一种车辆智能驾驶视觉感知系统的制作方法
本发明涉及智能驾驶视觉感知,具体为一种车辆智能驾驶视觉感知系统。
背景技术:
1、车辆智能驾驶视觉感知系统是现代自动驾驶技术中至关重要的组成部分,它通过模拟人类驾驶员的视觉感知能力来识别和理解车辆周围的环境。车辆智能驾驶视觉感知系统的核心技术包括图像获取、处理、分析和理解,涉及到计算机视觉、机器学习、人工智能等多个领域。视觉感知系统的硬件基础通常包括多组高清摄像头,捕捉车辆外部全方位视角的画面数据。这些摄像头能够在不同的光照条件下工作,并且具备高动态范围hdr来适应极端的亮度变化。软件方面,视觉感知系统采用智能算法模型进行图像预处理,通过去噪、对比度增强和颜色校正等多个步骤来提高图像质量,再使用边缘检测、特征提取和模式识别等技术来识别图像中的物体,如其他车辆、行人、交通标志和道路边界等,在复杂多变的真实世界环境中也能保持高性能。除了物体识别之外,视觉感知系统还需要理解场景的语义信息,比如判断路面的状况、识别车道和交叉口的类型、理解交通信号灯的状态等。这些信息对于制定合适的驾驶策略至关重要。安全性是视觉感知系统设计的核心考虑因素之一。系统必须能够在各种天气条件和光照环境下稳定工作,并且能够及时检测并响应潜在的危险情况。如果系统检测到前方有突然障碍物出现,它需要迅速评估情况并采取紧急制动措施。随着技术的发展,车辆智能驾驶视觉感知系统正变得越来越智能和自适应。未来的系统将更加精准地理解复杂场景,更好地与其他车辆和基础设施进行通信,并在更广泛的驾驶条件下提供支持。这将极大地推动自动驾驶技术的发展,为人们提供更安全、更便捷、更舒适的出行体验。
2、目前,传统车辆智能驾驶视觉感知系统面对复杂拥挤的交通环境,存在感知盲区,容易误报或漏报关键信息,从而影响到智能驾驶决策的准确性,感知算法模型在实际应用场景下泛化能力不足,性能下降导致数据分析存在兼容性障碍。
技术实现思路
1、针对现有技术的不足,本发明提供了一种车辆智能驾驶视觉感知系统,具备多维采集兼容感知能力强、深度学习决策准确性高等优点,解决了传统车辆智能驾驶视觉感知系统存在盲区决策准确性低,算法模型泛化能力不足存在分析障碍的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、根据本发明的第一方面,提供了一种车辆智能驾驶视觉感知系统。该系统包括:
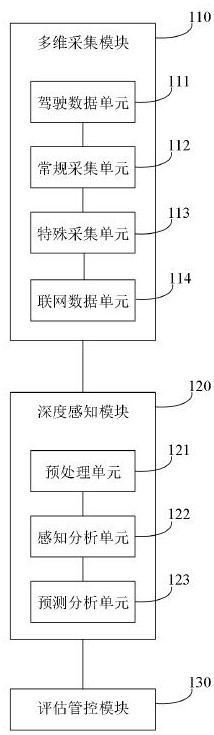
4、多维采集模块、深度感知模块和评估管控模块;
5、所述多维采集模块包括驾驶数据单元、常规采集单元、特殊采集单元和联网数据单元;所述驾驶数据单元通过网络连接座舱操作系统采集驾驶数据集,并传输至深度感知模块;所述驾驶数据集包括实时车速、油量、电量、转向角度和导航信息;所述常规采集单元通过网络连接高清摄像头采集常规数据集,并传输至深度感知模块;所述常规数据集包括高清摄像头捕捉到的车辆外部全方位视角的图像信息,所述常规采集单元将常规数据集分别描述为、、、...、,至对应多个不同视角高清摄像头捕捉到的画面信息;所述特殊采集单元通过网络连接红外激光摄像头采集特殊数据集,并传输至深度感知模块;所述特殊数据集包括红外激光摄像头捕捉到的车辆外部全方位视角的图像信息,所述特殊采集单元将特殊数据集分别描述为、、、...、,至对应多个不同视角红外激光摄像头捕捉到的画面信息;所述联网数据单元通过网络连接云平台采集联网数据集,并传输至深度感知模块;联网数据集包括云平台提供的数字交通信息,所述联网数据单元将联网数据集分别描述为、、、...、,至对应驾驶环境中多个路段的数字交通信息;所述多维采集模块通过网络连接深度感知模块;
6、所述深度感知模块包括预处理单元、感知分析单元和预测分析单元;所述预处理单元依次识别常规数据集至中存在的行人、车辆或障碍物,并统计存在行人、车辆或障碍物的高清摄像头总数;若常规数据集至中存在行人、车辆或障碍物的高清摄像头总数超过高清摄像头总数的一半,判断当前交通状态为拥挤,预处理单元将常规数据集结合特殊数据集,过滤优化得到关键信息素;若常规数据集至中存在行人、车辆或障碍物的高清摄像头总数未超过高清摄像头总数的一半,判断当前交通状态为畅通,预处理单元根据常规数据集过滤优化得到关键信息素;所述预处理单元将关键信息素传输至感知分析单元;联网数据集进行模型训练,所述感知分析单元将关键信息素和驾驶数据集代入训练后的深度学习算法模型,计算得到深度风险系数,并传输至预测分析单元;所述预测分析单元根据深度风险系数、关键信息素和联网数据集,计算得到风险预测系数,并传输至评估管控模块,所述深度感知模块通过网络连接评估管控模块;
7、所述评估管控模块根据关键信息素、深度风险系数和风险预测系数,判断生成对应的管控信号,并对应连接座舱操作系统或自动驾驶系统进行驾驶管控。
8、进一步地:所述感知分析单元使用keras深度学习框架提供的subclassing api来构建深度学习算法模型,并通过联网数据集中的数字交通信息进行模型训练,所述感知分析单元将训练后的深度学习算法模型描述为,表示深度学习算法模型开始训练的时间点,表示深度学习算法模型结束训练的时间点。
9、进一步地:所述感知分析单元将关键信息素和驾驶数据集代入训练后的深度学习算法模型,计算得到深度风险系数,其计算公式如下:公式中,表示深度风险系数,表示将摄像头识别到的行人、车辆和障碍物关键信息结合驾驶操作实时车速、油量、电量、转向角度和导航信息代入训练后的深度学习算法模型,分析评估出当前驾驶环境下的深度风险系数。
10、进一步地:所述预测分析单元根据深度风险系数、关键信息素和联网数据集,计算得到风险预测系数,其计算公式如下:公式中,表示风险预测系数,表示深度风险系数在计算风险预测过程中的采样比例,表示关键信息素在计算风险预测过程中的采样比例,表示数字交通信息在计算风险预测过程中的采样比例,表示将当前驾驶环境下的深度风险系数、摄像头识别到的行人、车辆和障碍物关键信息和数字交通信息代入训练后的深度学习算法模型,分析预测出未来驾驶环境下的风险预测系数。
11、进一步地:所述关键信息素中车辆行驶方向存在行人、车辆和障碍物时,评估管控模块判断生成刹车管控信号,并连接座舱操作系统主动刹车减速。
12、进一步地:所述深度风险系数高于风险预测系数时,评估管控模块判断生成被动管控信号,所述深度风险系数低于等于风险预测系数时,评估管控模块判断生成主动管控信号。
13、进一步地:所述评估管控模块根据被动管控信号连接座舱操作系统显示关键信息素和联网数据集,所述评估管控模块根据主动管控信号连接智能驾驶系统主动切换为全自动驾驶模式。
14、根据本发明的第二方面,提供了一种电子设备。该电子设备包括存储器和处理器,所述存储器上存储有计算机程序,该计算机程序被所述处理器执行时,执行所述的一种车辆智能驾驶视觉感知系统中的方法。
15、根据本发明的第三方面,提供了一种存储介质,该存储介质存储的计算机程序,能够被一个或多个处理器执行,能够用来实现所述的一种车辆智能驾驶视觉感知系统中的方法。
16、与现有技术相比,本发明提供了一种车辆智能驾驶视觉感知系统,具备以下有益效果:
17、1、本发明通过多维采集模块设置驾驶数据单元、常规采集单元、特殊采集单元和联网数据单元采集驾驶数据集、常规数据集、特殊数据集和联网数据集,深度感知模块设置预处理单元、感知分析单元和预测分析单元,预处理单元根据常规数据集依次识别常规数据集至中存在的行人、车辆或障碍物,并统计存在行人、车辆或障碍物的高清摄像头总数,若常规数据集至中存在行人、车辆或障碍物的高清摄像头总数超过高清摄像头总数的一半,判断当前交通状态为拥挤,拥挤环境下常规感知方式存在盲区,导致系统分析能力下降,需要特殊感知方式弥补关键信息的缺失,预处理单元将常规数据集结合特殊数据集,过滤优化得到关键信息素,多维采集兼容感知能力强。
18、2、本发明通过感知分析单元使用keras深度学习框架提供的subclassing api来构建深度学习算法模型,并通过联网数据集中的数字交通信息进行模型训练,更能满足当前驾驶路段环境所需的感知需求,感知分析单元将关键信息素和驾驶数据集代入训练后的深度学习算法模型,计算得到深度风险系数,为后续精准决策驾驶操作提供可靠依据,预测分析单元根据深度风险系数、关键信息素和联网数据集,计算得到风险预测系数,为后续切换自动驾驶模式提供数据参考,评估管控模块根据关键信息素判断生成刹车管控信号,并连接座舱操作系统主动刹车减速,缩短了决策周期,提高了系统应急响应速度,评估管控模块根据深度风险系数和风险预测系数判断生成被动管控信号或主动管控信号,辅助驾驶员决策当前交通状态下行车操作或主动切换为全自动驾驶模式,避免复杂拥挤交通环境下,驾驶员响应不及时而导致交通事故,深度学习决策准确性高。
19、
- 还没有人留言评论。精彩留言会获得点赞!