一种道路清扫车可行驶边界检测方法及系统与流程
本发明涉及激光扫描,具体为一种道路清扫车可行驶边界检测方法及系统。
背景技术:
1、无人清扫车的应用和普及极大程度减少了人工成本,为社会和企业提供了更智能化更高效的清扫方案。道路边缘区域一般堆积了更多的垃圾,是清扫的重点区域。无人清扫车需要更高精度的贴边清扫,才能解决清扫质量问题。通过可行驶边界检测系统,无人清扫车可以更好地识别道路边缘、行人、交通标识和其他障碍物,从而更精准地规划清扫路径,避免碰撞和提高清扫效率。
2、现有技术方案主要依赖于各种传感器,包括以视觉传感器为主的视觉检测方案,以激光雷达为主的检测方案,超声波雷达扫描检测方案,组合导航与高精地图结合的检测方案等。
3、视觉传感器利用车载摄像头捕获的图像,通过计算机视觉算法来识别路沿的边缘、颜色或纹理等特征。激光雷达通过分析点云特征,如高差等来确定路沿的位置。超声波雷达可以用于测量车辆与路沿之间的距离,从而帮助识别路沿的位置。利用高精度地图数据,可以预先知道道路的几何信息,包括路沿的位置和形状,从而辅助路沿检测。结合组合导航数据,可定位自车所在的位置和方向,进而估计路沿的位置。
4、视觉检测方案实时性较好,但是精度不高,受光照和阴影变化影响,没有颜色和纹理信息的路沿处效果较差。
5、超声波雷达扫描检测方案的不足在于超声波雷达扫描范围有限,且易受到物体材质和多路径效应的干扰。
6、而多传感器融合的方案,需要进行多传感器之间的标定工作,另外多源信息冲突时,需要进行有效的筛选,滤波,融合等操作,增加了成本和工作量。
7、以组合导航与高精地图结合的检测方案不但地图制作成本较大,且环境一旦发生较大变化,需要重新制图。
8、激光雷达可分为机械激光雷达和固态激光雷达。机械激光雷达所获取的点云数据可通过机械激光路沿检测算法进行处理:通过提取道路边沿点,再进行这些点集的曲线拟合,但是少量突出的地物点,如低矮树枝等会被平滑掉。这些突出点构成了真实的可行驶区域边界,为达到精准贴边的目的,不能将其过滤平滑掉,需要传递给下游规划模块。而固态激光雷达所识别的固态激光点云是非重复扫描的方式,相较于按照垂直和水平角度分辨率组织有序的多线机械激光的点云来说,算法处理难度更大。
技术实现思路
1、针对现有技术中固态激光点云数据处理的技术问题,本技术提出了一种道路清扫车可行驶边界检测方法及系统。该方法通过将实时扫描的点云数据与预制地图相结合,得到更高精度的可行驶边界点,实现更准确的贴边检测。
2、根据本发明的一方面,提出了一种道路清扫车可行驶边界检测方法,包括以下步骤:
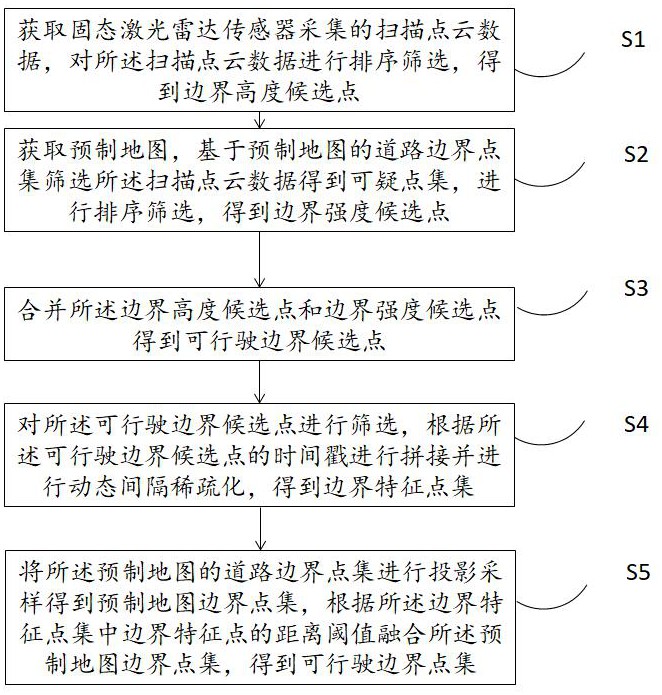
3、s1,获取固态激光雷达传感器采集的扫描点云数据,对所述扫描点云数据进行排序筛选,得到边界高度候选点;
4、s2,获取预制地图,基于预制地图的道路边界点集筛选所述扫描点云数据得到可疑点集,进行排序筛选,得到边界强度候选点;
5、s3,合并所述边界高度候选点和边界强度候选点得到可行驶边界候选点;
6、s4,对所述可行驶边界候选点进行筛选,根据所述可行驶边界候选点的时间戳进行拼接并进行动态间隔稀疏化,得到边界特征点集;
7、s5,将所述预制地图的道路边界点集进行投影采样得到预制地图边界点集,根据所述边界特征点集中边界特征点的距离阈值融合所述预制地图边界点集,得到可行驶边界点集。
8、优选的,步骤s1具体包括:对所述扫描点云数据进行切分排序,形成多个扫描点云bin,建立多个滑动窗口遍历所述扫描点云bin筛选对应的高度候选点存入到索引数组,遍历所述索引数组,确认每个扫描点云bin对应的左侧边界高度候选点和右侧边界高度候选点,所有的扫描点云bin的左侧边界高度候选点和右侧边界高度候选点组成所述边界高度候选点。通过对扫描点云数据的划分、排序、筛选,能够有效查找当前帧点云中的边界高度候选点。
9、进一步优选的,所述预制地图的道路边界点集进行俯视投影变换,设置可行驶边界掩码宽度,得到可行驶边界的道路掩码图像,将所述扫描点云数据进行俯视投影到所述道路掩码图像,筛选所述可疑点集,对所述可疑点集进行切分排序,得到多个可疑点云bin,计算路面平均强度值,遍历所述可疑点云bin,基于所述路面平均强度值筛选左侧边界强度候选点和右侧边界强度候选点,所有可疑点云bin的左侧边界强度候选点和右侧边界强度候选点组成所述边界强度候选点。 通过边界强度候选点与边界高度候选点的结合,得到稠密的边界候选点,以便精准拟合可行驶边界。
10、更进一步优选的,利用所述道路掩码图像对所述可行驶边界候选点进行筛选,对储存多帧所述可行驶边界候选点进行筛选后,以当前帧点云坐标系为基准,根据时间戳将历史帧的可行驶边界候选点的对应位姿转换到当前帧坐标系下进行拼接。通过将多帧点云处理后的可行驶边界候选点进行拼接,进一步减小遗漏重要边界特征点的可能性。
11、进一步优选的,所述动态间隔稀疏化具体包括,照离车身的远近设置动态采样间隔,对拼接后的所述可行驶边界候选点进行采样,得到边界特征点集。通过动态间隔稀疏化对拼接后的行驶边界候选点进行筛选,能够去掉不必要的边界特征点,减少一定的运算量。
12、优选的,对于所述预制地图的道路边界点集进行投影得到对应的投影图像,每隔10个像素点选取所述投影图像的一个像素点进行采样,得到边界像素采样点,再将所述边界像素采样点还原为车体坐标系下的二维坐标,得到所述预制地图边界点集。
13、优选的,s5具体包括遍历所述边界特征点集,根据计算边界特征点的距离阈值,其中表示边界特征点的距离阈值,表示边界特征点的x坐标,表示取括号内数据的绝对值,若所述距离阈值内无临近的边界特征点,对应插入所述预制地图边界点集的预制地图边界点。根据距离阈值融合实时检测的边界点集和预制地图,得到左右可行驶区域的边界点集。
14、根据本发明的一方面,提出了一种道路清扫车可行驶边界检测系统,包括:
15、高度特征筛选模块:获取固态激光雷达传感器采集的扫描点云数据,对所述扫描点云数据进行排序筛选,得到边界高度候选点;
16、强度特征筛选模块:获取预制地图,基于预制地图的道路边界点集筛选所述扫描点云数据得到可疑点集,进行排序筛选,得到边界强度候选点;
17、候选点合并模块:所述边界高度候选点和边界强度候选点得到可行驶边界候选点;
18、候选点处理模块:对所述可行驶边界候选点进行筛选,根据所述可行驶边界候选点的时间戳进行拼接并进行动态间隔稀疏化,得到边界特征点集;
19、可行驶边界点获取模块:将所述预制地图的道路边界点集进行投影采样得到预制地图边界点集,根据所述边界特征点集中边界特征点的距离阈值融合所述预制地图边界点集,得到可行驶边界点集。
20、根据本发明的一方面,提出了一种计算机可读介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实施如第一方面所述的方法。
21、根据本发明的一方面,提出了一种计算系统,包括处理器和存储器,所述处理器被配置为执行如第一方面中任一项所述的方法。
22、本发明的有益之处在于:
23、1)相较于使用多传感器融合探测方案,本发明只使用固态激光雷达单一模态传感器进行检测,成本低廉。
24、2)与只使用地图的方案相比,本发明通过实时可行驶边界检测识别与预制地图相结合,大幅提升无人清扫车贴边清扫精度。。
- 还没有人留言评论。精彩留言会获得点赞!