一种基于机器学习的无人叉车堆垛故障定位系统及方法与流程
本发明涉及物流仓储,具体来说,涉及一种基于机器学习的无人叉车堆垛故障定位系统及方法。
背景技术:
1、现今,在现代物流和仓储行业中,无人叉车的广泛应用极大地提高了货物的搬运和堆垛作业效率,同时降低了人工劳动成本。无人叉车通过自动化的操作,不仅减少了人为错误的可能性,还提高了整个物流链的效率和精确性。随着技术的发展,无人叉车在物流和仓储领域的应用越来越广泛,成为了现代物流系统不可或缺的一部分。
2、然而,无人叉车在长时间运行过程中可能会出现各种故障。这些故障可能包括电机故障,如电机过热、损坏或转速不稳定;传感器故障,如激光雷达、编码器等传感器的损坏或故障;以及传动系统故障,如传动带磨损、齿轮损坏等。这些故障不仅会影响无人叉车的正常运行,还可能导致整个仓库作业的中断,进而影响整个物流系统的效率和稳定性。
3、目前,传统的故障诊断方法主要依赖于人工经验和技术人员的现场检查。这种方法往往效率低下,需要较长的时间来诊断故障,而且还可能存在误判的情况。此外,人工诊断方法需要技术人员具备一定的专业知识和经验,对技术人员的素质要求较高。在物流和仓储行业的高效运行需求下,传统的故障诊断方法已经难以满足现代物流系统的需求。因此,本发明提出了一种基于机器学习的无人叉车堆垛故障定位系统及方法。
技术实现思路
1、针对相关技术中的问题,本发明提出一种基于机器学习的无人叉车堆垛故障定位系统及方法,以克服现有相关技术所存在的上述技术问题。
2、为此,本发明采用的具体技术方案如下:
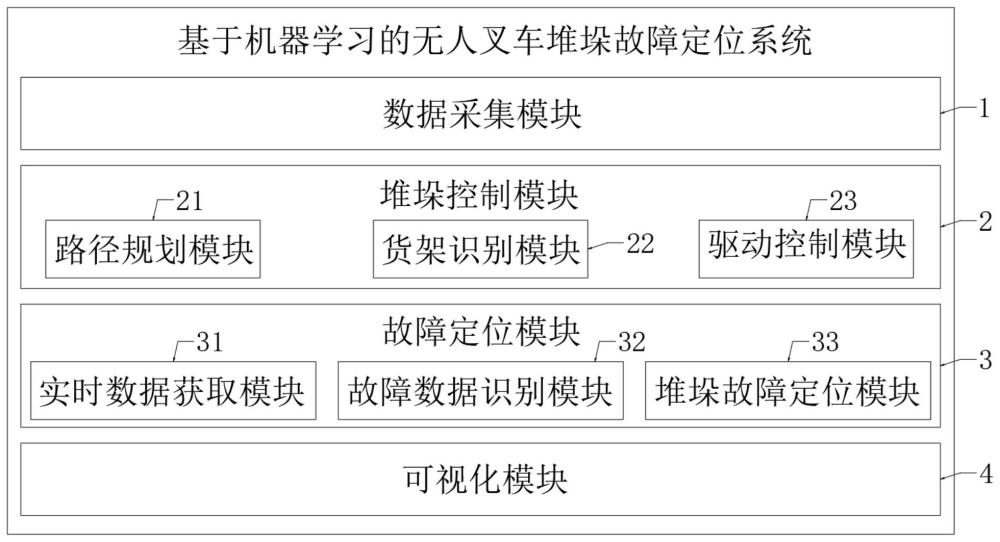
3、根据本发明的一个方面,提供了一种基于机器学习的无人叉车堆垛故障定位系统,包括数据采集模块、堆垛控制模块、故障定位模块及可视化模块;
4、所述数据采集模块,用于通过传感器组件采集无人叉车在运行过程中的实时数据;
5、所述堆垛控制模块,用于识别货架位置和姿态,并基于识别结果控制无人叉车进行堆垛操作;
6、所述故障定位模块,用于根据采集数据通过基于灵敏度的识别算法结合相似度比较法,实现对堆垛故障的检测和定位;
7、所述可视化模块,用于实时显示无人叉车的运行状态、传感器数据和故障诊断结果,自动生成故障报告,并在检测到故障时进行报警;
8、其中,所述故障定位模块包括实时数据获取模块、故障数据识别模块及堆垛故障定位模块;
9、所述实时数据获取模块,用于获取传感器组件采集的实时数据;
10、所述故障数据识别模块,用于基于灵敏度的识别算法实现对实时数据中异常数据的识别;
11、所述堆垛故障定位模块,用于基于相似度比较法结合异常数据的识别结果实现对堆垛故障识别及定位。
12、作为优选地,所述传感器组件包括定位激光雷达、上下激光雷达、拉绳编码器、电机编码器、温度传感器、振动传感器、电流传感器及称重传感器;
13、其中,所述定位激光雷达,用于实时获取无人叉车的位姿数据,以及环境扫描和障碍物检测;
14、所述上下激光雷达,用于分别获取叉齿上货架和地面货架的点云数据;
15、所述拉绳编码器,用于实时获取无人叉车的叉齿高度数据;
16、所述电机编码器,用于获取无人叉车中各电机的实时转速和位移数据;
17、所述温度传感器,用于获取无人叉车中电机和电池的实时温度;
18、所述振动传感器,用于获取无人叉车中的实时机械振动情况;
19、所述电流传感器,用于获取无人叉车中各电气部件的实时电流数据;
20、所述称重传感器,用于获取无人叉车在搬运过程中的实时负载数据。
21、作为优选地,所述堆垛控制模块包括路径规划模块、货架识别模块及驱动控制模块;
22、其中,所述路径规划模块,用于通过路径规划算法结合作业需求设定无人叉车的移动路径;
23、所述货架识别模块,用于通过分析点云数据识别叉齿上货架和地面货架的位置和姿态,并将识别结果反馈给驱动控制模块;
24、所述驱动控制模块,用于根据识别结果结合移动路径,控制无人叉车进行堆垛作业。
25、作为优选地,所述故障数据识别模块在基于灵敏度的识别算法实现对实时数据中异常数据的识别时包括:
26、基于无人叉车的结构和功能,构建等效无向图,其中,等效无向图中的节点表示关键组件和传感器,等效无向图中的边表示数据流或影响关系;
27、对获取的实时数据进行灵敏度分析,确定影响无人叉车运行状态的关键数据;并基于蚁群优化算法筛选出对无人叉车状态监测的关键数据点;
28、实时监控筛选出的关键数据点并进行标准化处理,计算关键数据点的标准化残差;
29、分析比较关键数据点的标准化残差与预设标准化残差阈值,并将超过阈值的关键数据点标记为异常数据。
30、作为优选地,所述对获取的实时数据进行灵敏度分析,确定影响无人叉车运行状态的关键数据包括:
31、根据无人叉车的物理特性和控制逻辑建立状态方程,将无人叉车的状态与控制指令进行关联,并对建立的状态方程进行线性化处理,得到线性化的状态空间模型;
32、计算状态方程的雅可比矩阵,其中,雅可比矩阵的每一列表示对应状态变量对各个控制指令的偏导数;分析雅可比矩阵中的元素,确定对控制指令的敏感度高于预设阈值的状态变量;
33、根据雅可比矩阵的分析结果对状态变量进行灵敏度排序,并根据灵敏度排序的结果筛选出影响无人叉车运行状态的关键数据。
34、作为优选地,所述基于蚁群优化算法筛选出对无人叉车状态监测的关键数据点包括:
35、初始化蚂蚁种群,并在等效无向图的每条边上初始化信息素;定义路径长度及转移概率;
36、基于转移概率,蚂蚁选择下一步的路径,并在完成单次循环后根据所选路径的质量更新信息素,其中,信息素更新包括局部更新和全局更新;
37、判断是否达到最大迭代次数或全局最优路径,若否,则继续迭代,若是,则将筛选出的最优路径中的数据点定义为关键数据点。
38、作为优选地,所述转移概率的计算公式为:
39、
40、信息素更新的公式为:
41、
42、式中, τij( t)表示 t时刻从节点 i到节点 j的信息素浓度; ηij( t)表示 t时刻从节点 i到节点 j的启发式信息; s表示待转移的点; tk表示蚂蚁 k的禁忌表; α和 β分别表示信息素和启发式信息的重要程度系数; ρ表示信息素蒸发率; δτij表示从节点 i到节点 j的信息素增量。
43、作为优选地,所述堆垛故障定位模块在基于相似度比较法结合异常数据的识别结果实现对堆垛故障识别及定位时包括:
44、获取当前无人叉车的异常数据,通过局域网与仓库内的其他无人叉车进行连接,并识别相同型号的无人叉车;
45、判断相同型号无人叉车的历史数据库中是否存在与当前无人叉车的异常数据相似的历史数据,若否,则利用预先构建好的故障检测模型结合当前无人叉车的异常数据实现对堆垛故障的识别和定位,若是,则执行下一步;
46、根据相似数据的判断结果实现对无人叉车的筛选,基于无人叉车的工作环境、负载类型、货架种类及货架布局,利用相似度比较法结合预设的权重因子计算当前叉车与筛选出的无人叉车的作业条件相似度;
47、基于作业条件相似度的排序结果确定与当前无人叉车状态最相似的无人叉车,并根据该无人叉车历史数据库中的相似历史数据确定当前无人叉车的故障类别及故障位置。
48、作为优选地,所述作业条件相似度的计算公式为:
49、
50、式中, s( a, b)表示无人叉车 a和无人叉车 b的作业条件相似度; w1、 w2、 w3、 w4分别表示工作环境、负载类型、货架种类及货架布局的权重因子; se、 sl、 sh、 sb分别表示工作环境、负载类型、货架种类及货架布局的相似度。
51、根据本发明的另一个方面,提供了一种基于机器学习的无人叉车堆垛故障定位方法,该基于机器学习的无人叉车堆垛故障定位方法包括以下步骤:
52、s1、通过传感器组件采集无人叉车在运行过程中的实时数据;
53、s2、识别货架位置和姿态,并基于识别结果控制无人叉车进行堆垛操作;
54、s3、根据采集数据通过基于灵敏度的识别算法结合相似度比较法,实现对堆垛故障的检测和定位;
55、s4、实时显示无人叉车的运行状态、传感器数据和故障诊断结果,自动生成故障报告,并在检测到故障时进行报警。
56、与现有技术相比,本发明提供了基于机器学习的无人叉车堆垛故障定位系统及方法,具备以下有益效果:
57、(1)本发明通过集成多种传感器实时采集叉车运行数据,并结合先进的机器学习算法,实现对故障的自动检测和定位,其不仅可以提高故障诊断的准确性,而且还可以大大提高诊断效率,减少人工干预的需要,从而更好地满足现代物流和仓储行业的高效运行需求。
58、(2)本发明不仅可以利用基于灵敏度的识别算法识别出微小的异常数据变化,提高故障检测的敏感性,而且还可以通过蚁群优化算法筛选出对无人叉车状态监测的关键数据点,提高故障诊断的针对性,从而可以快速准确地检测出堆垛过程中的异常数据,从而及时发现潜在的故障。
59、(3)本发明可以利用局域网内相同型号无人叉车的历史数据作为参考,通过比较当前无人叉车的异常数据与历史数据的相似度来决定后续的故障识别和定位策略,当相同型号无人叉车的历史数据中不存在相似数据时,则可以利用预先构建的故障检测模型结合当前无人叉车的异常数据来实现对堆垛故障的识别和定位,从而可以有效地处理新的或未曾遇到过的故障情况,当相同型号无人叉车的历史数据中存在相似数据时,则可以基于作业条件相似度的排序结果来确定最相似的无人叉车,并根据相似历史数据确定故障类别及故障位置,从而可以快速确定故障的类别和位置,能够充分利用历史数据中的信息来提高故障诊断的准确性和效率。
- 还没有人留言评论。精彩留言会获得点赞!