一种基于合成孔径雷达图像的船舶检测方法、装置和设备
本技术涉及船舶检测,特别涉及一种基于合成孔径雷达图像的船舶检测方法、装置和设备。
背景技术:
1、目前,随着海洋贸易和航运业的迅速发展,船舶目标的监测与识别成为了海上安全和监管的关键要素。然而,在复杂的海洋环境中,传统的光学图像或者雷达图像可能受到天气、云层、光照等因素的限制,导致检测精度和可靠性的下降。
2、针对这一问题,基于合成孔径雷达(synthetic aperture radar,sar)图像的船舶目标检测技术应运而生。在船舶目标检测领域,sar技术具有独特的优势,如独立于天气和光照条件、高分辨率、全天候监测等特点,使其成为理想的船舶目标检测工具。
3、然而,现有的sar图像船舶目标检测方法在实际应用中仍然存在着一些挑战,由于海上船舶目标多样,尺寸大小不一,sar船舶图像中的小船舶目标由于分辨率低致使小船舶目标模糊,特征提取困难,而若是聚焦于对小船舶目标的检测则会使得模型向小船舶目标偏移,导致大船舶目标欠拟合。综上,目前sar图像船舶目标检测方法对船舶的检测准确性较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种基于合成孔径雷达图像的船舶检测方法、装置和设备。
2、本说明书采用下述技术方案:
3、本说明书提供了一种基于合成孔径雷达图像的船舶检测方法,包括:
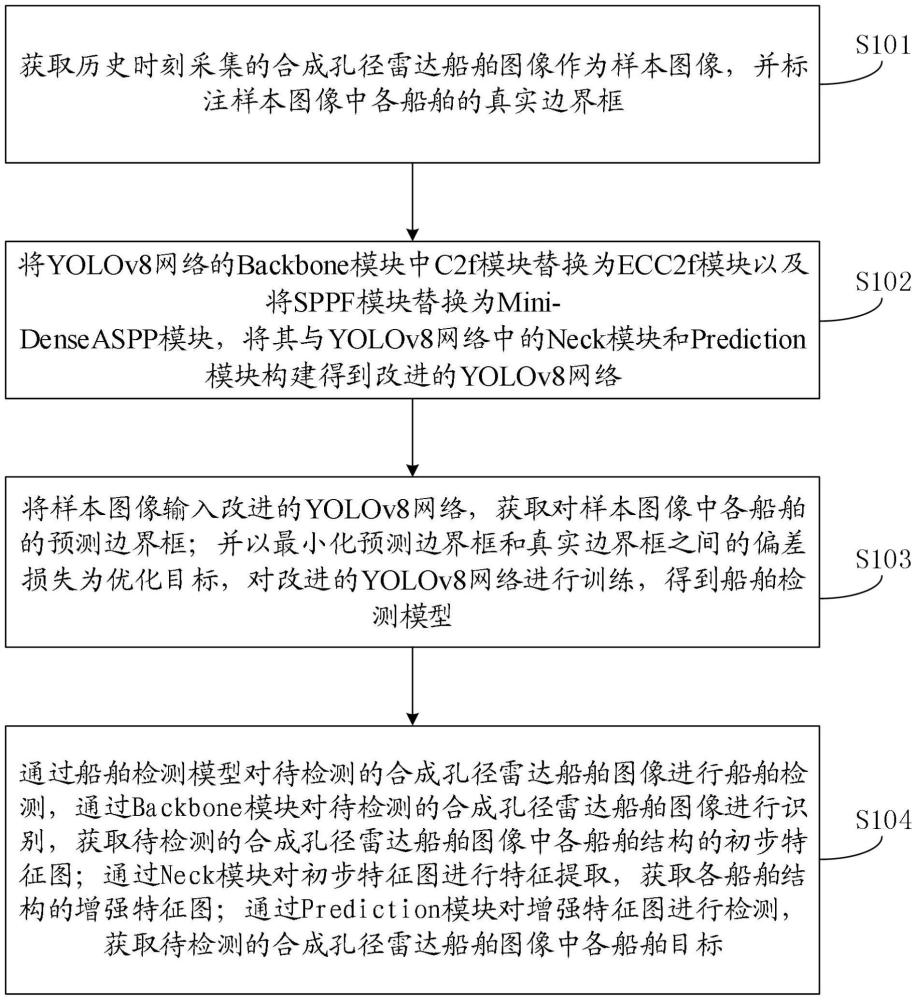
4、获取历史时刻采集的合成孔径雷达船舶图像作为样本图像,并标注样本图像中各船舶的真实边界框;
5、将yolov8网络的backbone模块中c2f模块替换为ecc2f模块以及将sppf模块替换为mini-denseaspp模块,将其与yolov8网络中的neck模块和prediction模块构建得到改进的yolov8网络;
6、将样本图像输入改进的yolov8网络,获取对样本图像中各船舶的预测边界框;并以最小化预测边界框和真实边界框之间的偏差损失为优化目标,对改进的yolov8网络进行训练,得到船舶检测模型;
7、通过船舶检测模型对待检测的合成孔径雷达船舶图像进行船舶检测,通过backbone模块对待检测的合成孔径雷达船舶图像进行识别,获取待检测的合成孔径雷达船舶图像中各船舶结构的初步特征图;通过neck模块对初步特征图进行特征提取,获取各船舶结构的增强特征图;通过prediction模块对增强特征图进行检测,获取待检测的合成孔径雷达船舶图像中各船舶目标。
8、可选地,所述标注样本图像中各船舶的真实边界框,具体包括:
9、通过对样本图像中各船舶的中心点坐标和边界框的宽度和高度进行标注,形成各船舶的真实边界框。
10、可选地,所述将yolov8网络的主干网络中c2f模块替换为ecc2f模块,具体包括:
11、将yolov8网络的主干网络中c2f模块中的bottleneck模块替换为ecbottleneck模块;所述ecbottleneck模块为将eca注意力机制嵌入bottleneck模块的残差结构中得到。
12、可选地,所述通过backbone模块对待检测的合成孔径雷达船舶图像进行识别,获取待检测的合成孔径雷达船舶图像中各船舶结构的初步特征图,具体包括:
13、通过backbone模块中的conv模块对待检测的合成孔径雷达船舶图像进行卷积操作将得到的特征图输入backbone模块中ecbottleneck模块的第一卷积层中,通过1×1的卷积核进行卷积操作,得到第一尺度下的船舶特征;
14、将第一尺度下的船舶特征输入ecbottleneck模块的第二卷积层,通过3×3的卷积核进行卷积操作,得到第二尺度下的船舶特征图;
15、将第一尺度下的船舶特征输入ecbottleneck模块的eca注意力机制中,生成各特征通道的注意力权重,并通过注意力权重对每个特征通道的特征进行加权,得到加权特征图;
16、将加权特征图和第二尺度下的船舶特征图在输出通道维度进行拼接,得到拼接特征图;通过conv模块和backbone模块进行多轮交替特征提取,得到第一特征图,并将第一特征图输入mini-denseaspp模块进行多尺度的船舶特征提取,获取待检测的合成孔径雷达船舶图像中各船舶结构的初步特征图。
17、可选地,所述将第一特征图输入mini-denseaspp模块进行多尺度的船舶特征提取,获取待检测的合成孔径雷达船舶图像中各船舶结构的初步特征图,具体包括:
18、通过mini-denseaspp模块中第一卷积分支以1×1的卷积核对初步特征图进行卷积,提取第一尺度下船舶特征得到第一分支特征图;
19、通过mini-denseaspp模块中第二卷积分支以3×3的卷积核对第一分支特征图进行卷积,提取第二尺度下船舶特征得到第二分支特征图;
20、通过mini-denseaspp模块中第二卷积分支以5×5的卷积核对第二分支特征图进行卷积,提取第三尺度下船舶特征得到第三分支特征图;
21、通过mini-denseaspp模块将第一分支特征图、第二分支特征图和第三分支特征图在输出通道维度进行拼接得到多尺度拼接特征图;
22、通过mini-denseaspp模块中se注意力机制模块对多尺度拼接特征图进行全局平均池化,并生成各特征通道的注意力权重,通过注意力权重对多尺度拼接特征图中各特征通道的特征进行加权;
23、通过mini-denseaspp模块以1×1的卷积核对加权后的多尺度拼接特征图进行卷积操作,提取船舶特征得到初步特征图。
24、可选地,所述预测边界框和真实边界框之间的偏差损失,具体包括:
25、通过下式确定预测边界框和真实边界框之间的基于注意力的边界框损失函数wise-iou v1:
26、
27、通过下式采用离群度确定预测边界框的质量:
28、
29、通过下式基于离群度构造非单调聚焦函数,确定预测边界框和真实边界框之间的偏差损失wise-iou v3:
30、
31、其中,lwiouv1为预测边界框和真实边界框之间的基于注意力的边界框损失函数,liou为预测边界框和真实边界框之间的边界框损失,rwiou为距离注意力,x、y分别为预测边界框中心点的横纵坐标,xgt、ygt分别为真实边界框中心点的横纵坐标,wg、hg分别为预测边界框与真实边界框最小外接矩形的宽和高,*表示从船舶检测模型计算图中分离操作,为liou的滑动平均值,k为非单调聚焦系数,β为离群度,α、δ为超参数。
32、本说明书提供了一种基于合成孔径雷达图像的船舶检测装置,包括:
33、获取模块,用于获取历史时刻采集的合成孔径雷达船舶图像作为样本图像,并标注样本图像中各船舶的真实边界框;
34、构建模块,用于将yolov8网络的backbone模块中c2f模块替换为ecc2f模块以及将sppf模块替换为mini-denseaspp模块,将其与yolov8网络中的neck模块和prediction模块构建得到改进的yolov8网络;
35、训练模块,用于将样本图像输入改进的yolov8网络,获取对样本图像中各船舶的预测边界框;并以最小化预测边界框和真实边界框之间的偏差损失为优化目标,对改进的yolov8网络进行训练,得到船舶检测模型;
36、检测模块,用于通过船舶检测模型对待检测的合成孔径雷达船舶图像进行船舶检测,通过backbone模块对待检测的合成孔径雷达船舶图像进行识别,获取待检测的合成孔径雷达船舶图像中各船舶结构的初步特征图;通过neck模块对初步特征图进行特征提取,获取各船舶结构的增强特征图;通过prediction模块对增强特征图进行检测,获取待检测的合成孔径雷达船舶图像中各船舶目标。
37、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述基于合成孔径雷达图像的船舶检测方法。
38、本说明书提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述基于合成孔径雷达图像的船舶检测方法。
39、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
40、先获取合成孔径雷达船舶图像作为样本图像并标注各船舶的真实边界框,然后将yolov8网络的主干网络中c2f模块替换为ecc2f模块以及将sppf模块替换为mini-denseaspp模块,构建得到改进的yolov8网络,再将样本图像输入改进的yolov8网络进行训练以获得能够识别船舶的船舶检测模型,并应用训练得到的船舶检测模型对待检测的合成孔径雷达船舶图像进行船舶检测。
41、本发明通过将yolov8网络的主干网络中c2f模块替换为ecc2f模块、将sppf模块替换为mini-denseaspp模块,利用ecc2f模块在保证参数量与模型大小的情况下能够获取更多的图像信息,增强了船舶检测模型获取船舶特征的能力,即使合成孔径雷达船舶图像有大量数量的小船舶也能获取到各小船舶的有效特征,利用mini-denseaspp模块的多尺度适应能力,克服船舶检测模型向小船舶目标偏移,从而提高了sar图像船舶检测的准确性和精确度。
- 还没有人留言评论。精彩留言会获得点赞!