一种隧道三维自动化变形监测方法及系统与流程
本发明涉及监测管理系统,特别涉及一种隧道三维自动化变形监测方法及系统。
背景技术:
1、为了克服地形障碍,山岭地区使用隧道可以改善线路设计,提高行车速度、缩短行驶里程、减少对植被的破环,并有助于保护生态环境。
2、隧道由于其特殊性,长期受到地质变化、水文条件、地震等多个因素的影响,隧道结构的变形是难以避免的;隧道的变形可能表现为地表下沉、结构开裂、开裂变形等,一旦发生,可能会对隧道结构安全和运营带来严重的影响,因此隧道变形监测的意义和重要性非常重大,可以保障隧道的安全运营,减少隧道事故风险,通过隧道结构的变形情况的监测,可以及时发现隧道存在的安全隐患并采取相应的预防措施,降低隧道发生事故的风险。
3、目前隧道变形监测的传统方法主要是每隔一段里程在隧道拱部和隧道两侧预埋数个变形监测点,采用全站仪或水准仪测出拱顶监测点的高程变化量作为隧道拱部沉降量,采用全站仪或收敛计测出两个变形监测点之间距离的变化量作为在两个测点连线方向上隧道收敛变形量。
4、三维激光扫描仪能够自动快速获取目标物体表面的高密度点云数据,测量精度达到毫米级,是一种新兴的隧道变形监测方法。利用三维激光扫描技术进行隧道变形监测,要先使用三维激光扫描仪获取目标里程区段隧道内表面的点云,再对点云进行数据处理分析,目前主要有以下两种处理分析方法:
5、一、使用数据处理软件沿隧道纵深方向在指定里程处垂直于隧道中轴线切取一定厚度的点云,将切取的点云投影在上述指定里程处垂直于中轴线的平面上,对得到的投影进行拟合得到投影的轮廓线作为上述指定里程的隧道断面轮廓线,通过对比不同时期的隧道断面轮廓线,计算出隧道断面轮廓线之间的差值,作为上述指定里程处的隧道变形量;
6、二、使用数据处理软件将得到隧道内表面的点云构造成三角网模型,在指定里程处垂直于隧道中轴线切出一个断面,进而可以得到指定里程断面上的三角网模型的轮廓线,通过对比不同时期的三角网模型在同一指定里程断面上的轮廓线计算出轮廓线之间的差值,作为上述指定里程处的隧道变形量;
7、现有专利cn201811529199.1 一种基于网格投影点云处理技术的隧道变形监测分析方法,针对上述问题,提出了将隧道设计表面模型等分成尺寸相同的多边形单元网格作为投影基准面,将隧道设计表面模型等分成尺寸相同的多边形单元网格作为投影基准面,再将单元网格在隧道表面点云模型上投影范围内的点云拟合成一个平面四边形,同一投影范围不同时期的点云拟合得到平面多边形的形心到隧道中轴线上投影中心的距离之差作为在投影位置隧道的变形量,根据上述单元网格对应投影区域点云的变形与其四周相邻的四个单元网格对应区域投影区域点云的变形方向的差异对判断结果进行筛选,根据单元网格对应位置变形量的大小赋予其不同的色彩而得到更加直观的彩色隧道表面设计模型,进而实现对隧道变形监测的整体性分析。
8、但是,其的数据获取还是依靠人工,监测数据的采集位置选取多依赖于人员的经验,由于每次监测都不一定是同一人员,存在个人主观差异较大,无法实现客观准确地监测。
技术实现思路
1、本发明目的之一在于提供了一种隧道三维自动化变形监测方法及系统,对隧道构建模型,然后再构建的模型基础上进行分析,确定监测点位,保证监测点位的布设的合理性,提高监测的准确性。
2、本发明实施例提供的一种隧道三维自动化变形监测方法,包括:
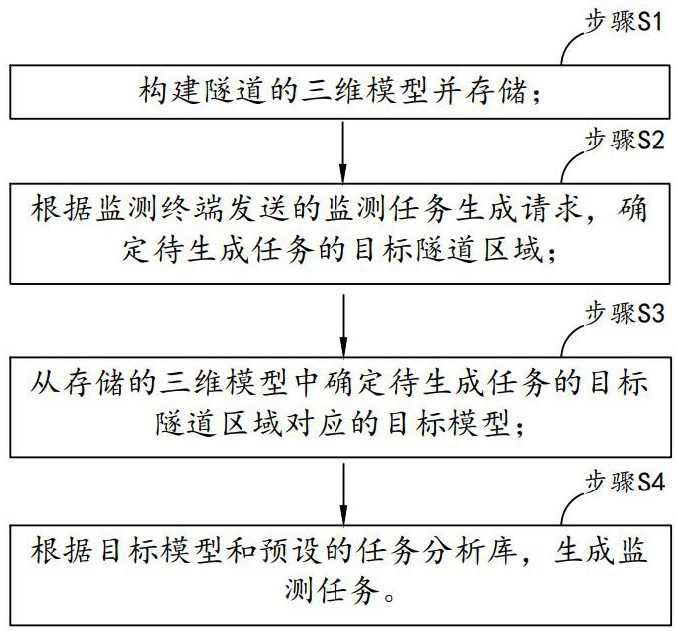
3、构建隧道的三维模型并存储;
4、根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域;
5、从存储的三维模型中确定待生成任务的目标隧道区域对应的目标模型;
6、根据目标模型和预设的任务分析库,生成监测任务。
7、优选的,根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,包括:
8、根据监测任务生成请求中的目标识别编码,查询预设的隧道编码库,确定目标识别编码对应的目标隧道区域。
9、优选的,根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,包括:
10、根据监测任务生成请求中的监测终端的定位信息,确定与定位信息最近的隧道区域为目标隧道区域。
11、优选的,根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,还包括:
12、当与定位信息最近的隧道区域在限制作为生成任务的目标的第一列表中,且未在第一列表中的与定位信息最近的隧道区域的相邻区域为一时,将与定位信息最近的隧道区域的相邻区域作为目标隧道区域;
13、其中,第一列表构建步骤如下:
14、获取距离当前时刻的时间差在预设的时间阈值内的历史监测任务;
15、根据历史监测任务对应的目标隧道区域,构建限制作为生成任务的目标的列表。
16、优选的,根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,还包括:
17、当与定位信息最近的隧道区域在限制作为生成任务的目标的列表中,且未在第一列表中的与定位信息最近的隧道区域的相邻区域不为一时,确定各个相邻区域距离定位信息的最短距离;
18、以最短距离最小的相邻区域作为目标隧道区域。
19、优选的,根据目标模型和预设的任务分析库,生成监测任务,包括:
20、对目标模型进行分割,获取多个模型单元;
21、解析任务分析库,确定重要性评估子库和干扰性评估子库;
22、根据重要性评估子库,确定各个模型单元对应的关键值;
23、根据干扰性评估子库,确定各个模型单元对应的干扰值;
24、根据各个模型单元对应的关键值和干扰值,确定各个模型单元的优先值;
25、根据优先值,构建模型单元筛选列表;
26、基于预设的监测点位筛选规则和模型单元筛选列表,确定监测点位。
27、本发明还提供一种隧道三维自动化变形监测系统,包括:
28、模型构建模块,用于构建隧道的三维模型并存储;
29、目标确定模块,用于根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域;
30、模型调取模块,用于从存储的三维模型中确定待生成任务的目标隧道区域对应的目标模型;
31、任务生成模块,用于根据目标模型和预设的任务分析库,生成监测任务。
32、优选的,目标确定模块根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,执行如下操作:
33、根据监测任务生成请求中的目标识别编码,查询预设的隧道编码库,确定目标识别编码对应的目标隧道区域。
34、优选的,目标确定模块根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,执行如下操作:
35、根据监测任务生成请求中的监测终端的定位信息,确定与定位信息最近的隧道区域为目标隧道区域。
36、优选的,目标确定模块根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,还执行如下操作:
37、当与定位信息最近的隧道区域在限制作为生成任务的目标的第一列表中,且未在第一列表中的与定位信息最近的隧道区域的相邻区域为一时,将与定位信息最近的隧道区域的相邻区域作为目标隧道区域;
38、其中,第一列表构建步骤如下:
39、获取距离当前时刻的时间差在预设的时间阈值内的历史监测任务;
40、根据历史监测任务对应的目标隧道区域,构建限制作为生成任务的目标的列表。
41、优选的,目标确定模块根据监测终端发送的监测任务生成请求,确定待生成任务的目标隧道区域,还执行如下操作:
42、当与定位信息最近的隧道区域在限制作为生成任务的目标的列表中,且未在第一列表中的与定位信息最近的隧道区域的相邻区域不为一时,确定各个相邻区域距离定位信息的最短距离;
43、以最短距离最小的相邻区域作为目标隧道区域。
44、优选的,任务生成模块根据目标模型和预设的任务分析库,生成监测任务,执行如下操作:
45、对目标模型进行分割,获取多个模型单元;
46、解析任务分析库,确定重要性评估子库和干扰性评估子库;
47、根据重要性评估子库,确定各个模型单元对应的关键值;
48、根据干扰性评估子库,确定各个模型单元对应的干扰值;
49、根据各个模型单元对应的关键值和干扰值,确定各个模型单元的优先值;
50、根据优先值,构建模型单元筛选列表;
51、基于预设的监测点位筛选规则和模型单元筛选列表,确定监测点位。
52、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
53、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!