一种降低环境光干扰的路况检测方法与流程
本发明涉及图像处理,特别涉及,一种降低环境光干扰的路况检测方法。
背景技术:
1、目标检测算法已经广泛地应用于自动驾驶、室外监控、航空航天等各个领域,为社会带来巨大的价值和实际意义。但由于图像采集设备在采集室外图像时往往会受到天气情况的影响,如大雨、大雾天气,导致捕获的图像中目标的可辨识度降低,很大程度上影响目标检测效果。同时图像中的小目标对象较难被模型识别检测。因此针对目标检测模型对大雾天气条件下目标检测效果不理想的问题,提出了一种改进方法,该方法解决由于现有的图像去雾算法在估计大气光照值和透射率的过程中几乎不考虑背景干扰,导致去雾的效果不理想的问题。
技术实现思路
1、针对上述缺陷,本发明解决的技术问题在于,提供一种降低环境光干扰的路况检测方法,以解决现在技术所存在的在估计大气光照值和透射率的过程中几乎不考虑背景干扰,导致去雾的效果不理想的问题。
2、本发明提供了一种降低环境光干扰的路况检测方法,包括:
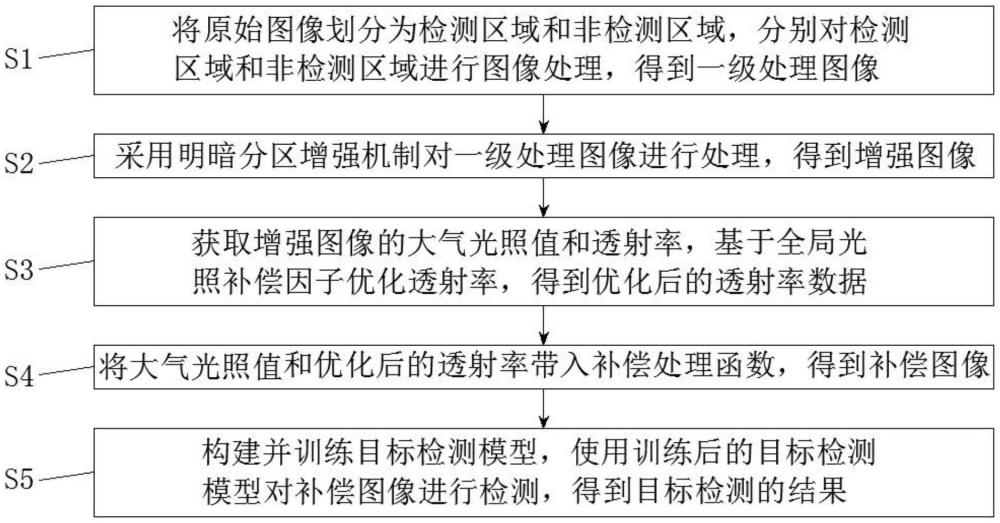
3、步骤1、将原始图像划分为检测区域和非检测区域,分别对检测区域和非检测区域进行图像处理,得到一级处理图像;
4、步骤2、采用明暗分区增强机制对一级处理图像进行处理,得到增强图像;
5、步骤3、获取增强图像的大气光照值和透射率,基于全局光照补偿因子优化透射率,得到优化后的透射率数据;
6、步骤4、将大气光照值a1和优化后的透射率t(x)带入补偿处理函数,得到补偿图像;
7、步骤5、构建并训练目标检测模型,使用训练后的目标检测模型对补偿图像进行检测,得到目标检测的结果。
8、优选地,所述步骤1的具体步骤包括:
9、步骤1.1、在暗通道图像中设置一个临界阈值r,基于临界阈值将原始图像划分为检测区域和非检测区域;
10、步骤1.2、基于颜色衰减先验方法对非检测区域图像进行去雾处理;
11、步骤1.3、获取平均全局大气光值,结合暗通道先验法对检测区域图像进行去雾处理;
12、步骤1.4、基于引导滤波函数对去雾处理后的图像进行去噪处理,引导滤波函数表示为:
13、,
14、其中q表示输出图像,i表示引导图像,i和k表示像素的索引,ε表示正则化参数,p表示去雾处理后的图像,μk表示i在窗口ω_k中的均值,表示i在窗口ω_k中的方差,|ω|表示窗口ω_k中像素的数量,表示去雾处理后的图像p在窗口ω_k中的均值。
15、优选地,所述步骤2的具体步骤包括:
16、步骤2.1、将去噪后的图像从rgb颜色空间转到了lab颜色空间,获取转换后图像的l通道图像并对获取的通道图像进行归一化;
17、步骤2.2、通过滑动窗口亮度函数获取局部亮矩阵和局部暗矩阵;
18、步骤2.3、将增强的明暗区域信息与转换后图像融合得到转换后增强图像;
19、步骤2.4、将转换后增强图像转换回rgb颜色空间,得到增强图像。
20、优选地,所述步骤3的具体步骤包括:
21、步骤3.1、获取增强图像的大气光照值a1和初始透射率t(x);
22、步骤3.2、将以像素x为中心的小范围内的像素平均值作为x处的因子,得到权重系数ω(x);
23、步骤3.3、使用引导滤波和权重系数优化初始透射率,得到优化后的透射率。
24、优选地,所述步骤1.2的具体步骤包括:
25、步骤1.2.1、采用最大似然法获取去雾的随机误差范围;
26、步骤1.2.2、采用梯度下降法获取去雾过程中各参数的调节系数;
27、步骤1.2.3、基于深度获取函数得到深度数据,深度获取函数表示为:
28、d(x)=θ0+θ1u(x)+θ2v(x)+λ(x),其中v(x)表示饱和度,u(x)表示亮度,d(x)表示深度,θ0、θ1、θ2表示不同参数的调节系数,λ(x)表示随机误差;
29、步骤1.2.4、根据大气散射函数获取非检测区域去雾后的图像,大气散射函数表示为:i(x)=j(x)·e-βd(x)+a·[1-e-βd(x)],其中i(x)表示输入的非检测区域图像,j(x)表示处理后得到的清晰图像,a表示大气光值,β表示大气散射系数。
30、优选地,所述步骤1.3中获取平均全局大气光值的函数表示为:
31、其中表示非检测区域暗通道图像中的像素值的中间值,表示检测区域暗通道图像的像素值的中间值,x表示非检测区域的权重系数,x=n/n,n表示检测区域像素的总数,n表示图像像素的总数。
32、优选地,所述步骤2.2的具体步骤包括:
33、步骤2.2.1、采用n×n像素大小的滑动窗口在l通道图像上滑动,并计算窗口内最大或最小的亮度值,得到l通道图像的局部亮度矩阵,滑动窗口亮度函数表示为:其中,lw1和lb1分别为局部亮矩阵和局部暗矩阵,ω(x)为以像素x为中心、小范围内的像素亮度值,l为转换后图像的l通道图像;
34、步骤2.2.2、采用n×n的滑动窗口在得到的局部亮度矩阵上滑动,使得窗口的中心像素的亮度值等于窗口中围绕中心像素的其他各像素亮度值的乘积,得到输出矩阵,输出矩阵的函数表示为:其中lw2和lb2分别为局部亮矩阵和局部暗矩阵的输出矩阵;
35、步骤2.2.3、对转换后图像中有亮度的区域进行增强,得到增强后的局部亮矩阵lw,将增强的黑暗的区域取反,得到增强后的局部暗矩阵lb。
36、优选地,所述步骤2.3的具体步骤包括:
37、步骤2.3.1、基于亮区提取函数从局部亮矩阵lw中获取明亮区域信息,亮区提取函数表示为其中,bright是明亮区域信息,k1是l通道图像中的明亮区域范围,max()和mean()分别为计算转换后图像的最大值和平均值函数;
38、步骤2.3.2、基于暗区提取函数从局部暗矩阵lb中获取黑暗区域信息,暗区提取函数表示为其中,dark是黑暗区域信息,k2是l通道图像的黑暗区域范围,min()为计算转换后图像的最小值函数,为局部暗矩阵取反处理后的转换矩阵;
39、步骤2.3.3、将明亮区域信息、黑暗区域信息和转换后图像的中间区域信息融合,获得增强l通道图像。
40、优选地,所述步骤4中补偿处理函数表示为:i(x)为户外拍摄成像系统所获得的总光强。
41、优选地,所述步骤5中目标检测模型的损失函数表示为:lfocal-eiou=iouγ(liou+ldis+lasp),其中γ是用于控制曲线弧度的超参数,liou是iou损失函数,ldis是距离损失函数,lasp是边长损失函数。
42、由上述方案可知,本发明提供的一种降低环境光干扰的路况检测方法首先通过分区的方法对检测区域和非检测区域分别进行去雾处理,再通过明暗分区增强机制在lab颜色空间中对输入图像进行对比度增强,以实现光照补偿;为了减少背景像素对中心像素的干扰,使得计算得到的参数更符合无雾环境下的成像条件,对增强图像进行暗通道计算,估算出大气光照值和初始透射率;采用全局光照补偿因子和引导滤波对初始透射率进行边缘细化;将大气光照值和优化后的透射率代入补偿处理函数,完成图像去雾;采用优化的损失函数构建目标检测模型,更快更好的定位并获取目标检测数据。本发明作用效果显著,适于广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!