对象安全确定方法、装置、计算机设备和存储介质与流程
本技术涉及定位,特别是涉及一种对象安全确定方法、装置、计算机设备和存储介质。
背景技术:
1、随着基建工程的大量建设,基建数字孪生系统建设也逐渐增多,在基建数字孪生系统的建设中,高精度位置定位管理是至关重要的一环;通过数字孪生系统和高精度定位技术,管理人员可以实时监控场地内所有人员和车辆的位置,从而更有效地调配资源。另外,高精度定位可以及时发现人员或车辆是否进入了危险区域,并及时发出警告或采取紧急措施。
2、目前,传统技术中的定位技术包括蓝牙定位、全球定位系统(global positioningsystem,gps)和超宽带(ultra wide band,uwb)高精度定位。基于蓝牙定位范围与区域比较窄,需要投入的蓝牙设备比较多,定位不精准;基于gps定位是基于高空微信信号实现的,对于室内和基建洞室,无法使用;uwb定位左右有源头信号定位装置,需要在定位区域安装大量的定位信号源,软硬件投入非常大。
3、因此,目前仍缺乏适用于基建数字孪生系统的准确性较高的定位技术,亟需改进。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高定位准确性的对象安全确定方法、装置、计算机设备和存储介质。
2、第一方面,本技术提供了一种对象安全确定方法,该方法包括:
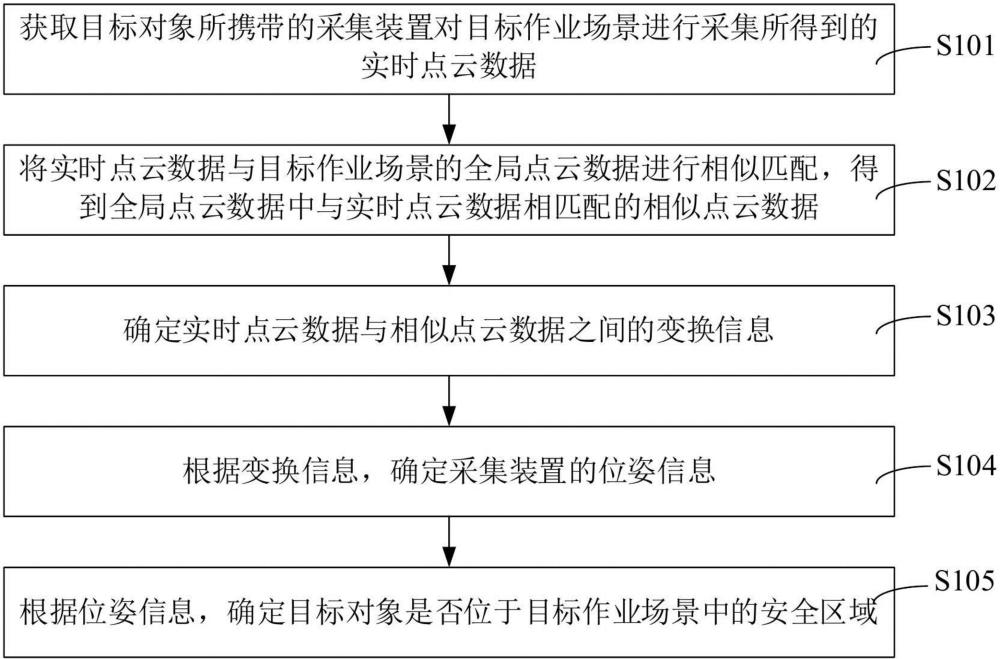
3、获取目标对象所携带的采集装置对目标作业场景进行采集所得到的实时点云数据;
4、将实时点云数据与目标作业场景的全局点云数据进行相似匹配,得到全局点云数据中与实时点云数据相匹配的相似点云数据;
5、确定实时点云数据与相似点云数据之间的变换信息;其中,变换信息包括缩放比例关系、位置偏移量和朝向偏移量中的至少一种;
6、根据变换信息,确定采集装置的位姿信息;
7、根据位姿信息,确定目标对象是否位于目标作业场景中的安全区域。
8、在其中一个实施例中,将实时点云数据与目标作业场景的全局点云数据进行相似匹配,得到全局点云数据中与实时点云数据相匹配的相似点云数据,包括:
9、获取目标作业场景的全局点云数据;
10、根据实时点云数据生成第一特征点直方图,根据全局点云数据生成第二特征点直方图;
11、将第一特征点直方图和第二特征点直方图进行比对,得到第二特征点直方图中与第一特征点直方图重叠的目标区域;
12、将目标区域对应的点云数据,确定为全局点云数据中与实时点云数据相匹配的相似点云数据。
13、在其中一个实施例中,确定实时点云数据与相似点云数据之间的变换信息,包括:
14、对实时点云数据进行解析,得到至少一个第一对象;
15、对相似点云数据进行解析,得到至少一个第二对象;
16、根据各第一对象和各第二对象之间的相似关系,确定至少一个相似对象对;其中,每一相似对象对包括一个第一对象和一个第二对象;
17、确定各相似对象对中第一对象和第二对象之间的变换信息;
18、根据各相似对象对对应的变换信息,确定实时点云数据与相似点云数据之间的变换信息。
19、在其中一个实施例中,根据各相似对象对对应的变换信息,确定实时点云数据与相似点云数据之间的变换信息,包括:
20、将各相似对象对对应的变换信息的均值,确定为实时点云数据与相似点云数据之间的变换信息。
21、在其中一个实施例中,根据变换信息,确定采集装置的位姿信息,包括:
22、根据变换信息和相似点云数据对应的采集设备的位姿信息,确定采集装置的位姿信息。
23、在其中一个实施例中,根据位姿信息,确定目标对象是否位于目标作业场景中的安全区域,包括:
24、获取目标作业场景内电子围栏的位置信息;
25、将位姿信息中的位置信息与电子围栏的位置信息进行比对,判断目标对象是否位于目标作业场景中的安全区域。
26、在其中一个实施例中,该方法还包括:
27、若采集装置位于目标作业场景中的安全区域之外,则启动采集装置对应的图像设备;
28、控制图像采集设备,获取采集装置位置处的图像信息;
29、若图像信息中包含障碍物信息,则输出提示信息。
30、第二方面,本技术还提供了一种对象安全确定装置,该装置包括:
31、获取模块,用于获取目标对象所携带的采集装置对目标作业场景进行采集所得到的实时点云数据;
32、匹配模块,用于将实时点云数据与目标作业场景的全局点云数据进行相似匹配,得到全局点云数据中与实时点云数据相匹配的相似点云数据;
33、变换模块,用于确定实时点云数据与相似点云数据之间的变换信息;其中,变换信息包括缩放比例关系、位置偏移量和朝向偏移量中的至少一种;
34、位姿确定模块,用于根据变换信息,确定采集装置的位姿信息;
35、安全定位模块,用于根据位姿信息,确定目标对象是否位于目标作业场景中的安全区域。
36、第三方面,本技术还提供了一种计算机设备,该计算机设备包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现以下步骤:
37、获取目标对象所携带的采集装置对目标作业场景进行采集所得到的实时点云数据;
38、将实时点云数据与目标作业场景的全局点云数据进行相似匹配,得到全局点云数据中与实时点云数据相匹配的相似点云数据;
39、确定实时点云数据与相似点云数据之间的变换信息;其中,变换信息包括缩放比例关系、位置偏移量和朝向偏移量中的至少一种;
40、根据变换信息,确定采集装置的位姿信息;
41、根据位姿信息,确定目标对象是否位于目标作业场景中的安全区域。
42、第四方面,本技术还提供了一种计算机可读存储介质,该计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
43、获取目标对象所携带的采集装置对目标作业场景进行采集所得到的实时点云数据;
44、将实时点云数据与目标作业场景的全局点云数据进行相似匹配,得到全局点云数据中与实时点云数据相匹配的相似点云数据;
45、确定实时点云数据与相似点云数据之间的变换信息;其中,变换信息包括缩放比例关系、位置偏移量和朝向偏移量中的至少一种;
46、根据变换信息,确定采集装置的位姿信息;
47、根据位姿信息,确定目标对象是否位于目标作业场景中的安全区域。
48、上述对象安全确定方法、装置、计算机设备和存储介质,本技术通过比对实时点云数据和全局点云数据,这种方法能够实现高精度的定位,点云数据本身包含了丰富的三维空间信息,因此比对的结果能够准确地反映出采集装置(即目标对象)在全局坐标系中的位置和姿态;通过仅依赖点云数据的比对,这种方法简化了定位过程。相比于传统定位方法需要结合多种传感器数据和复杂的算法,而这种方法仅需要处理点云数据,从而降低了定位的复杂度;进一步的,由于点云数据比对的方法不依赖于特定的硬件或环境特征,因此它可以应用于多种不同的场景,包括室内、室外、复杂环境等;另外,本技术不需要安装额外的硬件定位装置,如gps接收器、信标或其他传感器,更加适用于基建数字孪生系统。
- 还没有人留言评论。精彩留言会获得点赞!