基于图像处理的三维虚拟仿真方法及系统与流程
本技术涉及图像处理,具体涉及基于图像处理的三维虚拟仿真方法及系统。
背景技术:
1、虚拟现实技术是通过人机交互使人身临其境的技术,能够用于战场指挥、战场模拟对抗训练上。在战场模拟时为了提供真实的作战环境,通常需要实现对目标战场三维虚拟模型建立。
2、在山区等复杂地形三维虚拟模型建立时首先需要建立地面模型,因此需要首先识别出所采集点云数据中的地面点云数据。但由于山地地形起伏复杂加上植被干扰,因此需要地面点云滤波算法对地面点云数据进行识别。常见的地面点云滤波可概括为三类:坡度、形态学和表面滤波方法。表面滤波方法中布料点云滤波模拟在复杂山区的地面点云滤波中表现良好,但是高精度的布料点云滤波计算量大,数据处理时间长;而在低精度时该算法在一些地面陡峭位置会出现布料对地面点云不贴合以及没有充分利用点云数据中的颜色、几何信息,导致地面点云无法识别,进而使地面三维模型的仿真效果较差。
技术实现思路
1、为了解决未充分考虑点云信息以及点云不贴合造成的仿真效果差的技术问题,本技术提供了基于图像处理的三维虚拟仿真方法及系统,所采用的技术方案具体如下:
2、第一方面,本技术提出了基于图像处理的三维虚拟仿真方法,该方法包括以下步骤:
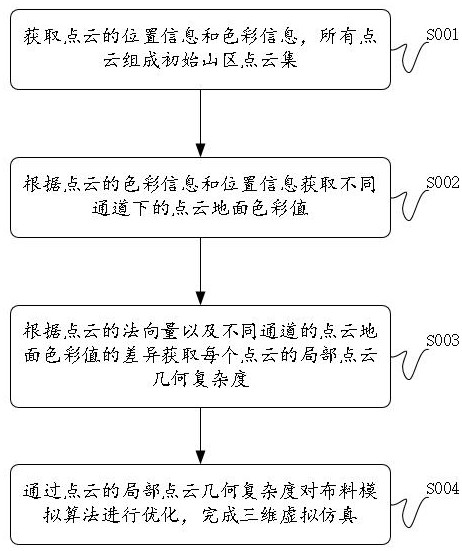
3、获取点云的位置信息和色彩信息,所有点云组成初始山区点云集;
4、根据点云的色彩信息和位置信息分别获取点云的灰度强度值和参考高度;根据所有点云的灰度强度值和参考高度获取点云的亮度补偿系数;根据所有点云的亮度补偿系数和色彩信息获取不同通道的点云地面色彩值;
5、获取每个点云的法向量,根据点云的法向量以及不同通道的点云地面色彩值的差异获取每个点云的局部点云几何复杂度;
6、通过点云的局部点云几何复杂度对布料模拟算法进行优化,使用优化后的布料模拟算法对初始山区点云集处理完成三维虚拟仿真。
7、在上述方案中,针对传统布料滤波算法未考虑点云色彩的问题,先对点云集进行区域分割,对每个区域计算出亮度补偿系数,消除了山区光照不均匀分布带来的色彩差异影响,进一步以参考高度为权重,结合亮度补偿系数计算出点云地面色彩值,表征出点云数据的整体色彩差异。结合点云色彩值计算第二色彩差异,并结合第一色彩差异和距离差异,得到不同尺度下的尺度向量,进而得到局部点云几何复杂度,由于以色彩差异为权重,因此局部点云几何复杂度表征的是地面曲面的方向变化情况,能够识别出局部地面不平整的区域。通过后处理机制中实际点的局部角度情况,计算出形状可靠度,结合局部点云几何复杂度得到后处理阈值几何权重,动态调整不同位置的后处理阈值,对于地面形状正常、地面沟壑复杂的位置采用更高的后处理阈值,避免对植物多的区域采用高后处理阈值,能够更准确的识别出地面点云,结合了地形以及点云的色彩信息和位置信息,提高地面三维模型的仿真效果。
8、在一个实施例中,所述根据点云的色彩信息和位置信息分别获取点云的灰度强度值和参考高度的方法为:
9、点云的色彩信息包括在rgb空间三个通道的色彩强度值;将三个通道的色彩强度值进行灰度化获取点云的灰度强度值;
10、点云的位置信息包括x轴、y轴、z轴对应的x值、y值和z值,以xy平面为基准平面,将基准平面分为若干大小的正方形,正方形结合z值后得到一个长方体;
11、对于每个长方体,在长方体中选取z值最小的点云记为地面参考点云,将长方体内的每个点云与地面参考点云的z值的差异作为每个点云的参考高度。
12、在一个实施例中,所述根据所有点云的灰度强度值和参考高度获取点云亮度补偿系数的方法为:
13、将长方体内任意一个点云记为目标点云,将目标点云与长方体内其余点云的灰度强度值的差值绝对值作为目标点云与其余点云的亮度差异;将目标点云与长方体内其余点云的参考高度的差值绝对值归一化后作为目标点云与其余点云的高度权重;
14、令目标点云与其余点云的亮度差异和高度权重的乘积作为目标点云与其余点云的亮度补充,根据目标点云与其余所有点云的亮度补充获取目标点云的亮度指数,将所有目标点云的亮度指数的均值作为长方体内所有点云的亮度补偿系数。
15、在上述方案中,对每个区域计算出亮度补偿系数,消除了山区光照不均匀分布带来的色彩差异影响。
16、在一个实施例中,所述根据所有点云的亮度补偿系数和色彩信息获取不同通道的点云地面色彩值的方法为:
17、在初始山区点云集中,在每个通道下,基于位置信息获取每个点云的参考高度,基于色彩信息获取每个点云的颜色强度值;根据参考高度、颜色强度值和亮度补偿系数获取点云地面色彩值;每个通道的点云地面色彩值与参考高度呈负相关关系,每个通道的点云地面色彩值分别与所有点云的亮度补偿系数、通道的色彩强度值呈正相关关系。
18、在一个实施例中,所述获取目标分量,根据点云的法向量以及不同通道的点云地面色彩值的差异获取每个点云的局部点云几何复杂度的方法为:
19、在初始山区点云集中,将任意一个点云记为中心点云,对于每个中心点云,选取第一预设数量个离中心点云最近的点云,记为第一距离点云,将中心点云和所有第一距离点云构成的集合记为小尺度点云集;
20、对于每个中心点云,选取第二预设数量个离中心点云最近的点云,记为第二距离点云,将中心点云和所有第二距离点云构成的集合记为大尺度点云集;
21、对于两个点云集中任意一个点云集记为目标点云集,对于目标点云集,根据中心点云与每个点云在不同通道下的色彩差异获取每个点云的第一色彩差异;
22、对于目标点云集,根据每个点云在不同通道下与点云地面色彩值的色彩差异获取每个点云的第二色彩差异;
23、在目标点云集中,获取中心点云与每个点云的距离差异,根据每个点云的第一色彩差异、第二色彩差异以及中心点云和每个点云的距离差异获取每个点云的局部点云方向权重;
24、在目标点云集中,根据所有点云的局部点云方向权重和所有点云对应的法向量计算目标点云集的法向量,根据大尺度点云集与小尺度点云集的法向量差异获取中心点云的局部点云几何复杂度。
25、在上述方案中,以色彩差异为权重,局部点云几何复杂度表征的是地面曲面的方向变化情况,能够识别出局部地面不平整的区域。
26、在一个实施例中,所述根据中心点云与每个点云在不同通道下的色彩差异获取每个点云的第一色彩差异的方法为:
27、每个通道下,将中心点云的色彩强度值与每个点云的色彩强度值的差值绝对值作为每个点云的通道色彩差异;根据通道色彩差异获取第一色彩差异;每个点云的第一色彩差异分别与每个点云在不同通道下的通道色彩差异呈正相关关系。
28、在一个实施例中,所述根据每个点云在不同通道下与点云地面色彩值的色彩差异获取每个点云的第二色彩差异的方法为:
29、每个通道下,将每个点云的色彩强度值与每个通道下的点云地面色彩值的差值绝对值作为每个点云的地面色彩差异;根据地面色彩差异获取点云地面色彩值;每个通道下的点云地面色彩值分别与每个点云在不同通道下的地面色彩差异呈正相关关系。
30、在一个实施例中,所述获取中心点云与每个点云的距离差异,根据每个点云的第一色彩差异、第二色彩差异以及中心点云和每个点云的距离差异获取每个点云的局部点云方向权重的方法为:
31、计算每个点云与中心点云的欧氏距离,并将欧氏距离加数字1作为中心点云与每个点云的距离差异;根据第一色彩差异、第二色彩差异和距离差异获取局部点云方向权重;每个点云的局部点云方向权重分别与每个点云的第一色彩差异、第二色彩差异、中心点云与每个点云的距离差异呈正相关关系。
32、在一个实施例中,所述根据所有点云的局部点云方向权重和所有点云对应的法向量计算目标点云集的法向量,根据大尺度点云集于小尺度点云集的法向量差异获取中心点云的局部点云几何复杂度的方法为:
33、以点云的局部点云方向权重为权值,将所有点云的法向量综合计算获取目标点云集的法向量;
34、获取大尺度点云集的法向量和小尺度点云集的法向量,计算大尺度点云集的法向量和小尺度点云集的法向量的差异得到差异向量,将差异向量的模长作为中心点云的局部点云几何复杂度。
35、第二方面,本技术实施例还提供了基于图像处理的三维虚拟仿真系统,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述基于图像处理的三维虚拟仿真方法的步骤。
36、本技术的有益效果为:
37、针对传统布料滤波算法未考虑点云色彩的问题,先对点云集进行区域分割,对每个区域计算出亮度补偿系数,消除了山区光照不均匀分布带来的色彩差异影响,进一步以参考高度为权重,结合亮度补偿系数计算出点云地面色彩值,表征出点云数据的整体色彩差异。结合点云色彩值计算第二色彩差异,并结合第一色彩差异和距离差异,得到不同尺度下的尺度向量,进而得到局部点云几何复杂度,由于以色彩差异为权重,因此局部点云几何复杂度表征的是地面曲面的方向变化情况,能够识别出局部地面不平整的区域。通过后处理机制中实际点的局部角度情况,计算出形状可靠度,结合局部点云几何复杂度得到后处理阈值几何权重,动态调整不同位置的后处理阈值,对于地面形状正常、地面沟壑复杂的位置采用更高的后处理阈值,避免对植物多的区域采用高后处理阈值,能够更准确的识别出地面点云,结合了地形以及点云的色彩信息和位置信息,提高地面三维模型的仿真效果。
- 还没有人留言评论。精彩留言会获得点赞!