一种多UUV协同阵型的优化方法及系统
本技术涉及水下目标探测仿真,更具体地说,是涉及一种多uuv协同阵型的优化方法及系统。
背景技术:
1、在现代海洋探测和海洋作战环境下,传统的单一无人水下航行器(uuv)由于其有限的探测范围、续航能力和信息处理能力,已经逐渐不能满足越来越高的技术要求。特别是面对复杂多变的海底环境和日益提升的水下目标隐身技术,单uuv的局限性变得尤为明显。因此,多uuv协同探测作为一种新兴的解决方案,以其在探测范围扩展、任务适应性强和系统容错能力高等方面的优势,成为了海洋探测和军事应用中不可或缺的技术方向。通过配置多个uuv形成特定的阵型协同作业,可以大幅提升探测效率和覆盖面积。然而在特殊应用场景,如军事侦查作业时,个别uuv出现故障会破坏原有uuv集群的作业效果,需要重新调整uuv协同阵型以补充故障uuv带来的侦查空白,确保探测任务有效进行。针对uuv故障阵型调整问题,现有的技术方案有:
2、(1)公开号为cn116107216a的中国发明专利,一种考虑执行器故障的uuv自适应容错集群协调控制方法,公开了进行数据推算uuv故障类型,建立系统位置和速度状态误差方程,将故障信息共享给各跟随uuv,调整跟随uuv的动力输出参数,调整整体跟随队形,从而保持编队队形不变。然而这样的整体阵型调整没有考虑uuv彻底损坏无法参与编队的情况,同时由于各跟随uuv为适应故障uuv进行整体阵型调整,会降低uuv集群的侦查效能。
3、(2)公开号为cn111669228a的中国发明专利,一种基于水声通信的uuv集群自组网方法及系统,公开了uuv集群自组网的主节点损坏或缺失时,竞争机制重新选择主节点,其他uuv节点自动配为从节点,重构uuv集群自组网,即先将各节点恢复到分布式集群方式,再通过节点间的竞争和优选机制自主配置主从节点,再次创建集中式网络。该方案有考虑到uuv彻底损坏退出集群的情况,然而其所提供的技术方案适用于uuv数量冗余的场景,在军事侦查领域,实际投放的uuv通常不足以全覆盖整片海域,完成饱和式侦查,因此该方案在军事侦测领域实用度较低。
4、综上,现有的uuv故障阵型调整技术存在没有考虑uuv彻底损坏无法参与编队的情况、降低uuv集群的侦查效能、需要uuv投放数量冗余的问题。
技术实现思路
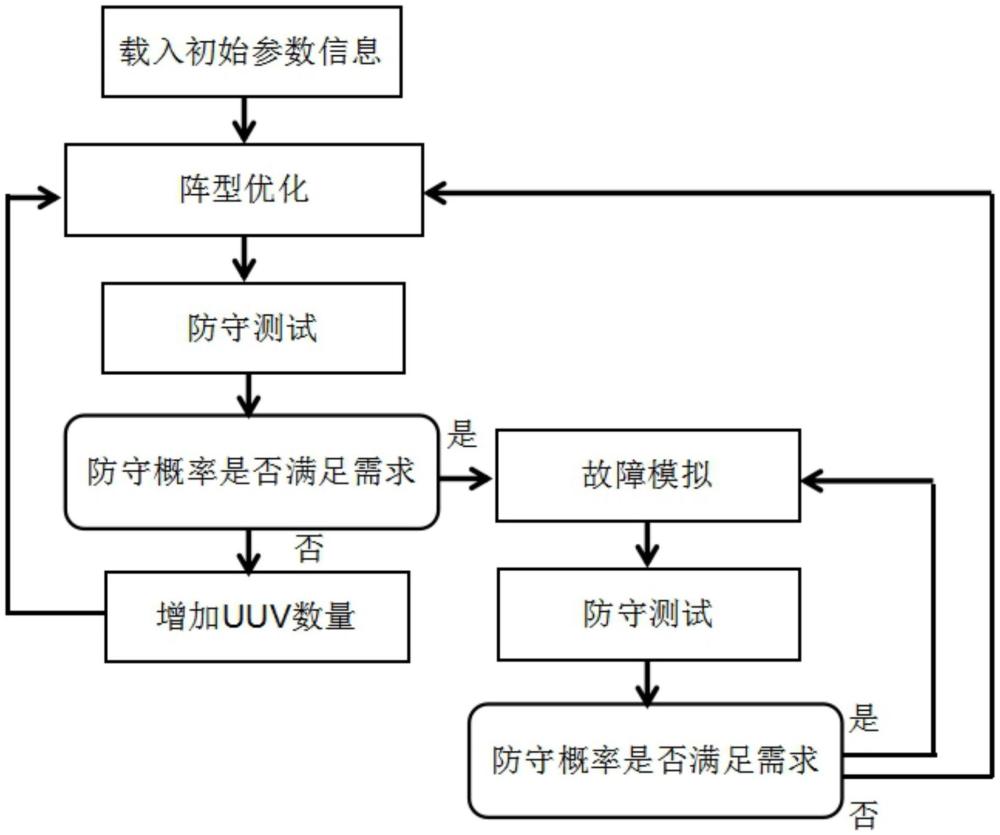
1、为解决上述问题,本技术采用的技术方案是一种多uuv协同阵型的优化方法,包括:
2、阵型优化:通过遗传算法计算最大化探测面积的uuv阵型;
3、防守测试:采用蒙特卡洛方法随机改变非合作目标的位置和航向,结合执行阵型优化后的uuv阵型计算防守概率;
4、故障模拟:周期性减少uuv数量,执行防守测试;
5、补充需求评估:故障模拟后防守概率低于防守需求则执行阵型优化后再次进行防守测试,防守测试后防守概率仍低于防守需求则补充投放uuv并执行阵型优化;防守概率高于防守需求则继续执行故障模拟。
6、优选的,阵型优化包括以下步骤:
7、s1:随机生成初始种群,每个种群个体代表一个包含所有uuv的位置坐标的布局方案;
8、s2:根据布局方案计算uuv的总探测面积;
9、s3:根据总探测面积设定个体被选择概率,最优个体直接进入下一代,引入惩罚因子降低uuv配置超出预定海域范围的个体被选择概率;
10、s4:实施单点交叉法,随机选择个体和交叉点,交换被选择个体编码串的一部分,产生新个体;
11、s5:以设定的变异概率,随机改变个体的编码信息;
12、s6:重复s2至s5过程,直至预设迭代次数,输出总探测面积最大的uuv的阵型。
13、优选的,防守测试包括:
14、实时计算并更新uuv及非合作目标的状态,非合作目标的最终目的地设定为以围绕基地所在岛屿的海岸线向外等距延伸构成的内防守圈;
15、当非合作目标首次进入uuv的探测范围时开始使检测概率随仿真时间增加,非合作目标在检测概率累积至1之前到达内防守圈视为探测失败,非合作目标在到达内防守圈之前检测概率累积至1视为探测成功;
16、所有非合作目标被探测到或到达了内防守圈,视为一次测试结束,输出防守概率。
17、优选的,非合作目标在检测概率累积至1之前离开uuv探测范围,累积检测概率清零。
18、优选的,uuv补充投放时,新投放的uuv在参与阵型优化步骤时位置固定为基地所在岛屿的海岸线处。
19、优选的,还包括设定系统仿真参数,推导声纳系统探测范围;
20、系统仿真参数包括声呐系统性能、uuv性能、海洋环境特性及非合作目标特征。
21、优选的,在防守测试前建立非合作目标声学模型:根据非合作目标的表面材质、体积、几何结构、种类和特性,模拟非合作目标在不同观测角度下的目标回波。
22、优选的,在防守测试前进行预测试:使非合作目标以预设的位置、方向及速率向内防守圈运动,设定uuv初始数量及运动速率,除此之外预测试的测试过程与防守测试相同。
23、本技术还提供了一种多uuv协同阵型的优化系统,包括:
24、阵型优化模块:用于通过遗传算法计算最大化探测面积的uuv阵型;
25、防守测试模块:用于采用蒙特卡洛方法随机改变非合作目标的位置和航向,结合执行阵型优化后的uuv阵型计算防守概率;
26、故障模拟模块:用于周期性减少uuv数量;
27、补充需求评估模块:用于评估补充uuv的时机,评估依据为故障模拟后防守概率低于防守需求则执行阵型优化后再次进行防守测试,防守概率仍低于防守需求则补充投放uuv并执行阵型优化;防守概率高于防守需求则继续执行故障模拟。
28、本发明的有益效果是:
29、1.通过遗传算法优化uuv阵型配置,并对uuv故障引发的对于非合作目标探测概率降低进行评估,实现了uuv侦查效能动态评估机制,根据uuv故障情况实时调整uuv阵型并判断是否需要补充投放uuv完善uuv阵型以满足侦查需求;
30、2.通过遗传算法寻找最大化侦测面积的uuv布局,无需冗余投放uuv进行侦查任务,降低侦查成本,并且无需劣化正常工作的uuv运动方案,充分保证侦查效果;
31、3.通过实时累积检测概率方法,有效提升了水下探测的连续性与准确性。该机制模拟非合作目标的行为模式,增强了探测系统面对不确定目标行为时的适应性。当目标逃避后概率值重置,充分考虑真实军事侦测作业情况;
32、4.引入了惩罚因子处理uuv配置超出预定海域范围的情况,当uuv位置超界时,该惩罚因子机制自动降低个体的适应度值,引导种群向合理解的方向进化;
33、5.根据目标特性构建包含多种非合作目标类型的综合模型,能够区分并模拟不同目标所产生的回波强度的变化范围,更加准确地预测并理解非合作目标的声学特征,进而优化声纳系统的探测配置;在真实的海洋环境下,这将极大地提高uuv协同探测阵型的效率和有效性。
- 还没有人留言评论。精彩留言会获得点赞!