一种基于数字孪生实现智慧交通下的场景建模方法及系统与流程
本发明涉及交通场景建模,尤其涉及一种基于数字孪生实现智慧交通下的场景建模方法及系统。
背景技术:
1、智慧交通下的场景建模是指利用各种技术手段和方法,对交通环境中的车辆、路网、行人等元素进行描述、模拟和分析,以便更好地理解和优化交通运行状况的过程。场景建模为智能交通系统提供数据支持,通过场景建模可以预测交通流量,优化信号控制、路口设计等,提高道路通行效率,也可以评估不同交通设计方案的效果,并根据模拟结果进行交通规划和设计优化,从而实现智能调度、路径规划、拥堵缓解等功能,提升整个交通系统的效率和安全性。因此,场景建模对于现代化交通具有重大意义。
2、目前,对于智慧交通下的场景建模一般通过传感器数据分析技术实现,利用各类传感器(如摄像头、雷达、激光雷达等)采集数据,通过数据处理和分析来建立交通场景模型,例如车辆流量、速度分布、拥堵情况等,然而在使用这种方法时,由于数据量过大,导致传感器采集的数据可能受到干扰或损坏,需要进行质量控制和校准,无法达到实时监测交通流量,进行交通分析的效果。
技术实现思路
1、为了解决上述问题,本发明提供了一种基于数字孪生实现智慧交通下的场景建模方法,本发明可以提高交通建模的分析精度。
2、第一方面,本发明提供了一种基于数字孪生实现智慧交通下的场景建模方法,包括:
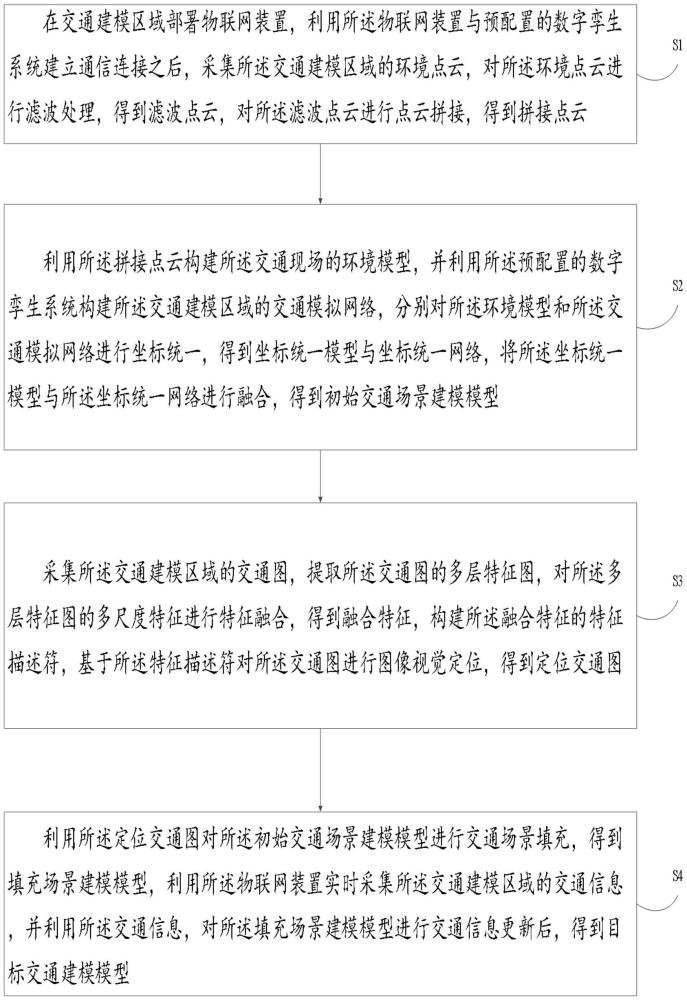
3、在交通建模区域部署物联网装置,利用所述物联网装置与预配置的数字孪生系统建立通信连接之后,采集所述交通建模区域的环境点云,对所述环境点云进行滤波处理,得到滤波点云,对所述滤波点云进行点云拼接,得到拼接点云;
4、利用所述拼接点云构建所述交通现场的环境模型,并利用所述预配置的数字孪生系统构建所述交通建模区域的交通模拟网络,分别对所述环境模型和所述交通模拟网络进行坐标统一,得到坐标统一模型与坐标统一网络,将所述坐标统一模型与所述坐标统一网络进行融合,得到初始交通场景建模模型;
5、采集所述交通建模区域的交通图,提取所述交通图的多层特征图,对所述多层特征图的多尺度特征进行特征融合,得到融合特征,构建所述融合特征的特征描述符,基于所述特征描述符对所述交通图进行图像视觉定位,得到定位交通图;
6、利用所述定位交通图对所述初始交通场景建模模型进行交通场景填充,得到填充场景建模模型,利用所述物联网装置实时采集所述交通建模区域的交通信息,并利用所述交通信息,对所述填充场景建模模型进行交通信息更新后,得到目标交通建模模型。
7、在第一方面的一种可能实现方式中,所述对所述环境点云进行滤波处理,得到滤波点云,包括:
8、将所述环境点云划分为三维体素方格;
9、识别所述三维体素方格的重心点;
10、基于所述重心点,对所述三维体素方格进行降密,得到滤波点云。
11、在第一方面的一种可能实现方式中,所述对所述滤波点云进行点云拼接,得到拼接点云,包括:
12、提取所述滤波点云中的相邻点云;
13、利用所述相邻点云,创建所述滤波点云的旋转矩阵;
14、其中,所述旋转矩阵可用下述形式表示:
15、
16、其中,α表示旋转矩阵,r表示相邻点云的交叉向量,zrx,zy,zz表示相邻点云的交叉向量的三维空间坐标,θ表示相邻点云的交叉角度,e表示相邻点云的单位向量;
17、在利用所述旋转矩阵将所述滤波点云的地面法向量角度旋转一致后,将所述滤波点云进行拼接,得到拼接点云。
18、在第一方面的一种可能实现方式中,所述利用所述拼接点云构建所述交通现场的环境模型,包括:
19、根据所述拼接点云对所述交通现场进行物体检测;
20、基于所述物体检测的结果对所述拼接点云进行目标分割,得到分割点云;
21、基于所述分割点云对所述交通现场进行三维建模,得到环境模型。
22、在第一方面的一种可能实现方式中,所述分别对所述环境模型和所述交通模拟网络进行坐标统一,得到坐标统一模型与坐标统一网络,包括:
23、利用下述公式创建所述环境模型的第一坐标变换矩阵:
24、
25、其中,δ(1)表示第一坐标变换矩阵,表示环境模型中交通现场的三维模型与平面的夹角;
26、利用下述公式创建所述的交通模拟网的第二络坐标变换矩阵:
27、
28、其中,δ(2)表示第二坐标变换矩阵,表示交通模拟网络中网络模型与平面的夹角;
29、基于所述第一坐标变换矩阵与所述第二络坐标变换矩阵对所述环境模型和所述交通模拟网络进行坐标调整,得到坐标统一模型与坐标统一网络。
30、在第一方面的一种可能实现方式中,所述分别对所述环境模型和所述交通模拟网络进行坐标统一,得到坐标统一模型与坐标统一网络,包括:
31、利用下述公式创建所述环境模型的第一坐标变换矩阵:
32、
33、其中,δ(1)表示第一坐标变换矩阵,表示环境模型中交通现场的三维模型与平面的夹角;
34、利用下述公式创建所述的交通模拟网的第二络坐标变换矩阵:
35、
36、其中,δ(2)表示第二坐标变换矩阵,表示交通模拟网络中网络模型与平面的夹角;
37、基于所述第一坐标变换矩阵与所述第二络坐标变换矩阵对所述环境模型和所述交通模拟网络进行坐标调整,得到坐标统一模型与坐标统一网络。
38、在第一方面的一种可能实现方式中,所述提取所述交通图的多层特征图,包括:
39、将所述交通图输入至预配置的残差网络中;
40、利用所述残差网络对所述交通图进行水平池化和竖直池化,得到联级特征图;
41、对所述联级特征图进行卷积处,得到卷积特征图;
42、对所述卷积特征图进行正则化处理,得到多层特征图。
43、在第一方面的一种可能实现方式中,所述对所述多层特征图的多尺度特征进行特征融合,得到融合特征,包括:
44、对所述多尺度特征进行尺度对其,得到对齐特征;
45、对所述对齐特征进行权重分配,得到特征权重;
46、基于所述特征权重对所述多尺度特征进行线性加权融合,得到融合特征。
47、在第一方面的一种可能实现方式中,所述基于所述特征描述符对所述交通图进行图像视觉定位,得到定位交通图,包括:
48、构建所述交通图的基准向量;
49、将所述特征描述符转换为特征向量,利用下述公式计算所述基准向量和所述特征向量的余弦相似度:
50、
51、其中,d表示余弦相似度,m表示基准向量的向量维度,gi表示基准向量中的第i个向量,ti表示特征向量中的第i个向量;
52、根据所述余弦距离对所述交通图进行图像视觉定位,得到定位交通图。
53、第二方面,本发明提供了一种基于数字孪生实现智慧交通下的场景建模系统,所述系统包括:
54、点云拼接模块,用于在交通建模区域部署物联网装置,利用所述物联网装置与预配置的数字孪生系统建立通信连接之后,采集所述交通建模区域的环境点云,对所述环境点云进行滤波处理,得到滤波点云,对所述滤波点云进行点云拼接,得到拼接点云;
55、初始场景建模模块,用于利用所述拼接点云构建所述交通现场的环境模型,并利用所述预配置的数字孪生系统构建所述交通建模区域的交通模拟网络,分别对所述环境模型和所述交通模拟网络进行坐标统一,得到坐标统一模型与坐标统一网络,将所述坐标统一模型与所述坐标统一网络进行融合,得到初始交通场景建模模型;
56、图像视觉定位模块,用于采集所述交通建模区域的交通图,提取所述交通图的多层特征图,对所述多层特征图的多尺度特征进行特征融合,得到融合特征,构建所述融合特征的特征描述符,基于所述特征描述符对所述交通图进行图像视觉定位,得到定位交通图;
57、交通场景建模模块,用于利用所述定位交通图对所述初始交通场景建模模型进行交通场景填充,得到填充场景建模模型,利用所述物联网装置实时采集所述交通建模区域的交通信息,并利用所述交通信息,对所述填充场景建模模型进行交通信息更新后,得到目标交通建模模型。
58、与现有技术相比,本方案的技术原理及有益效果在于:
59、本发明实施例通过在交通建模区域部署物联网装置可以实时监测交通流量、车辆速度和密度,帮助交通管理部门更好地规划道路、信号灯和交通流动,及利用所述物联网装置与预配置的数字孪生系统建立通信连接之后,采集所述交通建模区域的环境点云可以用于建立环墋地图、进行目标检测与跟踪、自主导航等应用,进一步地,本发明实施例通过利用所述拼接点云构建所述交通现场的环境模型可以可以帮助用户分析交通现场中的潜在危险因素,并评估各种交通安全措施的有效性。这有助于制定并优化交通安全政策、设计更安全的道路和交通设施,以及通过所述分别对所述环境模型和所述交通模拟网络进行坐标统一,得到坐标统一模型与坐标统一网络可以确保环境模型中的各个元素在网络上的位置准确无误,这样可以保持空间一致性,使得模型和网络之间的对应关系更加准确,更进一步地,本发明实施例通过采集所述交通建模区域的交通图可以为交通仿真和模拟提供基础的数据支持,对于评估不同交通策略的效果、预测未来交通流量、测试交通系统的鲁棒性等方面非常有用,以及利用所述定位交通图对所述初始交通场景建模模型进行交通场景填充,得到填充场景建模模型可以作为环境感知数据的输入,从而帮助用户进行自动驾驶系统或智能交通系统的环境感知和决策,并且可以通过模拟不同的交通场景,对系统的行为和决策进行评估和改进。本发明实施例提出的一种基于数字孪生实现智慧交通下的场景建模方法及系统,可以提高交通建模的分析精度。
- 还没有人留言评论。精彩留言会获得点赞!