一种基于无人机的配电线路缺陷识别预警方法和系统与流程
本发明涉及线路巡检,特别涉及一种基于无人机的配电线路缺陷识别预警方法和系统。
背景技术:
1、人工巡检会根据设备分布位置以及电站设备巡检点,规划电站巡检路线图,不管是简化巡视、全面巡视和特殊巡视,运维人员都需要按照规划的巡视路线图按照顺序完成各项设备的巡视工作。
2、现有技术中,常使用巡检机器人通过在配电线路上沿地线行走进行线路巡检,配电线存在检测盲区,存在不能够检测配电线是否存在缺陷并对缺陷配电线进行全方位图像采集的问题。
3、例如,公告号为cn107706871a,名称为架空配电线路的中国发明专利,该专利在耐张杆的同一水平面上固定有两个复合横担,能够满足耐张需要的纵向张力,进一步地,利用复合横担本体的复合化,能够大大增加干弧距离,提高电气耐雷水平,避免雷击断线闪络等事故,复合横担具有免维护性,无需定期检测和维护,大大降低人力成本,复合横担的使用还可以省略耐张绝缘子,简化线路结构,但是存在不能够检测配电线是否存在缺陷并对缺陷配电线进行全方位图像采集的问题。
技术实现思路
1、针对现有技术不能够检测配电线是否存在缺陷并对缺陷配电线进行全方位图像采集的不足,本发明提出了一种基于无人机的配电线路缺陷识别预警方法和系统,能够检测配电线是否存在缺陷并对缺陷配电线进行全方位图像采集。
2、以下是本发明的技术方案,一种基于无人机的配电线路缺陷识别预警方法,无人机与第二系统连接,无人机包括处理模块,识别模块和通讯模块,第二系统包括显示模块和预警模块,方法包括以下步骤:
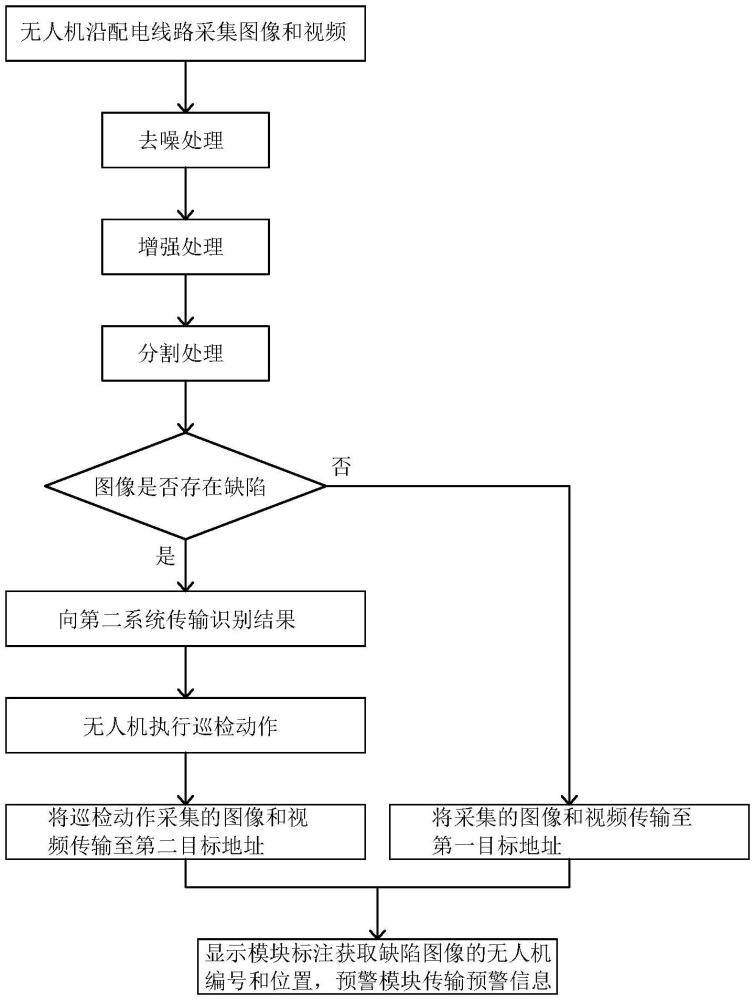
3、s1:无人机沿配电线路采集图像和视频;
4、s2:处理模块对图像进行处理,将处理后的图像传输至识别模块;
5、s3:识别模块采用深度学习识别模型判断图像是否存在缺陷,若是,通讯模块向第二系统传输识别结果,无人机执行巡检动作,通讯模块将巡检动作采集的图像和视频传输至第二系统的第二目标地址;若否,通讯模块将采集的图像和视频传输至第二系统的第一目标地址;
6、s4:显示模块标注获取缺陷图像的无人机编号和位置,预警模块传输预警信息。
7、本方案中,无人机沿配电线路采集图像,处理模块对图像进行处理,将处理后的图像传输至识别模块,识别模块采用深度学习识别模型判断图像是否存在缺陷,能够检测配电线路是否存在缺陷,提高检测的精度。若存在缺陷,无人机执行巡检动作,通讯模块将巡检动作采集的图像和视频传输至第二目标地址,通过巡检动作全方位采集图像和视频,通过更换图像和视频的存储地址对缺陷图像和视频进行分类,便于查阅缺陷图像和视频;若不存在缺陷,通讯模块将采集的图像和视频传输至第一目标地址。显示模块标注获取缺陷图像的无人机编号和位置,预警模块传输预警信息,能够及时提醒运维人员配电线路存在缺陷。
8、作为优选,s1 中,根据无人机信息匹配无人机孪生模型,根据配电线路信息匹配配电线路孪生模型,根据无人机的实时位置信息更新无人机孪生模型在配电线路孪生模型中的位置。
9、本方案中,采用数字孪生技术,根据配电线路信息匹配配电线路孪生模型,将配电线路设为背景,根据无人机信息匹配无人机孪生模型,根据无人机的实时位置信息更新无人机孪生模型在配电线路孪生模型中的位置,能够直观查看无人机和配电线路的相对位置关系。
10、作为优选,s2 中,处理模块对图像进行去噪处理、增强处理和分割处理。
11、本方案中,在深度学习前对图像进行预处理,提高深度学习的准确性。
12、作为优选,去噪处理包括以下步骤:选定指定大小的滑窗,滑窗在图像上逐个像素移动,滑窗排序对应像素的灰度值大小并找出中间值,将中间值作为滑窗所在像素的灰度值;
13、增强处理包括以下步骤:用拉普拉斯算子对原图像处理产生灰度突变图像,将灰度突变图像和原始图像叠产生锐化图像,对锐化图像进行线性变换处理得到增强图像;
14、分割处理包括以下步骤:自适应算法计算图像中每个像素的阈值,利用得到的阈值矩阵实现二值化。
15、本方案中,在深度学习前对图像进行去噪处理、增强处理和分割处理,提高深度学习的准确性。
16、作为优选,s3 中,无人机执行巡检动作,包括以下步骤:
17、s31:无人机采用第一垂直距离巡检配电线路;
18、s32:图像存在缺陷时,无人机在第一垂直距离与输电线呈第一夹角环绕若干周采集图像和视频;
19、s33:无人机升降至第二垂直距离,在第二垂直距离与输电线呈第二夹角环绕若干周采集图像和视频;
20、s34:无人机升降至第一垂直距离沿配电线进行巡检。
21、本方案中,采用不同高度和角度对配电线目标检测点进行全方位图像采集,能够直观查阅配电线的缺陷。
22、作为优选,第一夹角呈30°至60°的夹角,第一夹角和第二夹角互余,第二垂直高度大于第一垂直高度。
23、本方案中,采用不同高度和角度对配电线目标检测点进行全方位图像采集,能够直观查阅配电线的缺陷。
24、作为优选,对不同状态的无人机进行不同的渲染:绿色无人机孪生模型对应无人机正在巡检且未执行巡检动作;红色无人机孪生模型对应无人机正在巡检且正在执行巡检动作;橙色无人机孪生模型对应无人机正在巡检且执行过巡检动作;灰色无人机孪生模型对应无人机未巡检。
25、本方案中,在显示模块中,根据无人机是否巡检和是否发现配电线缺陷对无人机孪生模型进行分类,便于直观查看所有无人机孪生模型的任务情况。
26、一种基于无人机的配电线路缺陷识别预警系统,包括:无人机、第一系统和第二系统,第二系统连接无人机和第一系统。
27、本方案中,能够检测配电线是否存在缺陷,并对缺陷配电线进行全方位图像采集。
28、作为优选,无人机包括,
29、主控模块,用于控制行驶模块、供能模块、位置模块、灯光模块、对讲模块和通讯模块;
30、供能模块,用于为无人机供电能;
31、行驶模块,用于控制无人机的飞行方向、飞行高度和飞行轨迹;
32、位置模块,用于定位无人机实时位置信息;
33、灯光模块,用于为无人机提供照明;
34、对讲模块,用于实时通话;
35、照相模块,用于采集配电线路图像;
36、录像模块,用于采集配电线路视频;
37、处理模块,用于处理照相模块采集的图像;
38、识别模块,用于对比处理模块处理后的图像和标准图像,进行配电线路缺陷判断;
39、通讯模块,用于将照相模块采集的图像传输至处理模块,将识别模块的识别结果传输至第二系统,将照相模块采集的图像和录像模块采集的视频传输至第二系统。
40、本方案中,能够检测配电线是否存在缺陷,并对缺陷配电线进行全方位图像采集。
41、作为优选,第一系统包括充电模块,换点模块和检测模块,检测模块与换电模块信号连接,换电模块和充电模块信号连接。本方案中,第一系统设有检测模块、充电模块和换电模块,检测模块与换电模块信号连接,换电模块和充电模块信号连接。检测模块通过传感器检测无人机是否停靠到位,换电模块用于取出目标无人机的供能模块,将供能模块放入充电模块进行充电并且取出另一个充电完成的供能模块放入无人机。便于无人机自动换电。
42、第二系统包括设置模块,渲染模块,显示模块和预警模块,设置模块与渲染模块连接,渲染模块与显示模块连接。其中设置模块用于设置巡检线路和采集轨迹。根据配电线路设置无人机的巡检路线,每个无人机 巡检特定的配电线路,每条配电线路指定若干架无人机 进行巡检。设置模块通过第二系统的通讯模块与无人机无线相连,将巡检线路和采集轨迹发送给主控模块,由主控模块根据巡检线路和采集轨迹控制行驶模块按照巡检线路和采集轨迹进行飞行。设置模块对根据无人机型号进行无人机信息设置,以及对配电线路信息进行设置,设置模块将无人机信息以及配电线路信息发送给渲染模块。渲染模块,可以是云渲染服务器,用于根据无人机信息匹配无人机孪生模型,根据配电线路信息匹配配电线路孪生模型,根据无人机的位置模块传输的无人机的位置信息更新无人机孪生模型在配电线路孪生模型中的位置。显示模块用于展示无人机孪生模型、配电线路孪生模型和视频。显示模块通过第二系统的通讯模块与无人机相连,接收无人机传输过来的图像和视频。
43、本发明的有益效果是:通过采用无人机检测配电线是否存在缺陷,并对缺陷配电线进行全方位图像采集,能实时获取缺陷位置,并及时进行预警,及时提醒运维人员配电线路存在缺陷。
- 还没有人留言评论。精彩留言会获得点赞!