经网络进行卷积计算,并输出第一数据;将所述第一数据输入至第一gru网络中进行处理,并输出所述目标施工设备在目标预设时长内的第一预测时间序列数据;将所述第一预测时间序列数据输入至第二gru网络中进行处理,并输出第三预测时间序列数据,其中,所述第二gru网络为周期跳跃式gru网络;将所述目标施工设备的历史作业数据输入至自回归模型中进行预测,并输出所述目标施工设备在目标预设时长内的第二预测时间序列数据;将所述第一预测时间序列数据、所述第二预测时间序列数据以及第三预测时间序列数据输入至第一全连接层中进行融合,并输出融合时间序列数据。
8、在本技术一种可能的实现方式中,将所述目标施工设备的历史作业数据与至少一个第一施工设备的历史作业数据进行融合,生成融合时间序列数据,包括:
9、将所述目标施工设备的历史作业数据以及至少一个第一施工设备的历史作业数据输入卷积神经网络进行卷积计算,并输出第一数据;将所述第一数据输入至第一gru网络中进行处理,并输出所述目标施工设备在目标预设时长内的第一预测时间序列数据;将所述第一预测时间序列数据输入至第二gru网络中进行处理,并输出第三预测时间序列数据,其中,所述第二gru网络为周期跳跃式gru;将所述第一预测时间序列数据以及第三预测时间序列数据输入至第一全连接层中进行融合,并输出融合时间序列数据。
10、在本技术一种可能的实现方式中,所述历史作业数据还包括历史空间时间序列数据,所述历史空间时间序列数据包括按照时间序列排列的时间点以及在所述时间点对应的空间位置,其中,所述智能调度方法还包括:将所述目标施工设备的历史空间时间序列数据、至少一个第一施工设备的历史空间时间序列数据输入空间预测模型中进行预测,生成预测空间时间序列数据;将所述目标施工设备的历史作业数据、所述融合时间序列数据以及所述预测空间时间序列数据进行融合,生成所述目标施工设备在目标预设时长内的预测时间序列数据。
11、在本技术一种可能的实现方式中,在基于所述调度策略,生成每个目标施工设备的控制指令,以使得每个目标施工设备以对应的控制指令执行对应任务之后,所述智能调度方法还包括:实时检测目标施工设备在目标预设时长内的实时序列数据;当所述目标施工设备在所述目标预设时长内的实时序列数据与所述目标施工设备的预测时间序列数据不同时,调用所述运筹优化求解器,以根据所述目标施工设备的实时序列数据调整调度策略。
12、作为本技术的第二方面,本技术还提供了一种施工设备智能调度系统,包括:
13、数据库,所述数据库用于存储施工设备的作业数据;模型库,所述模型库包括第一子模块,所述第一子模块用于调用目标施工设备的历史作业数据;第二子模块,所述第二子模块用于调用与所述目标施工设备同类设备的至少一个第一施工设备的历史作业数据;第三子模块,所述第三子模块用于将所述目标施工设备的历史作业数据与至少一个第一施工设备的历史作业数据进行融合,生成融合时间序列数据;以及第四子模块,所述第四子模块用于将所述目标施工设备的历史作业数据以及所述融合时间序列数据进行融合,生成所述目标施工设备在目标预设时长内的预测时间序列数据;以及运筹优化模型,所述运筹优化模型包括:约束条件模块、日前调度模块以及运筹优化求解器,所述约束条件模块用于选取约束条件;所述日前调度模块用于获取调度目标预设时长内的多个目标施工设备所对应的约束条件,并基于所述约束条件,调用所述运筹优化求解器对多个目标施工设备在目标预设时长内的预测时间序列数据进行模拟计算,以输出多个目标施工设备在所述目标预设时长内的调度策略,并基于所述调度策略,生成每个目标施工设备的控制指令,以使得每个目标施工设备以对应的控制指令执行对应任务。
14、在本技术一种可能的实现方式中,所述运筹优化模型还包括:实时调度模型,所述实时调度模型用于实时检测目标施工设备在目标预设时长内的实时序列数据;并当所述目标施工设备在所述目标预设时长内的实时序列数据与所述目标施工设备的预测时间序列数据不同时,调用所述运筹优化求解器,以根据所述目标施工设备的实时序列数据调整调度策略。
15、在本技术一种可能的实现方式中,所述历史作业数据还包括历史空间时间序列数据,所述历史空间时间序列数据包括按照时间序列排列的时间点以及在所述时间点对应的空间位置;其中,所述模型库还包括:空间预测模型,用于对所述目标施工设备的历史空间时间序列数据、至少一个第一施工设备的历史空间时间序列数据进行预测,生成预测空间时间序列数据;其中,所述第四子模块用于将所述目标施工设备的历史作业数据、所述融合时间序列数据以及所述预测空间时间序列数据进行融合,生成所述目标施工设备在目标预设时长内的预测时间序列数据。
16、在本技术一种可能的实现方式中,第三子模块包括:卷积神经网络,用于对所述目标施工设备的历史作业数据以及至少一个第一施工设备的历史作业数据进行卷积计算,并输出第一数据;第一gru网络,用于对所述第一数据输进行处理,并输出所述目标施工设备在目标预设时长内的第一预测时间序列数据;和/或第二gru网络,用于对所述第一预测时间序列数据进行处理,并输出第三预测时间序列数据,其中,所述第二gru网络为周期跳跃式gru;和/或自回归模型,用于对所述目标施工设备的历史作业数据进行预测,并输出所述目标施工设备在目标预设时长内的第二预测时间序列数据;第一全连接层,用于将所述第一预测时间序列数据,和/或所述二预测时间序列数据,和/或第三预测时间序列数据进行融合,并输出融合时间序列数据。
17、本技术提供的施工设备智能调度方法,采用目标施工设备以及同种类施工设备的历史作业数据,首先将目标施工设备与同种类施工设备的历史作业数据进行融合,再将融合后的融合时间序列数据与目标施工设备的历史作业数据(即历史时间序列数据)再次进行融合,确定预测时间序列数据,即目标施工设备的预测时间序列数据,以获取相关性以及周期性更高的数据,即融合了不同尺度的时序特征,能够更加精准和稳定的进行每个目标施工设备的时序预测。最后基于对应的约束条件,对将每个目标施工设备的预测时间序列数据输入至运筹优化模型中进行运筹计算,以确定多个目标施工设备的调度策略,并根据调度策略生成每个目标施工设备的控制指令,以使得目标施工设备以对应的控制指令作业。即通过预测和模型优化的结合,既能够提前预测工作需求,优化调整调度策略,提高矿山作业设备的作业效率和资源利用率。