用于仿生人眼物联网的智能图像处理方法及系统与流程
本发明涉及图像处理,特别涉及用于仿生人眼物联网的智能图像处理方法及系统。
背景技术:
1、仿生人眼视觉系统具有对复杂场景的高效感知和理解能力,可以广泛应用于监控、安防、智能交通等领域。现有的工业环境下,存在海量传统的电、水、油、气、热等工业仪器仪表,这些传统仪表需要通过人工进行巡检记录,存在仪表巡检工作强度高、数据采集难的技术问题。
技术实现思路
1、本发明提供用于仿生人眼物联网的智能图像处理方法及系统,以解决现有技术中仪表巡检工作强度高、数据采集难的技术问题,实现提高数据采集和分析效率,降低巡检成本的技术效果。
2、第一方面,本发明提供了用于仿生人眼物联网的智能图像处理方法,其中,所述方法包括:
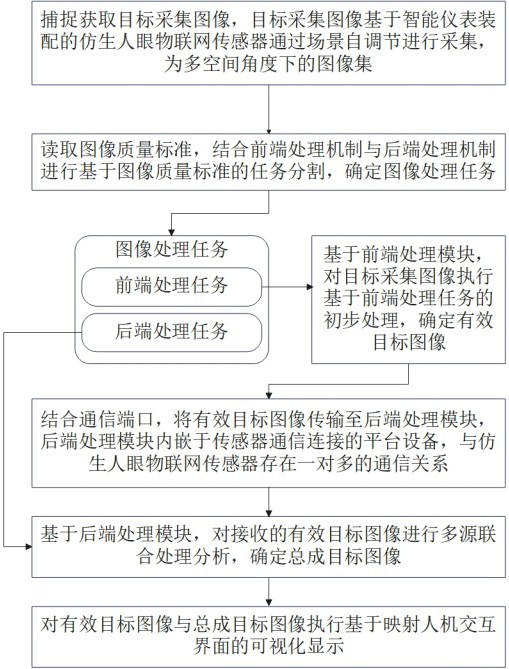
3、捕捉获取目标采集图像,所述目标采集图像基于智能仪表装配的仿生人眼物联网传感器通过场景自调节进行采集,为多空间角度下的图像集;
4、读取图像质量标准,结合前端处理机制与后端处理机制进行基于图像质量标准的任务分割,确定图像处理任务,所述图像处理任务包括前端处理任务与后端处理任务;
5、基于前端处理模块,对所述目标采集图像执行基于所述前端处理任务的初步处理,确定有效目标图像,所述前端处理模块包括预处理层与神经形态处理层,其中,所述初步处理包含基于图像处理类型的一步图像处理,与基于多元特征提取与图像拼接重构的二步图像处理;
6、结合通信端口,将所述有效目标图像传输至后端处理模块,所述后端处理模块内嵌于传感器通信连接的平台设备,与所述仿生人眼物联网传感器存在一对多的通信关系;
7、基于所述后端处理模块,对接收的所述有效目标图像进行多源联合处理分析,确定总成目标图像,其中,所述多源联合处理分析为通过进行聚类处理,基于并行性与关联性进行次序性图像处理的过程;
8、对所述有效目标图像与所述总成目标图像执行基于映射人机交互界面的可视化显示。
9、上述实现方式中的方法,使用基于智能仪表装配的仿生人眼物联网传感器进行图像采集,实现了多空间角度下的图像集,提高了图像采集的全面性和准确性。结合前端处理机制和后端处理机制进行基于图像质量标准的任务分割,使得图像处理任务更加智能和自适应,提高了图像处理的精度和效率。后端处理模块内嵌于传感器通信连接的平台设备,实现了一对多的通信关系,提高了处理效率和通信稳定性。此外,对有效目标图像和总成目标图像的可视化显示,为人机交互界面提供了直观的图像展示,提高了用户体验和操作效率。
10、在一种可行的实现方式中,对所述目标采集图像执行基于所述前端处理任务的初步处理,所述方法还包括:
11、识别所述目标采集图像与所述前端处理任务,确定图像处理类型,其中,各图像处理类型标识有调幅与次序;
12、确定基于所述图像处理类型的一步处理类型,结合所述预处理层进行一步图像处理,确定预处理图像,其中,一步用于进行处理顺序的限定,所述一步图像处理为针对图像质量特征的预处理步骤;
13、确定基于所述图像处理类型的二步处理类型,将所述预处理图像流转至所述神经形态处理层,进行多元特征提取与图像拼接重构,确定所述有效目标图像。
14、该方法中,首先根据目标和任务确定需要进行的图像处理类型,以便针对不同的处理需求采取相应的处理策略。然后根据不同的处理类型分别进行一步处理和二步处理,最终得到有效的目标图像。
15、在一种可行的实现方式中,进行多元特征提取与图像拼接重构,所述方法还包括:
16、对所述预处理图像进行边界重叠定位,进行多空间角度下追踪图像的拼接处理,确定全局预处理图像;
17、识别所述预处理图像,进行多角度下图像特征的识别提取与特征重构,确定重构图像特征,其中,重构特征包括静态维度与动态维度;
18、基于所述全局预处理图像与所述重构图像特征,进行图像重建确定所述有效目标图像。
19、也就是说,对预处理图像进行边界重叠定位,以确保在多空间角度下追踪图像时能够准确拼接,保证图像连续性和完整性。根据边界重叠定位结果,在多空间角度下对图像进行追踪和拼接处理,使得图像能够在不同角度下完整展示目标特征。
20、在一种可行的实现方式中,基于图像特性与信道传输特性,进行前后端交互管理,其中,所述图像特性至少包括图像敏感度,所述信道传输特性包括信道基础特性与信道实时特性。
21、在一种可行的实现方式中,对接收的所述有效目标图像进行多源联合处理分析,所述方法还包括:
22、识别所述后端处理任务,对回传的所述有效目标图像进行层次聚类,确定多组图像,其中,所述后端处理任务包括集群任务类型与独立任务类型,所述有效目标图像标识有传感器编码;
23、遍历所述多组图像,基于任务并行性与关联性,对所述多组图像进行排序,确定任务处理次序;
24、映射所述任务处理次序与所述多组图像,进行图像处理确定所述总成目标图像。
25、在一种可行的实现方式中,所述总成目标图像包括多个仿生人眼物联网传感器的融合图像与基于时空的趋变分布图像。
26、在一种可行的实现方式中,所述执行基于映射人机交互界面的可视化显示,所述方法还包括:
27、遍历所述有效目标图像,确定基于所述前端处理任务的工业数据特征,生成单点特征单列;
28、映射所述有效目标图像与所述单点特征单列,于映射的智能仪表的显示界面进行可视化;
29、遍历所述总成目标图像,确定基于所述后端处理任务的工业数据特征,作为全局特征单列;
30、映射所述总成目标图像与所述全局特征单列,于平台设备显示界面进行可视化。
31、在一种可行的实现方式中,基于映射人机交互界面的可视化显示之后,所述方法还包括:
32、基于所述有效目标图像与所述单点特征单列,生成局部管理方案;
33、基于所述总成目标图像与所述全局特征单列,生成统筹管理方案;
34、对所述局部管理方案与所述统筹管理方案进行决策碰撞分析,结合管理避让原则进行方案调整,确定预管理方案,所述管理避让原则基于管理要素的优先级确定;
35、基于所述预管理方案,进行作业区域的工业化管理。
36、第二方面,本发明还提供了用于仿生人眼物联网的智能图像处理系统,其中,所述系统包括:
37、图像采集单元,所述图像采集单元用于捕捉获取目标采集图像,所述目标采集图像基于智能仪表装配的仿生人眼物联网传感器通过场景自调节进行采集,为多空间角度下的图像集;
38、任务分配单元,所述任务分配单元用于读取图像质量标准,结合前端处理机制与后端处理机制进行基于图像质量标准的任务分割,确定图像处理任务,所述图像处理任务包括前端处理任务与后端处理任务;
39、前端处理单元,所述前端处理单元用于基于前端处理模块,对所述目标采集图像执行基于所述前端处理任务的初步处理,确定有效目标图像,所述前端处理模块包括预处理层与神经形态处理层,其中,所述初步处理包含基于图像处理类型的一步图像处理,与基于多元特征提取与图像拼接重构的二步图像处理;
40、中继传输单元,所述中继传输单元用于结合通信端口,将所述有效目标图像传输至后端处理模块,所述后端处理模块内嵌于传感器通信连接的平台设备,与所述仿生人眼物联网传感器存在一对多的通信关系;
41、后端处理单元,所述后端处理单元用于基于所述后端处理模块,对接收的所述有效目标图像进行多源联合处理分析,确定总成目标图像,其中,所述多源联合处理分析为通过进行聚类处理,基于并行性与关联性进行次序性图像处理的过程;
42、可视化单元,所述可视化单元用于对所述有效目标图像与所述总成目标图像执行基于映射人机交互界面的可视化显示。
43、本发明公开了用于仿生人眼物联网的智能图像处理方法及系统,包括:基于智能仪表装配的仿生人眼物联网传感器通过场景自调节进行采集,捕捉目标采集图像,得到多空间角度下的图像集;读取图像质量标准,结合前端处理机制与后端处理机制进行基于图像质量标准的任务分割,确定图像处理任务,包括前端处理任务与后端处理任务;基于前端处理模块,对目标采集图像执行初步处理,确定有效目标图像,前端处理模块包括预处理层与神经形态处理层;结合通信端口,将有效目标图像传输至后端处理模块,后端处理模块内嵌于传感器通信连接的平台设备,与仿生人眼物联网传感器存在一对多的通信关系;基于后端处理模块,对接收的有效目标图像进行多源联合处理分析,确定总成目标图像;对有效目标图像与总成目标图像执行基于映射人机交互界面的可视化显示。本发明公开的用于仿生人眼物联网的智能图像处理方法及系统解决了仪表巡检工作强度高、数据采集难的技术问题,实现提高数据采集和分析效率,降低巡检成本的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!