一种基于清洁机器人的参数化仿真模型设计方法及系统与流程
本发明涉及计算机处理,尤其涉及一种基于清洁机器人的参数化仿真模型设计方法及系统。
背景技术:
1、在当今社会,清洁机器人作为自动化家庭和商业环境清洁的重要工具,其设计和性能优化对提升清洁效率和用户体验至关重要。近年来,随着计算机仿真技术的进步和虚拟现实技术的应用,新型基于清洁机器人的参数化仿真模型设计方法开始受到关注,这些方法利用先进的数值计算技术、多物理场耦合分析和实时数据交互,能够建立高度精细化的仿真模型,通过将机器人的物理结构、传感器系统和清洁路径等关键参数进行参数化建模,并结合实地采集的操作数据和环境信息,可以实现对清洁机器人在不同场景下性能和效率的动态仿真评估。然而,现有技术中的仿真模型虽然能够在一定程度上帮助设计优化,但往往缺乏精确度,无法充分反映机器人在实际加水操作场景中的复杂动态变化。
技术实现思路
1、基于此,本发明有必要提供一种基于清洁机器人的参数化仿真模型设计方法及系统,以解决至少一个上述技术问题。
2、为实现上述目的,一种基于清洁机器人的参数化仿真模型设计方法,包括以下步骤:
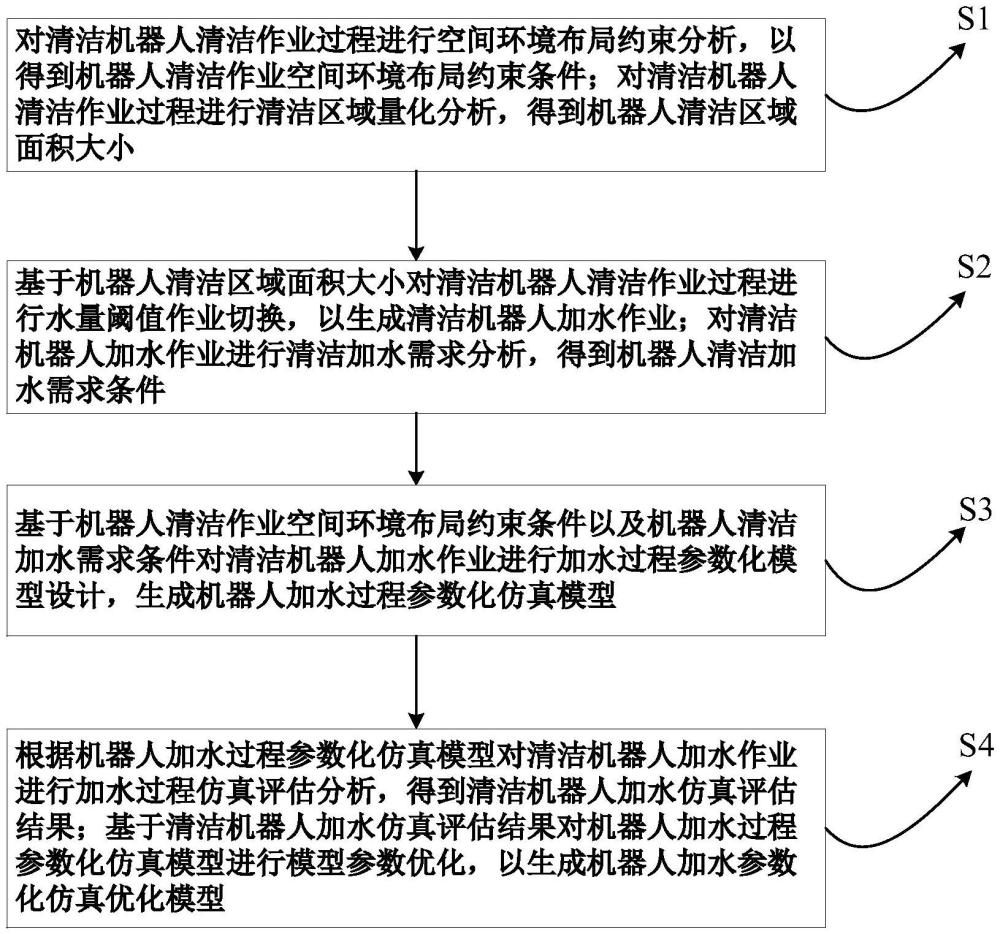
3、步骤s1:对清洁机器人清洁作业过程进行空间环境布局约束分析,以得到机器人清洁作业空间环境布局约束条件;对清洁机器人清洁作业过程进行清洁区域量化分析,得到机器人清洁区域面积大小;
4、步骤s2:基于机器人清洁区域面积大小对清洁机器人清洁作业过程进行水量阈值作业切换,以生成清洁机器人加水作业;对清洁机器人加水作业进行清洁加水需求分析,得到机器人清洁加水需求条件;
5、步骤s3:基于机器人清洁作业空间环境布局约束条件以及机器人清洁加水需求条件对清洁机器人加水作业进行加水过程参数化模型设计,生成机器人加水过程参数化仿真模型;
6、步骤s4:根据机器人加水过程参数化仿真模型对清洁机器人加水作业进行加水过程仿真评估分析,得到清洁机器人加水仿真评估结果;基于清洁机器人加水仿真评估结果对机器人加水过程参数化仿真模型进行模型参数优化,以生成机器人加水参数化仿真优化模型。
7、本发明首先通过对清洁机器人清洁作业过程进行空间环境布局约束分析,以分析模型中的环境布局约束条件,能够精确评估机器人在执行清洁任务过程中遇到的各种环境布局限制和挑战,这种约束分析涵盖了空间布局中的物理障碍、运动路径的限制、安全距离要求等方面,从而为机器人设计安全可靠的操作路径和行为规则提供了必要的依据。通过有效的约束分析,可以预测并避免潜在的操作风险,并确保机器人在各种情况下都能稳定、高效地完成任务,从而能够更好地适应清洁机器人在实际作业过程中空间布局的动态变化。同时,通过对清洁机器人清洁作业过程进行清洁区域面积的量化分析,能够精确测量每个清洁区域的大小和面积,为任务分配和资源规划提供了重要数据支持,这种量化分析不仅有助于合理安排清洁机器人的工作负载,还能够帮助评估清洁作业的进展和效果,通过准确了解每个区域的尺寸,可以为后续的处理过程提供了基础数据保障,确保在最短时间内完成最大程度的清洁覆盖,从而提升后续清洁加水作业的整体效率和效果。其次,通过基于机器人清洁区域面积大小对清洁机器人清洁作业过程进行需求水量阈值的影响核算,以进一步确定了机器人清洁作业过程中的需求水量阈值,并通过根据需求水量阈值对清洁机器人清洁作业过程中的清洁机器人水箱水量进行比较判断,以将水箱水量低于需求水量阈值相对应清洁机器人的作业模式切换为加水作业模式,确保在必要时及时为清洁区域补充所需的水量。通过对清洁机器人加水作业进行清洁加水需求分析,这一分析包括了加水时机、加水量的精确计算以及加水操作的实施条件,旨在确保清洁机器人在整个作业过程中能够灵活、高效地响应不同清洁区域的实际需求,通过这些详细的需求分析,能够最大限度地提升清洁加水作业的执行效率和精确度。然后,通过基于机器人清洁作业空间环境布局约束条件以及机器人清洁加水需求条件对清洁机器人加水作业进行加水过程参数化模型设计,这一步骤涵盖了仿真模型的实际执行过程,通过运行仿真模拟不同加水条件下的实际效果,这不仅可以量化评估清洁机器人加水作业的效率和成本效益,还可以为优化作业流程和技术提供重要的数据支持,以确保在实际应用中达到最佳的清洁加水效果和资源利用效率。最后,通过根据机器人加水过程参数化仿真模型对清洁机器人加水作业进行加水过程仿真评估分析,能够了深入理解不同加水仿真参数条件下清洁机器人加水作业的效果和性能表现,这一步骤通过评估分析可以包括对加水效率、作业时间、水资源利用率等方面的量化分析,从而全面评估模型在实际应用中的应对能力和优化空间,能够为后续的模型优化和实际应用提供了指导,并帮助决策者更好地理解和利用仿真模型的数据输出。此外,还通过基于清洁机器人加水仿真评估结果对机器人加水过程参数化仿真模型进行模型参数优化,以分析评估结果中的局限性和优化空间,可以对机器人加水过程参数化仿真模型进行进一步调整和优化,这涉及到改进仿真算法、调整模型输入参数、优化控制策略等方面,旨在提高参数化模型的准确度和逼真度,使其更加贴近实际场景并具有更好的应用价值,从而能够充分反映了清洁机器人在实际加水作业场景中的复杂动态变化。
8、优选地,本发明还提供了一种基于清洁机器人的参数化仿真模型设计系统,用于执行如上所述的基于清洁机器人的参数化仿真模型设计方法,该基于清洁机器人的参数化仿真模型设计系统包括:
9、清洁机器人清洁约束量化分析模块,用于对清洁机器人清洁作业过程进行空间环境布局约束分析,以得到机器人清洁作业空间环境布局约束条件;对清洁机器人清洁作业过程进行清洁区域量化分析,从而得到机器人清洁区域面积大小;
10、机器人加水需求条件分析模块,用于基于机器人清洁区域面积大小对清洁机器人清洁作业过程进行水量阈值作业切换,以生成清洁机器人加水作业;对清洁机器人加水作业进行清洁加水需求分析,从而得到机器人清洁加水需求条件;
11、机器人参数化仿真模型设计模块,用于基于机器人清洁作业空间环境布局约束条件以及机器人清洁加水需求条件对清洁机器人加水作业进行加水过程参数化模型设计,从而生成机器人加水过程参数化仿真模型;
12、清洁机器人加水仿真模型优化模块,用于根据机器人加水过程参数化仿真模型对清洁机器人加水作业进行加水过程仿真评估分析,得到清洁机器人加水仿真评估结果;基于清洁机器人加水仿真评估结果对机器人加水过程参数化仿真模型进行模型参数优化,以生成机器人加水参数化仿真优化模型。
13、综上所述,本发明提供了一种基于清洁机器人的参数化仿真模型设计系统,该基于清洁机器人的参数化仿真模型设计系统由清洁机器人清洁约束量化分析模块、机器人加水需求条件分析模块、机器人参数化仿真模型设计模块以及清洁机器人加水仿真模型优化模块组成,能够实现本发明所述任意基于清洁机器人的参数化仿真模型设计方法,用于联合各个模块上运行的计算机程序之间的操作实现基于清洁机器人的参数化仿真模型设计方法,系统内部结构互相协作,这样能够大大减少重复工作和人力投入,能够快速有效地提供更为准确、更高效的基于清洁机器人的参数化仿真模型设计过程,从而简化了基于清洁机器人的参数化仿真模型设计系统的操作流程。
- 还没有人留言评论。精彩留言会获得点赞!