一种基于改进的Deepsort算法的目标车辆追踪方法
本发明属于智能网联车辆感知领域,具体的说是一种基于改进的deepsort算法的目标车辆追踪方法。
背景技术:
1、随着中国汽车保有量的显著增加,对道路交通的效率和安全标准提出了更高的要求。人工智能技术的快速进步为智能网联车辆感知技术领域带来了创新性解决方案。深度学习与计算机视觉技术的结合,为在复杂交通场景中实现车辆的精准识别和追踪提供了新的可能性。自动化技术的应用目标是实现车辆实时定位和异常驾驶行为的监测,这对于智能交通系统的发展至关重要。然而,在一些特定的复杂交通场景中,由于车辆重叠、遮挡、高速移动和环境变化等因素的存在,常常导致追踪目标的失。此外,尽管现有的追踪算法在某些方面显示出了其有效性,但它们在鲁棒性和稳定性方面的表现仍有待提高。具体而言,传统卷积神经网络在车辆特征提取的准确性上存在局限,这导致了在车辆追踪过程中,同一目标车辆的连续追踪能力受限。因此,现有技术在追踪过程中可能无法确保对目标车辆的持续识别和追踪,这在复杂环境下尤为明显。
技术实现思路
1、本发明是为了解决上述现有技术存在的不足之处,提出一种基于改进的deepsort算法的目标车辆追踪方法,以期能够提高复杂交通场景下车辆追踪追踪精度和鲁棒性,从而能提高交通出行的效率和安全性。
2、本发明为达到上述发明目的,采用如下技术方案:
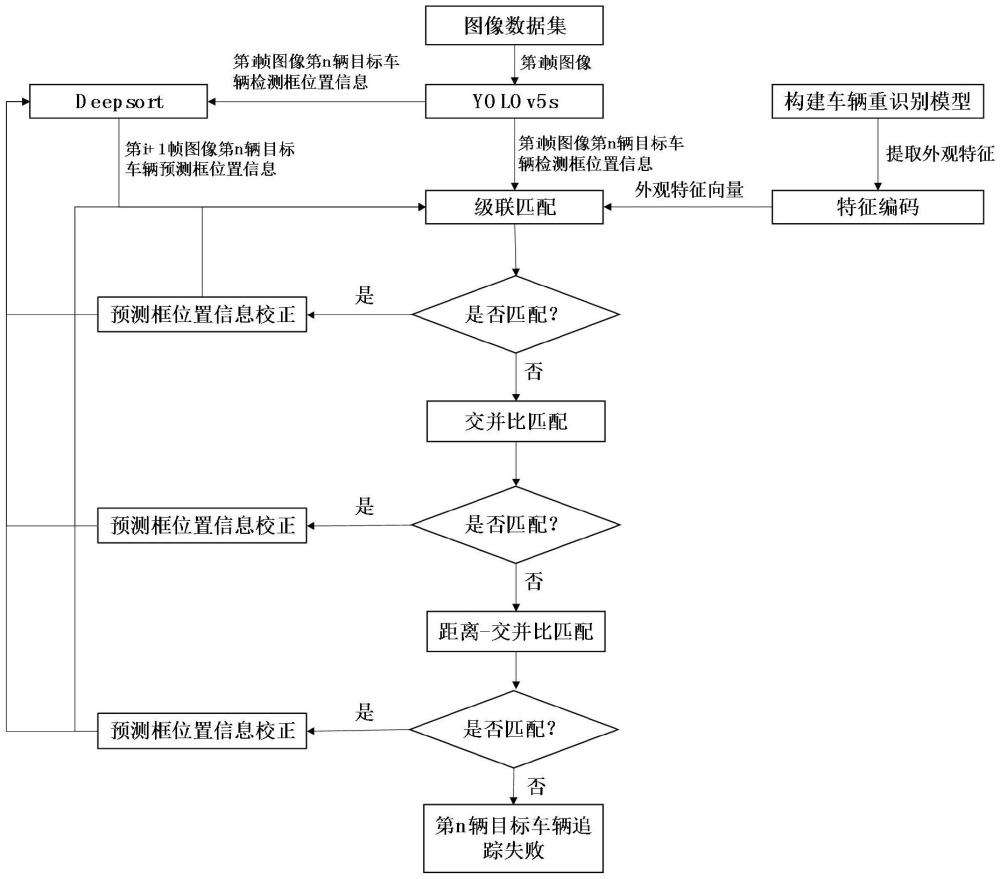
3、本发明一种基于改进的deepsort算法的目标车辆追踪方法的特点在于,是应用于包含网联自动驾驶车辆和传统人工驾驶车辆的道路混合行驶环境中,所述目标车辆追踪方法包括以下步骤;
4、步骤1、图像数据集的构建:
5、步骤1.1、利用摄像头采集高速公路交织区在日间场景下待追踪的目标车辆的视频数据并进行抽帧处理,得到视频图像序列集其中,imagei表示第i帧视频图像,i表示视频图像的总帧数;
6、步骤1.2、采用labelimg标注工具分别对视频图像序列集f中目标车辆的位置和类别进行标注,得到包含标注信息的图像数据集img,记为其中,表示第i帧图像imagei中第n辆目标车辆的标注位置信息,且分别为第i帧图像imagei中第n辆目标车辆所在标注框的宽、高,为第i帧图像imagei中第n辆目标车辆所在标注框的中心点坐标;n表示目标车辆的总数;
7、步骤2、将img输入到yolov5s目标检测模型中对第i帧图像imagei进行目标检测,得到第i帧图像imagei中第n辆目标车辆对应的检测框位置信息其中,表示第i帧图像imagei中第n辆目标车辆的检测框的宽、高、表示第i帧图像imagei中第n辆目标车辆的检测框的中心点坐标,记为
8、步骤3、将输入deepsort目标追踪模型中进行预测,得到第i+1帧图像imagei+1中的第n辆目标车辆的预测框位置信息其中,分别表示第i+1帧图像imagei+1中的第n辆目标车辆的预测框的宽、高,表示第i+1帧图像imagei+1中的第n辆目标车辆的预测框的中心点坐标,记为
9、步骤4、构建车辆重识别模型,包括:残差网络和通道注意力模块,并对第i帧图像imagei中第n辆目标车辆进行特征提取以及特征编码后,得到第n辆目标车辆的外观特征其中,表示第i帧图像imagei中第n辆目标车辆的颜色特征,表示第i帧图像imagei中第n辆目标车辆的纹理特征,表示第i帧图像imagei中第n辆目标车辆的形状特征;
10、步骤5、对第i帧图像imagei中的第n辆目标车辆的检测框以及第i+1帧图像imagei+1的预测框进行级联匹配,若匹配成功,则执行步骤8,否则,执行步骤6;
11、步骤6、对第i帧图像imagei中的第n辆目标车辆的检测框以及第i+1帧图像imagei+1中第n辆目标车辆的预测框进行交并比匹配,若匹配成功,则执行步骤8,否则,执行步骤7;
12、步骤7、对第i帧图像imagei中的第n辆目标车辆的检测框以及第i+1帧图像imagei+1中第n辆目标车辆的预测框进行进行距离-交并比匹配,若匹配成功,则执行步骤8,否则,表示第n辆目标车辆丢失,追踪失败,并返回步骤2对其他目标车辆进行追踪;
13、步骤8、将i+1赋值给i后,返回步骤3顺序执行,直到i>i或追踪失败为止。
14、本发明所述的一种基于改进的deepsort算法的目标车辆追踪方法的特点也在于,所述步骤5包括:
15、步骤5.1、利用式(1)计算第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间的欧式距离
16、
17、步骤5.2、利用式(2)计计算第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间的余弦距离
18、
19、式(2)中,表示第i+1帧图像imagei+1中所有目标车辆的外观特征集合ri+1中第k个特征向量;k∈n;
20、步骤5.3、利用式(3)得到计算第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间的匹配相似度
21、
22、式(3)中,λ表示权重因子,0<λ<1;
23、步骤5.4、若则第i帧图像imagei中的第n辆目标车辆的检测框以及第i+1帧图像imagei+1中第n辆目标车辆的预测框之间匹配成功,并对第i+1帧图像中imagei+1中第n辆目标车辆的预测框位置信息进行校正,得到第i+1帧图像中imagei+1中第n辆目标车辆的检测框位置信息然后执行步骤8;其中,表示第i+1帧图像中imagei+1中第n辆目标车辆的检测框的宽、高、表示第i+1帧图像中imagei+1中第n辆目标车辆的检测框的中心点坐标,并记为
24、若则表示匹配失败,转入步骤6;其中,thα为设定的级联匹配阈值。
25、所述步骤6包括:
26、步骤6.1、利用式(4)计算第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间的交并比损失
27、
28、式(4)中,表示第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框相交部分的面积,表示第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间总覆盖面积;
29、步骤6.2、若则表示匹配成功,并对第i+1帧图像中imagei+1中第n辆目标车辆的预测框位置信息进行校正,得到第i+1帧图像中imagei+1中第n辆目标车辆的检测框位置信息并执行步骤8;
30、若则匹配失败,转入步骤7;其中,thβ为设定的交并比匹配阈值。
31、所述步骤7包括:
32、步骤7.1、利用式(5)计算第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间的距离-交并比损失
33、
34、式(5)中,表示第i帧图像imagei中第n辆目标车辆的检测框与第i+1帧图像imagei+1中第n辆目标车辆的预测框之间最小封闭区域的对角线距离;
35、步骤7.2、若则表示匹配成功,并对第i+1帧图像中imagei+1中第n辆目标车辆的预测框位置信息进行校正,得到第i+1帧图像中imagei+1中第n辆目标车辆的检测框位置信息并执行步骤8;
36、则表示匹配失败,第n辆目标车辆丢失,其中,thγ表示设定的距离-交并比匹配阈值。
37、本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述目标车辆追踪方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
38、本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序的特点在于,所述计算机程序被处理器运行时执行所述目标车辆追踪方法的步骤。
39、与现有技术相比,本发明的有益效果在于:
40、1本发明构建了一种新的的车辆重识别的模型,该模型将特征提取效果更佳的残差网络作为特征提取器,这种网络结构更深层次,特征提取能力更强,能更有效地捕捉目标车辆的外观特征信息。同时,引入通道注意力机制使网络能够更加聚焦于目标区域,提升了目标车辆追踪的精确性和鲁棒性;
41、2、本发明通过对deepsort算法的匹配阶段进行重新构建,通过在目标车辆的检测框与预测框的关联匹配过程中添加距离-交并比匹配,这能有效应对复杂交通环境下由于车辆遮挡、重叠等因素导致的追踪目标丢失的问题。
- 还没有人留言评论。精彩留言会获得点赞!