一种测绘用定位方法、装置及系统与流程
本发明涉及定位,具体涉及一种测绘用定位方法、装置及系统。
背景技术:
1、测绘,即测量与绘图,是指利用一定的仪器和方法,对地面或空间的各种目标进行观测和测量,并将所得数据用图形或数字的形式表示出来的技术和科学,测绘工作包括地形测量、地籍测量、工程测量等领域。测绘技术的发展不仅依赖于传统的测量仪器和方法,还不断结合现代科技,如无人机和遥感技术等,使得测绘工作更加精确和高效。
2、在使用无人机进行测绘过程中,可能需要无人机跨越较为广阔的区域进行测绘,在这种情况下,可能会出现无人机赶往下一个位置时,能源不足的情况。现有技术中,大多会采用设置中转站对无人机进行充电或者增加无人机数量的方式,来解决这种问题。然而,这两种方法均会提高测绘的成本,具体地,在较为广阔的区域内进行测绘时,无人机所需中转站的数量会较多,进而增加了测绘的成本;无人机的造价一般较为昂贵,使用更多的无人机,会提高测绘的成本。
技术实现思路
1、本发明的目的在于提供一种测绘用定位方法、装置及系统,解决以下技术问题。
2、本发明的目的可以通过以下技术方案实现:
3、一种测绘用定位方法,包括以下步骤:
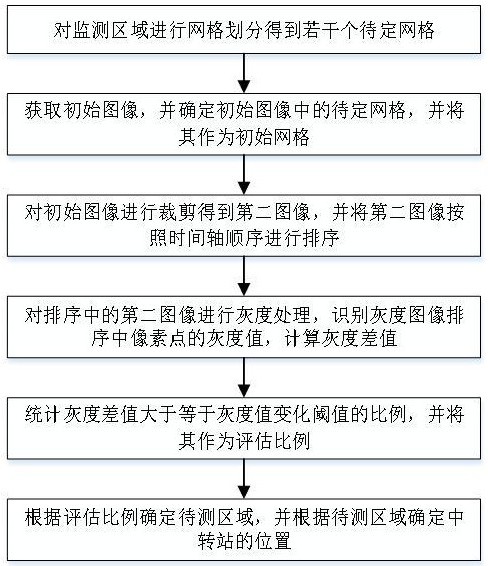
4、s1:设定监测区域,对所述的监测区域进行网格划分得到若干个待定网格,所述的待定网格的长度和宽度均为μ*l,μ表示预设的比例系数,l表示在预设的高度下,无人机搭载的测绘装置的测绘宽度;
5、s2:获取过去m次测绘时拍摄的所述的监测区域的图像,并将其作为初始图像,m为预设次数,并确定所述的初始图像中的待定网格,并将其作为初始网格;
6、对所述的初始图像进行裁剪得到初始网格的图像,并将其作为第二图像,并将同一初始网格对应的第二图像按照时间轴顺序进行排序;
7、对排序中的第二图像进行灰度处理得到灰度图像排序,识别所述的灰度图像排序中像素点的灰度值i(xi,yi),其中(xi,yi)表示像素点在第i张灰度图像的坐标,i为正整数且i≤m-1,计算相邻两张灰度图像间同一像素点的灰度差值δii=|i(xi,yi)-i(xi+1,yi+1)|;
8、统计所述的灰度差值δi≥δi'的像素点的比例di,∆i'表示预设的灰度值变化阈值,并将其作为评估比例;
9、s3:根据所述的评估比例确定待测区域,所述的待测区域为需要进行测绘的待定网格,并根据所述的待测区域确定中转站的位置。
10、作为本发明进一步的方案:所述的步骤s2中,确定所述的初始图像中的待定网格的过程具体包括:
11、获取所述的测绘装置的内参矩阵和外参矩阵,并将所述的待定网格的顶点在坐标系中坐标记为顶点坐标;
12、以所述的监测区域的中心点为原点建立坐标系,作为第一坐标系,并以所述的测绘装置的光心为原点建立坐标系,作为第二坐标系;
13、通过所述的外参矩阵将所述的顶点坐标从第一坐标系转换到第二坐标系,并根据内参矩阵将第二坐标系内的顶点坐标转换为像素坐标,并根据所述的像素坐标确定图像中的待定网格。
14、作为本发明进一步的方案:统计所述的灰度差值∆i≥∆i'的像素点的比例的过程中,还包括以下步骤:
15、计算所述的灰度差值的均值iave,当存在灰度差值d与所述的均值iave间的差值大于等于预设的差值阈值时,去除所述的灰度差值d,并重新统计所述的灰度差值δi≥δi'的像素点的比例。
16、作为本发明进一步的方案:根据所述的评估比例确定待测区域的过程具体包括:
17、将拍摄第一张初始图像的时间记为时间起点0,并生成对应的数据点(tb,db),tb表示拍摄第b张初始图像的时间与拍摄第一张初始图像间的时间间隔;
18、将所述的数据点中评估比例小于等于预设的比例阈值的数据点作为标准点,并判断相邻两标准点间是否存在其余数据点,若是,则不再将前一个标准点作为标准点;若否,则获取相邻两标准点间的时间间隔,作为标准时间;
19、通过直线连接相邻的数据点,得到评估比例折线图,获取所述的评估比例折线图的函数关系式f(t);
20、计算评估量,tc表示第c个标准时间,c'表示所述的标准时间的总数;
21、当所述的评估量d'≥dtot'时,将对应的待定网格作为待测区域。
22、作为本发明进一步的方案:将当前测绘过程中未作为待测区域的待定网格,作为下一次测绘过程中的待测区域。
23、作为本发明进一步的方案:所述的步骤s3中,根据所述的待测区域确定中转站的位置的过程具体包括:
24、将所述的待测区域的中心点作为采集点,以采集点j为起点,通过遗传算法确定最优路线,所述的最优路线为经过所有采集点且路程最短的路线;
25、从所述的采集点j开始,在所述的最优路线上以0.8g为路程间隔设置路程点,g表示无人机的最大续航路程,并在每个路程点对应的位置上设置中转站。
26、一种测绘用定位系统,包括:
27、网格化模块:设定监测区域,对所述的监测区域进行网格划分得到若干个待定网格,所述的待定网格的长度和宽度均为μ*l,μ表示预设的比例系数,l表示在预设的高度下,无人机搭载的测绘装置的测绘宽度;
28、图像处理模块:获取过去m次测绘时拍摄的所述的监测区域的图像,并将其作为初始图像,m为预设次数,并确定所述的初始图像中的待定网格,并将其作为初始网格;
29、对所述的初始图像进行裁剪得到初始网格的图像,并将其作为第二图像,并将同一初始网格对应的第二图像按照时间轴顺序进行排序;
30、对排序中的第二图像进行灰度处理得到灰度图像排序,识别所述的灰度图像排序中像素点的灰度值i(xi,yi),其中(xi,yi)表示像素点在第i张灰度图像的坐标,i为正整数且i≤m-1,计算相邻两张灰度图像间同一像素点的灰度差值δii=|i(xi,yi)-i(xi+1,yi+1)|;
31、统计所述的灰度差值δi≥δi'的像素点的比例di,∆i'表示预设的灰度值变化阈值,并将其作为评估比例;
32、位置确定模块:根据所述的评估比例确定待测区域,所述的待测区域为需要进行测绘的待定网格,并根据所述的待测区域确定中转站的位置。
33、一种测绘用定位装置,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述的一种测绘用定位方法的步骤。
34、本发明的有益效果:在本发明中,首先确定监测区域,为了方便后续处理,监测区域为需要进行测绘的区域的最小外接矩形,并对监测区域进行网格划分,这是后续处理的基础;需要说明的是,测绘装置即相机,根据测绘宽度确定待定网格的宽度和长度可以防止由于网格区域较大,需要在网格区域内多次拍摄的情况,从而简化问题,μ表示预设的比例系数,可以由专家设定,或根据实验和历史数据标定;之后确定初始网格;需要说明的是,通过相机的内参矩阵和外参矩阵进行坐标变换,可以精确地确定图像中的待定网格即初始网格;相机参数可以分为两类:内部参数(内参)和外部参数(外参),内参是与相机自身特性相关的参数,如相机的焦距、像素大小等,外参则是相机相对于世界坐标系的旋转和平移变换关系,相机的内外参数共同决定了图像的几何畸变、分辨率等关键特性;接着对于同一个初始网格的图像,进行灰度处理并计算灰度差值,并统计灰度差值大于等于预设的灰度值变化阈值比例,这是后续筛选待测区域的基础;需要说明的是,比例越大,说明灰度值出现明显变化的像素点的占比越高,说明初始网格内的区域在相邻两张图像间变化的越大,因此应当保持关注,即作为待测区域;而标准时间越少,则说明灰度差值小于预设的灰度值变化阈值比例的时间越少,即在过去一段时间内大部分的时间上初始网格内的区域在相邻两张图像间的变化的均较大,应当保持关注,即作为待测区域,从而对其进行测绘,以便工作人员进行后续的分析和处理;在确定了待测区域后根据待测区域确定中转站的位置;值得注意的是,筛选待测区域可以减少整体需要测绘的区域,进而减少无人机需要飞行的路程,从而降低所需的中转站的数量;以0.8g作为中转站间的间隔路程,可以避免无人机在飞行过程中能源不足导致的意外情况。本发明可以筛选待测区域,从而降低需要测绘的区域,进而减少中转站的数量,降低测绘的成本。
- 还没有人留言评论。精彩留言会获得点赞!