一种三维点云重建方法、装置及计算机可读存储介质
本发明涉及计算机视觉,尤其是指一种三维点云重建方法、装置及计算机可读存储介质。
背景技术:
1、随着工业技术的不断发展,对工业中常用关键部件的结构复杂性和精度要求日益提高。因此,对关键部件进行精确的三维重建,对于关键部件的设计、制造、性能优化以及故障诊断等方面都具有重要的意义。然而,由于关键部件结构的复杂性和精度要求的严苛性,传统的三维重建技术往往难以满足实际需求。
2、随着科技的不断进步,点云重建技术已取得了显著的发展,成为获取物体表面信息的重要手段。点云数据,作为一种由大量空间坐标点构成的数据集,能够精细地描绘出物体的三维形态,尤其在工业关键部件这类复杂结构的测量中,展现出其独特的优势。然而,点云数据的处理面临着诸多难题。
3、在获取关键部件的三维信息时,往往需要从多个不同的视角进行扫描。然而,如何将从不同视角采集到的关键部件的点云数据精确地对齐并融合,成为了一个亟待攻克的技术难题。点云配准技术正是为了解决这一问题而诞生的。它旨在确保不同视角下的点云数据能够在空间上实现无缝衔接,从而构建出一个完整、精确的三维模型。但现有的点云配准方法在不同角度的点云之间重叠区域特征较少时,难以准确地进行识别与匹配,从而影响配准的准确性。
4、且在实际采集过程中,由于设备精度、环境因素以及关键部件表面复杂性的多重影响,原始的关键部件点云数据中不可避免地会掺杂着大量的噪声和冗余信息。这些噪声和冗余数据不仅加大了数据处理的复杂性和难度,更会对后续的点云配准、尺寸测量等任务造成干扰,从而影响结果的精度和效率。因此,对点云数据进行有效的滤波处理,去除其中的噪声和冗余信息,成为了点云处理中不可或缺的一环。但现有的点云数据的去噪方法主要关注于去除离群点、平滑点云数据等任务,在处理密集噪点时不够有效,无法滤除密集噪点,导致重建精度低,进而导致点云数据中包含离群点和噪声点,这些点可能会对配准结果产生干扰,降低配准的准确性。
5、综上所述,现有的三维重建方法,由于不同角度的点云之间重叠区域特征较少时,难以准确地进行识别与匹配,从而影响配准的准确性,导致获取的三维点云准确性差。且用于配准的不同角度的点云,由于采集后无法滤除密集噪点,导致重建精度低,使得重建点云中包含的离群点与噪声点,进而导致对重建后的点云进行配准时,配准准确性差。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中点云重建精度低,配准准确性差的问题。
2、为解决上述技术问题,本发明提供了一种三维点云重建方法,包括:
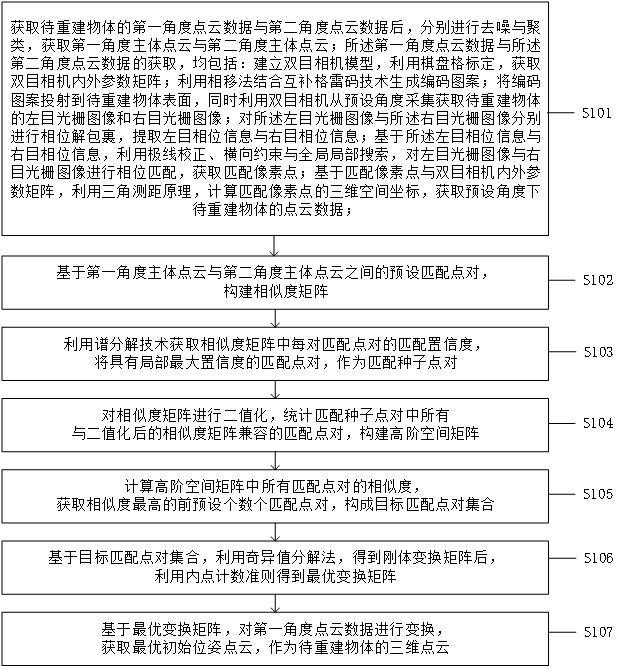
3、获取待重建物体的第一角度点云数据与第二角度点云数据后,分别进行去噪与聚类,获取第一角度主体点云与第二角度主体点云;
4、所述第一角度点云数据与所述第二角度点云数据的获取,均包括:建立双目相机模型,利用棋盘格标定,获取双目相机内外参数矩阵;利用相移法结合互补格雷码技术生成编码图案;将编码图案投射到待重建物体表面,同时利用双目相机从预设角度采集获取待重建物体的左目光栅图像和右目光栅图像;对所述左目光栅图像与所述右目光栅图像分别进行相位解包裹,提取左目相位信息与右目相位信息;基于所述左目相位信息与右目相位信息,利用极线校正、横向约束与全局局部搜索,对左目光栅图像与右目光栅图像进行相位匹配,获取匹配像素点;基于匹配像素点与双目相机内外参数矩阵,利用三角测距原理,计算匹配像素点的三维空间坐标,获取预设角度下待重建物体的点云数据;
5、基于第一角度主体点云与第二角度主体点云之间的预设匹配点对,构建相似度矩阵;
6、利用谱分解技术获取相似度矩阵中每对匹配点对的匹配置信度,将具有局部最大置信度的匹配点对,作为匹配种子点对;
7、对相似度矩阵进行二值化,统计匹配种子点对中所有与二值化后的相似度矩阵兼容的匹配点对,构建高阶空间矩阵;
8、计算高阶空间矩阵中所有匹配点对的相似度,获取相似度最高的前预设个数个匹配点对,构成目标匹配点对集合;
9、基于目标匹配点对集合,利用奇异值分解法,得到刚体变换矩阵后,利用内点计数准则得到最优变换矩阵;
10、基于最优变换矩阵,对第一角度点云数据进行变换,获取最优初始位姿点云,作为待重建物体的三维点云。
11、优选地,对光栅图像进行相位解包裹,包括:
12、利用相移法获取解包裹相位,采集四幅相移差为π/2的条纹图像,表示为:
13、;
14、令初始的四张格雷码的编码值为,新增的互补格雷码编码值为,基于互补格雷码与相移法求解绝对相位值,表示为:
15、;
16、其中,表示利用相移法获取的解包裹相位值,表达式为
17、;为预设背景光强,为预设调制光强,、、、分别表示四张条纹图像中像素点对应灰度值。
18、优选地,获取最优初始位姿点云后,还包括:
19、对最优初始位姿点云与第二角度点云数据分别进行均匀下采样,获取最优下采样点云与第二下采样点云;
20、对于最优下采样点云与第二下采样点云,分别利用kd树获取点云中每个点的近邻点,以及近邻点的fpfh特征,并进行特征匹配,获取最优下采样点云与第二下采样点云之间的对应点对,构建对应点对集;
21、基于对应点对集,获取刚体变换矩阵;基于刚体变换矩阵对最优初始位姿点云进行变换,获取更新的最优下采样点云;
22、计算并基于更新的最优下采样点云与第二角度点云数据的均方根误差进行迭代优化,更新对应点对集、刚体变换矩阵与最优下采样点云,直至均方根误差小于预设阈值,获取最优刚体变换矩阵,作用于最优初始位姿点云,实现点云配准,获取待重建物体的三维重建点云。
23、优选地,更新的最优下采样点云与第二角度点云数据的均方根误差,表示为:
24、;
25、其中,表示更新的最优下采样点云中的点,表示第二角度点云数据中与对应的点,表示对应点对集中点对的总对数。
26、优选地,所述利用谱分解技术获取相似度矩阵中每对匹配点对的匹配置信度,将具有局部最大置信度的匹配点对,作为匹配种子点对,包括:
27、利用谱分解技术对相似度矩阵进行特征分解,获取每对匹配点对的特征向量与特征值;
28、选择特征值最大的特征向量,作为主特征向量:
29、将主特征向量的每个元素都除以该向量的模,获取主特征单位向量;
30、计算每对匹配点对的特征向量与主特征单位向量的点积,作为该对匹配点对的匹配置信度;
31、基于相似度矩阵中每对匹配点对的匹配置信度,获取所有匹配置信度高于其在相似度矩阵中邻近匹配点对匹配置信度的匹配点对,作为匹配种子点对。
32、优选地,对待重建物体的第一角度点云数据与第二角度点云数据进行去噪,包括距离去噪与半径去噪。
33、优选地,对第一角度点云数据与第二角度点云数据进行距离去噪,均包括:
34、设置邻域点个数,根据邻域算法搜索点云数据中每个点的个最近邻点;
35、计算每个点与其个最近邻点距离的均值,表示为:;
36、基于每个点到其个最近邻点的距离,以及距离的均值,计算标准差,表示为:;
37、基于均值、标准差与预设标准差倍数,预设平均距离范围为,将均值不在平均距离范围中的点,认定为噪声点,并剔除,得到距离去噪点云;
38、其中,表示第个点与其第个最近邻点的距离,表示为,;表示第个点的三维坐标,,表示点云数据中点的总个数;表示第个最近邻点的三维坐标。
39、优选地,对第一角度点云数据与第二角度点云数据进行半径去噪,均包括:
40、对于距离去噪点云中的每个点,以其自身为中心,以预设邻域搜索半径为半径,绘制每个点的邻域球;
41、将所有落在邻域球内的点,作为该点的邻域点;
42、获取距离去噪点云中每个点的邻域点个数,将领域点个数小于预设邻域点阈值的点,认定为离群点,并剔除,获取半径去噪点云。
43、优选地,第一角度主体点云与第二角度主体点云的获取,均包括:
44、预设聚类邻域半径,对于半径去噪点云中每个点,将聚类邻域半径内的点个数大于预设密度阈值的点,判定为核心点;
45、基于预设聚类邻域半径,获取每个核心点的邻域;
46、将邻域有交集的核心点划分为一个簇,所有簇的集合为聚类结果;
47、提取聚类结果中最大的簇为主体簇,以主体簇中所有的核心点,构成主体点云。
48、优选地,所述基于第一角度主体点云与第二角度主体点云之间的预设匹配点对,构建相似度矩阵,表示为:
49、;
50、其中,表示相似度矩阵,为单调递减的指数函数;,为欧氏距离计算函数;和为第一角度主体点云与第二角度主体点云中的一对预设匹配点对;和为第一角度主体点云与第二角度主体点云中的另一对预设匹配点对。
51、优选地,所述对相似度矩阵进行二值化,统计匹配种子点对中所有与二值化后的相似度矩阵兼容的匹配点对,构建高阶空间矩阵,包括:
52、对相似度矩阵进行二值化,获取二值化相似度矩阵,其中第i行第j列的元素的值,表示为:;表示预设距离阈值;
53、统计匹配种子点对中所有与二值化后相似度矩阵兼容的匹配点对,得到高阶空间矩阵,表示为:;
54、其中,表示二值化相似度矩阵中第行第列的元素的值,表示二值化相似度矩阵中第行第列的元素的值;表示匹配种子点对的总对数,。
55、本发明实施例还提供了一种三维点云重建装置,包括:
56、主体点云构建模块,用于获取待重建物体的第一角度点云数据与第二角度点云数据后,分别进行去噪与聚类,获取第一角度主体点云与第二角度主体点云;所述第一角度点云数据与所述第二角度点云数据的获取,均包括:建立双目相机模型,利用棋盘格标定,获取双目相机内外参数矩阵;利用相移法结合互补格雷码技术生成编码图案;将编码图案投射到待重建物体表面,同时利用双目相机从预设角度采集获取待重建物体的左目光栅图像和右目光栅图像;对所述左目光栅图像与所述右目光栅图像分别进行相位解包裹,提取左目相位信息与右目相位信息;基于所述左目相位信息与右目相位信息,利用极线校正、横向约束与全局局部搜索,对左目光栅图像与右目光栅图像进行相位匹配,获取匹配像素点;基于匹配像素点与双目相机内外参数矩阵,利用三角测距原理,计算匹配像素点的三维空间坐标,获取预设角度下待重建物体的点云数据;
57、高阶空间矩阵构建模块,用于基于第一角度主体点云与第二角度主体点云之间的预设匹配点对,构建相似度矩阵;利用谱分解技术获取相似度矩阵中每对匹配点对的匹配置信度,将具有局部最大置信度的匹配点对,作为匹配种子点对;对相似度矩阵进行二值化,统计匹配种子点对中所有与二值化后的相似度矩阵兼容的匹配点对,构建高阶空间矩阵;
58、最优变换矩阵构建模块,用于计算高阶空间矩阵中所有匹配点对的相似度,获取相似度最高的前预设个数个匹配点对,构成目标匹配点对集合;基于目标匹配点对集合,利用奇异值分解法,得到刚体变换矩阵后,利用内点计数准则得到最优变换矩阵;
59、配准模块,用于基于最优变换矩阵,对第一角度点云数据进行变换,获取最优初始位姿点云,作为待重建物体的三维点云。
60、本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如上述所述的三维点云重建方法中的步骤。
61、本发明的上述技术方案相比现有技术具有以下有益效果:
62、本发明所述的三维点云重建方法,获取第一角度主体点云与第二角度主体点云后,构建两主体点云之间的相似度矩阵;通过利用相似度矩阵提取第一角度主体点云与第二角度主体点云的匹配种子点对,筛选匹配种子点对中与二值化后的相似度矩阵兼容的匹配点对,构建高阶空间矩阵,来获取匹配点对集合,增加了点云之间的特征,剔除了不匹配的点,提高了重建效率,加速待重建物体三维点云的重建;利用加权奇异值分解匹配点集合得到最优初始位姿后,与第二角度点云数据进行配准,确保不同角度下的点云数据能够准确地融合在一起,获取待重建物体的三维点云。
63、本发明在利用相移法结合互补格雷码技术生成编码图案投射到待重建物体表面后,构建出第一角度点云数据与第二角度点云数据;并通过距离去噪与半径去噪,有效滤除不同类型的离散点后,进行聚类,精确提取出主体点云,解决了传统点云滤波算法在处理点云时去噪效果不佳、难以滤除密集噪点的问题,提高点云数据质量,提高物体重建的准确性和可靠性。且本发明在构建点云数据时,通过引入了互补格雷码的思想,在原有的初始的4张格雷码中最后一张的基础上再增加一倍码字,引进一张互补格雷码进行解码,生成与原有的格雷码解码获得的相位级次偏移1/2个周期的结果,形成编码的互补性,解决边缘跳变误差的问题,提高物体三维点云的重建精度;并采用极线校正的方法结合全局与局部搜索进行相位匹配,提高了双目匹配的效率,提升了物体三维点云重建速度。
64、本发明在获取最优初始位姿点云后,还可以对最优初始位姿点云与第二角度点云数据进行精确配准;通过对两点云降采样,利用kd树加速近邻点搜索,并基于特征匹配进行精确配准,解决了传统点云配准算法存在外点多、配准效果差、效率低的问题,提高了配准速度与精度,使得重建出的三维点云更加准确。
- 还没有人留言评论。精彩留言会获得点赞!