一种基于机载激光雷达的电力线点云提取方法及装置与流程
本发明属于机载lidar点云数据处理,尤其涉及一种基于机载激光雷达的电力线点云提取方法及装置。
背景技术:
1、近些年来中国电力网络规模快速扩大,为了满足不断增长的需求,电力供应也在不断改进和扩张。与此同时,输电线路故障带来的潜在风险也不可忽视,输电线路故障可能导致大面积停电,这对人们的日常生产生活和国家经济带来巨大损失,电力线检查和维护领域具有至关重要的作用。
2、基于机载激光雷达的输电线路走廊三维信息采集可以得到海量的点云数据。高效准确地实现线路走廊内的地物、杆塔、电力线及相关附属设施的点云数据的分割提取能有效提升该项技术的时效性和工程应用价值。其中,电力线点云的准确识别及提取是电力线拟合重建的关键和前提,也是电力巡线和后续应用分析评估的基础数据,关系到输电线路三维实景量测评估的应用效果。目前针对激光雷达点云数据进行电力线精提取的方法研究方法主要是根据点云的高程信息,未充分考虑点云领域维度特征,现有电力线提取方法在算法的可靠性与通用性方面尚有不足,电力线提取精度仍有待提高。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于机载激光雷达的电力线点云提取方法及装置,以解决现有电力线点云提取方法在算法的可靠性与通用性方面不足的问题,提高了电力线提取精度。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、一种基于机载激光雷达的电力线点云提取方法,包括以下步骤:
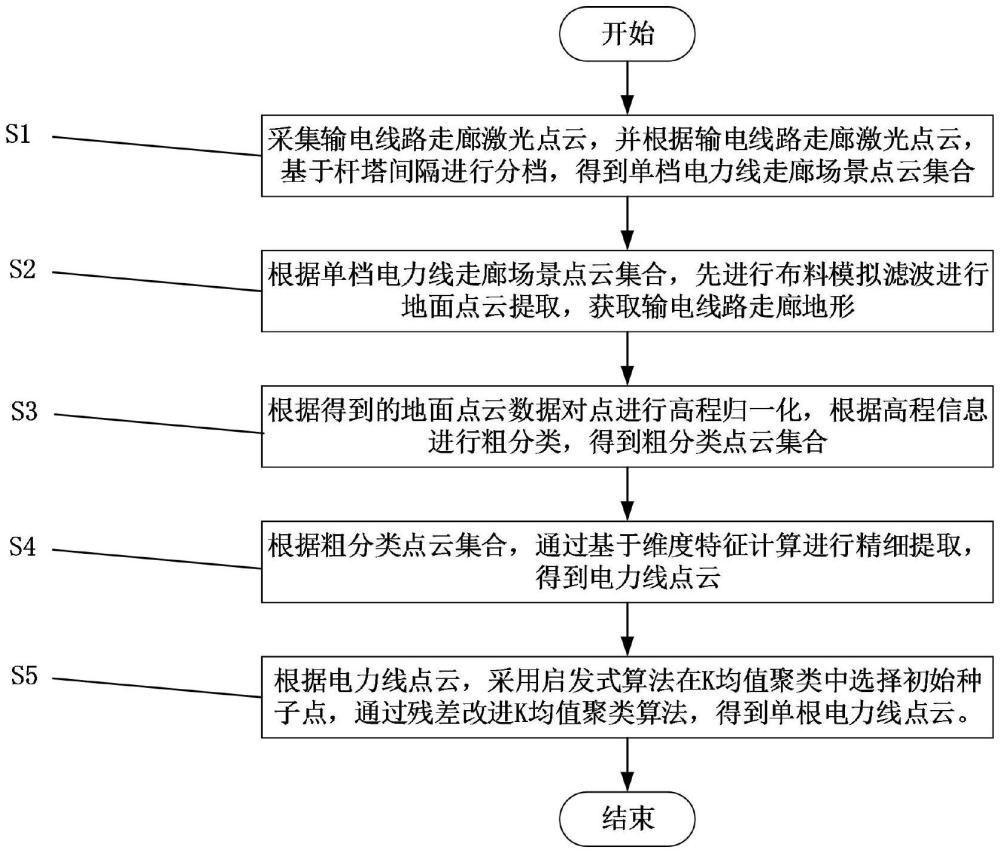
4、步骤s1、采集输电线路走廊激光点云,并根据输电线路走廊激光点云,基于杆塔间隔进行分档,得到单档电力线走廊场景点云集合;
5、步骤s2、根据单档电力线走廊场景点云集合,先进行布料模拟滤波进行地面点云提取,获取输电线路走廊地形;
6、步骤s3、根据得到的地面点云数据对点进行高程归一化,根据高程信息进行粗分类,得到粗分类点云集合;
7、步骤s4、根据粗分类点云集合,通过基于维度特征计算进行精细提取,得到电力线点云;
8、步骤s5、根据得到的电力线点云,采用启发式算法在k均值聚类中选择初始种子点,通过残差改进k均值聚类算法,得到单根电力线点云。
9、本发明的有益效果为:本发明先通过高度阈值计算进行粗分类,排除大部分非电力线点云,然后针对杆塔点和电力线点的维度特征信息的特点进行分离,最后根据残差改进k均值聚类算法,得到单根电力线点云。该方法能在复杂地形下实现电力线的提取,提取过程阈值设置简单,极大提高了电力线点云提取的自动化程度。
10、进一步地,所述步骤s3具体为:
11、s301、根据得到的地面点云数据对点进行高程归一化;
12、s302、计算非地面点的标准差s(z):
13、
14、其中,s(z)表示z标准差;zi和分别表示各点的高程和点云的平均高程值;n是点数;
15、s303、高程大于z标准差的点被归类为电力线候选点,得到粗分类点云集合。
16、上述进一步方案的有益效果为:对单档电力线走廊场景点云集合进行粗分类,首先提出大概率不是电力线点云的数据,能够减小后续的计算复杂度。
17、进一步地,所述步骤s4具体为:
18、s401、根据粗分类点云集合,构建kdtree数据结构,对于点云中的每个点,使用kdtree搜索给定半径内的近邻点,用于高效地搜索每个点的近邻点;
19、s402、对每个点的近邻点集合进行主成分分析(pca),以确定点云在局部空间的主要变化方向,根据pca通过构建领域协方差矩阵计算得到特征值(λ1,λ2,λ3);
20、s403、电力线的一维线性特征极为明显,当λ1>>λ2≈λ3,点云的局部特征为一维线性,计算线性特征概率
21、s404、若l接近1,表示点云在该局部区域近似为线性;若l值越小,表示点云在该局部区域不是线性的;
22、s404、根据当前点云得到的线性特征概率,判断是否大于预设的分割阈值,若是,则判断当前点云为电力线点云,保留当前点云,并进入步骤s405,否则,判断当前点云为杆塔点云,从粗分类点云集合中剔除当前点云,并进入步骤s405;
23、s405、判断是否完成粗分类点云集合所有点云的分类,若是,得到电力线点云集合,完成电力线点云提取,否则,返回步骤s402进入下一点云的分类。
24、上述进一步方案的有益效果为:针对杆塔点和电力线点的维度特征不同的特点进行分离,该方法能在复杂地形下实现电力线的提取,提取过程阈值设置简单,极大提高了电力线点云提取的自动化程度。
25、进一步地,所述步骤s5具体为:
26、s501、首先通过平面拟合算法计算每个点到拟合结果的垂直距离,得到残差向量集合,将所有点的残差向量组成残差矩阵e,其中e∈rn×d,n是点的数量,d是点的维度。
27、s502、计算残差矩阵e的均值向量其中n是点的数量,ei是第i个点的残差向量;然后从残差矩阵e的每个向量中减去均值向量得到中心化后的残差矩阵e′;
28、s503、采用k-means聚类算法的启发式种子点选择方法,选择初始聚类中心,步骤如下:
29、step1:首先需要初始化聚类数目k,最大迭代次数t,以及距离阈值d0;
30、step2:从数据集中随机选取k个数据点,构成初始候选种子点集合c;
31、step3:对于集合c中的每个点pi,计算其与集合中其他所有点pj的欧几里得距离d(pi,pj):
32、
33、其中pi,l和pj,l分别是点pi和pj在第l维的坐标值。
34、step4:对于集合c中的每个点pi,确定其与集合中其他点的最小距离dmin,遍历集合c,选择满足dmin>d0的点pi作为初始种子点;
35、step5:重复step3-step4,找到满足条件的k个种子点作为初始聚类中心;
36、s503、将残差向量作为输入,执行k-means聚类,算法迭代调整聚类中心,将每个点分配到最近的聚类中心,最小化每个簇内的残差平方和其中k表示聚类数目,cj表示第j个聚类中心所对应的簇,ei表示第i个点的残差向量,cj表示第j个聚类中心的坐标向量,||ei-cj||表示欧氏距离;
37、s504、输出聚类结果,得到单根电力线点云。
38、上述进一步方案的有益效果为:采用启发式方法初始化聚类中心,利用残差向量作为聚类的特征输入,与传统的基于原始数据特征的方法相比,更能反映数据点在特定变换下的特性和结构,提高了聚类的准确性和算法的鲁棒性。
39、另一方面,本发明还提供了一种基于机载激光雷达的电力线点云提取装置,包括:
40、点云获取组件,用于获取原始点云数据,所述初始原始点云数据包含电力线和非电力线部分;
41、高程分割组件,用于根据原始点云数据,对单档电力线走廊场景点云集合,先进行布料模拟滤波进行地面点云提取,根据得到的地面点云数据对点进行高程归一化,根据高程信息进行粗分类,得到粗分类点云集合;
42、电力线提取组件,根据粗分类点云集合,通过基于维度特征计算进行精细提取,得到电力线点云;根据得到的电力线点云,采用启发式算法在k均值聚类中选择初始种子点,通过残差改进k均值聚类算法,得到单根电力线点云。
- 还没有人留言评论。精彩留言会获得点赞!