一种喷涂路径测试验证及其可视化方法与流程
本发明涉及喷涂,尤其涉及一种喷涂路径测试验证及其可视化方法。
背景技术:
1、喷涂通过喷枪或碟式雾化器,借助于压力或离心力,分散成均匀而微细的雾滴,施涂于被涂物表面的涂装方法,利用喷涂技术,可以在各种工业制品上获得具有耐磨、耐蚀、隔热、导电、绝缘、密封、润滑以及其他特殊机械的物理、化学性能的涂层,是制造和表面处理中重要的环节。随着制造智能化的不断提高,如今许多制造产线上的喷涂工艺都由工业机器人来完成,将喷枪安装在机器人末端后,工程师为机器人设定好喷涂路径后,将需要喷涂加工的产品固定在可转动的支架上,即可实现全自动喷涂。因此喷涂的质量主要取决于喷涂路径的规划是否合理,机器人末端携带着喷枪移动经过的实际路径和移动中的行进速度均会影响最终喷涂在加工工件上是否均匀,而如果直接用实物工件去对喷涂路径进行验证,不但耗费时间和人力而且试错成本巨大,因此需要一种在计算机上实现对喷涂路径模拟及其对喷涂质量的测试和验证的方法。
技术实现思路
1、针对背景技术提出的问题,本发明的目的在于提出一种喷涂路径测试验证及其可视化方法,解决了现有的喷涂技术费时费力,试错成本高的问题。
2、为达此目的,本发明采用以下技术方案:
3、一种喷涂路径测试验证及其可视化方法,包括以下步骤:
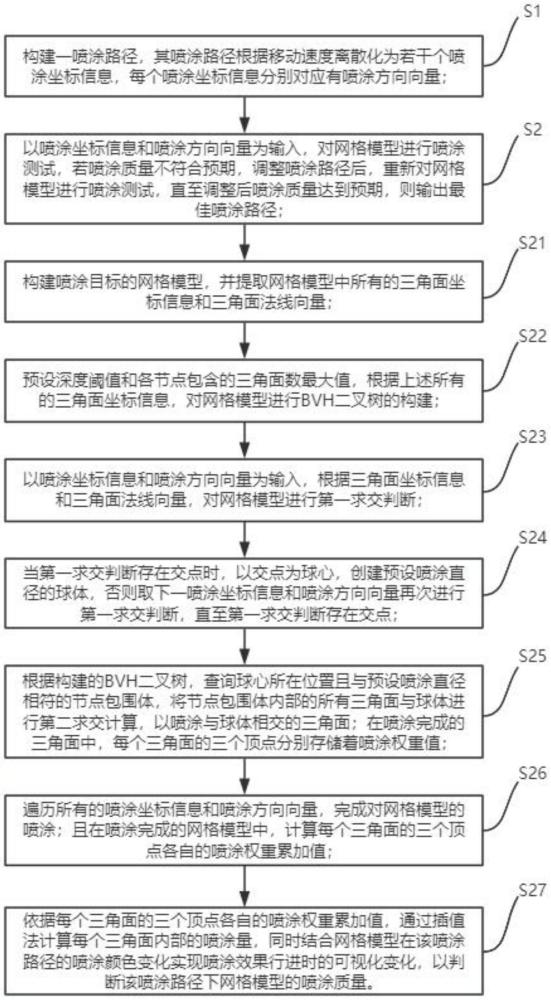
4、s1、构建一喷涂路径,其喷涂路径根据移动速度离散化为若干个喷涂坐标信息,每个喷涂坐标信息分别对应有喷涂方向向量;
5、s2、以喷涂坐标信息和喷涂方向向量为输入,对网格模型进行喷涂测试,若喷涂质量不符合预期,调整喷涂路径后,重新对网格模型进行喷涂测试,直至调整后喷涂质量达到预期,则输出最佳喷涂路径;
6、其中,对于网格模型的喷涂测试的过程,具体包括:
7、s21、构建喷涂目标的网格模型,并提取网格模型中所有的三角面坐标信息和三角面法线向量;
8、s22、预设深度阈值和各节点包含的三角面数最大值,根据上述所有的三角面坐标信息,对网格模型进行bvh二叉树的构建;在构建完成的bvh二叉树中,每个节点存储的是该节点中所包含的三角面的节点包围体;
9、s23、以喷涂坐标信息和喷涂方向向量为输入,根据三角面坐标信息和三角面法线向量,对网格模型进行第一求交判断;
10、s24、当第一求交判断存在交点时,以交点为球心,创建预设喷涂直径的球体,否则取下一喷涂坐标信息和喷涂方向向量再次进行第一求交判断,直至第一求交判断存在交点;
11、s25、根据构建的bvh二叉树,查询球心所在位置且与预设喷涂直径相符的节点包围体,将节点包围体内部的所有三角面与球体进行第二求交计算,以喷涂与球体相交的三角面;在喷涂完成的三角面中,每个三角面的三个顶点分别存储着喷涂权重值;
12、s26、遍历所有的喷涂坐标信息和喷涂方向向量,完成对网格模型的喷涂;且在喷涂完成的网格模型中,计算每个三角面的三个顶点各自的喷涂权重累加值;
13、s27、依据每个三角面的三个顶点各自的喷涂权重累加值,通过插值法计算每个三角面内部的喷涂量,同时结合网格模型在该喷涂路径的喷涂颜色变化实现喷涂效果行进时的可视化变化,以判断该喷涂路径下网格模型的喷涂质量。
14、优选地,在s22中,对于bvh二叉树的构建的过程,具体包括:
15、s221、以最小且能包裹网格模型的包围体为模型包围体;
16、s222、根据三角面坐标信息,以三角面的三个顶点在三个方向上(x轴、y轴和z轴)的最大值求出的包围体为三角面包围体;
17、s223、遍历所有的三角面坐标信息,将所有的三角面包围体按任一方向上位置的排序,形成有序序列组;
18、s224、将模型包围体作为根节点进行bvh二叉树的递归构造:查询当前节点在有序序列组上处于中间值的三角面包围体,以此为分界线,将当前节点分为左右两部分分别作为当前节点的左右子节点,判断两个子节点是否达到预设深度阈值或节点包含的三角面数最大值,若满足其一,则结束该子节点的递归构造,否则进行该子节点的递归构造,如此反复直至所有节点结束递归,bvh二叉树则构建完成;其中,每个节点存储的是该节点中所包含的三角面的节点包围体。
19、优选地,在s23中,对于第一求交判断的过程,具体包括:
20、s231、记喷涂坐标信息为v,喷涂方向向量为d,喷涂方向射线函数:
21、v+dt=p;
22、其中,p为喷涂射线上的点;t>0,根据t的取值不同,可得到喷涂射线上不同的点p;
23、s232、取三角面坐标信息中其一顶点为a,三角面法线向量为n,三角面上的向量为a-p,三角面所在平面的函数:
24、(a-p)·n=0;
25、s233、根据喷涂方向射线函数和三角面所在的平面函数,得到交点参数t:
26、
27、s234、将交点参数t代入喷涂方向射线函数中,得到交点t;
28、s235、记三角面的三个顶点为a、b、c,若交点t存在于三角面abc内,则三角面abt、三角面bct、三角面cat的面积之和应等于三角面abc的面积,表示为:
29、|ab×bt|+|bc×ct|+|ca×at|=|ab×bc|;
30、即第一求交判断交点t存在于三角面abc内。
31、优选地,在s25中,根据构建的bvh二叉树,查询球心所在位置且与预设喷涂直径相符的节点包围体,
32、其查询的顺序为:首先查询到球心所在位置的最大的节点包围体,其次判断该节点包围体的大小是否与预设喷涂直径的球体的大小相近,若不相近,则通过bvh二叉树前往该子节点包围体进行判断,若相近,则查询结束,此时的节点包围体为查询所需的节点包围体;或该节点包围体为结束递归时的最小节点包围体,则查询结束,此时的节点包围体为查询所需的节点包围体。
33、优选地,在s25中,对于第二求交计算的过程,具体包括:
34、满足于三角面的三个顶点至少有一个在球体的内部;或三个顶点都在球体的外部,但至少有一条线段与球体相交;或三个顶点、三条边都在球体的外部,但三角面所处的平面与球体相交;则此三角面与球体相交;
35、遍历节点包围体内部的所有三角面与球体进行第二求交计算。
36、优选地,在s25中,在喷涂完成的三角面中,每个三角面的三个顶点分别存储着喷涂权重值,其喷涂权重值的定义以球心所在位置的喷涂权值为1,并向半径方向衰减直至达到半径的边缘的喷涂权重值为0;
37、根据三角面的三个顶点到球心所在位置的实际距离,计算三个顶点分别的喷涂权重值。
38、优选地,所述向半径方向衰减由喷涂速度值控制,满足于:
39、
40、其中,er为所述向半径方向衰减的因数,v为所述喷涂速度,r为所述球体的半径。
41、优选地,在s27中,通过插值法计算每个三角面内部的喷涂量,具体包括:
42、(1)记一个三角面中三个顶点的喷涂权重累加值分别为c1、c2、c3,取该三角面内部的任意一点为e,该点达到各顶点的距离分别为d1、d2、d3,求解该点的喷涂权重累加值,插值法的计算公式为:
43、
44、其中,ce为e点的喷涂权重累加值;
45、(2)对于网格模型的每个三角面,在其内部随机取若干个点通过插值计算出喷涂权重累加值,并取平均值得到该三角面的喷涂量。
46、优选地,在s27中,对于判断网格模型的喷涂质量,具体包括:
47、(1)根据插值法获取每个三角面内部的喷涂量,通过计算标准差或方差判断所有三角面的喷涂量的均匀分布程度;
48、(2)定义三角面的喷涂量以1为标准,预设最低期望喷涂量为x,实际喷涂量为y:
49、当0<x<y<1时,实际喷涂量y为可接受的喷涂量;
50、当y<x时,实际喷涂量y为欠喷涂的喷涂量;
51、当y>1时,实际喷涂量y为过喷涂的喷涂量;
52、计算所有可接受的喷涂量的三角面数占所有三角面的百分比,作为喷涂质量的合格率;
53、(3)根据均匀分布程度和喷涂质量的合格率,同时结合网格模型在该喷涂路径的喷涂颜色变化实现喷涂效果行进时的可视化变化,判断该喷涂路径下喷涂质量是否达到预期,以输出最佳喷涂路径。
54、优选地,所述网格模型为有限元fea网格模型;在所述fea网格模型中,节点包围体为aabb类包围体。
55、与现有技术相比,上述技术方案中的一个技术方案具有以下有益效果:
56、本发明通过构建一喷涂路径,其喷涂路径根据移动速度离散化为若干个喷涂坐标信息;以网格模型为基础,通过构建bvh二叉树,以便后续能够快速查询到网格模型中的某一个三角面,随后将根据喷涂坐标信息进行对网格模型进行第一求交判断,以交点为球心,创建预设喷涂直径的球体,然后根据bvh二叉树查询与球体满足于第二求交计算的所有三角面,将这部分的三角面喷涂,其材质颜色改为喷涂颜色,在渲染中实现喷涂效果的可视化。根据三角面顶点存储的喷涂权重值,最终搜索完所有喷涂坐标信息,得到的网格模型每个三角面中的喷涂权重累加值即是喷涂量的模拟值,对喷涂权重累加值判断喷涂质量是否符合预期,以输出最佳喷涂路径。提供了一种喷涂路径测试验证及其可视化方法,设计过程中可以根据具体的网格模型调节预设参数从而进行喷涂路径的优化,整个过程采用计算机辅助设计,节省时间和人力而且降低试错成本,操作简单快捷,可视化好,提高喷涂效率和质量。
- 还没有人留言评论。精彩留言会获得点赞!