毫米波雷达自适应聚类方法、数据处理设备及存储介质与流程
本发明属于车载毫米波雷达,涉及车载毫米波雷达的数据处理,为一种毫米波雷达自适应聚类方法,数据处理设备及存储介质。
背景技术:
1、毫米波雷达作为高级驾驶辅助系统和无人驾驶的重要传感器之一,在提高交通安全系数、降低交通事故发生率等方面起到重要作用。目标跟踪模块是车载毫米波雷达系统的关键部分之一,是决定雷达性能的重要一环。在实际应用中为了区分目标会先对雷达获取的点云进行聚类,获得点云集合的聚类质心,再基于聚类结果进行后续的目标跟踪。毫米波雷达点云的聚类为目标跟踪奠定了基础,对目标跟踪的性能有着十分显著的作用。
2、传统的聚类方法包括k-means算法和基于密度的噪声应用空间聚类(dbscan)算法。k-means算法需要预知聚类簇个数,无法满足实时性能;dbscan算法是基于密度的方法,由设定的邻域半径和最小点数参数作为密度阈值,如果一个点的邻域半径内至少包含最小点数数目的点,这个点就被视为核心点(core point)。dbscan算法无需预设聚类簇数,并且可以聚类任意形态的目标,且具有去除噪声点的优势,在毫米波雷达领域得到了广泛应用。然而随着毫米波雷达分辨能力提升带来的点云数量的大幅增加,dbscan算法一方面因为要遍历点云而存在效率低的问题,另一方面在目标跟踪情景下,毫米波点云数据存在密度不均匀现象,采用统一的密度阈值会导致较远目标被当成噪声处理,影响后续目标的跟踪。
技术实现思路
1、本发明要解决的技术问题是:在毫米波雷达点云数据处理聚类模块中,随着毫米波雷达精度的提高,点云数量日益增加,现有聚类方法数据处理效率低;同时,毫米波雷达远近目标密度存在不均匀现象,传统聚类算法如dbscan基于统一的密度阈值进行聚类,不能有效应对实际目标跟踪应用中的复杂情况,容易导致远处目标聚类失败或近处多目标被聚类在一起问题,从而影响后续的目标跟踪。
2、本发明的技术方案为:一种毫米波雷达自适应聚类方法,对车载毫米波雷达获取的点云数据进行聚类,以用于后续目标跟踪中的目标区别,所述聚类包括以下步骤:
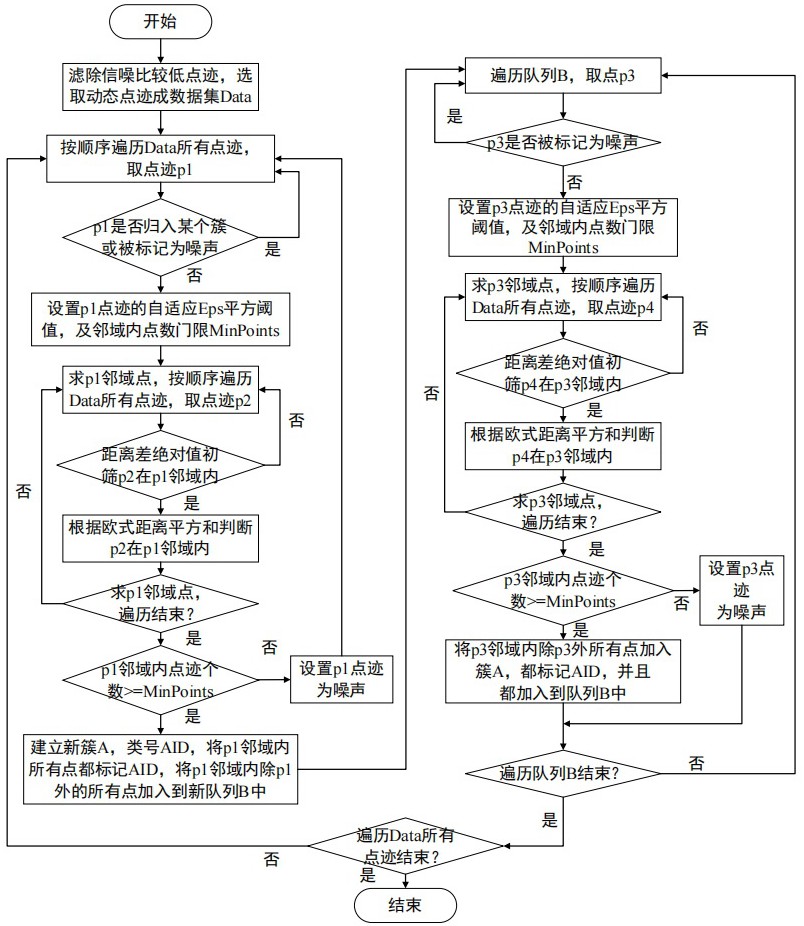
3、1)筛选点云数据,滤除信噪比低于设定阈值的点迹数据,根据点迹速度信息及本车速度信息,选取动态点迹,得到聚类的输入点迹集 data;
4、2)对点迹集 data自适应聚类;
5、2.1)设置自适应的邻域阈值门限eps2及聚类点数门限minpoints,对于点迹p1和p2,设r1和r2分别为点迹p1和p2的径向距离,θ1和θ2分别为点迹p1和p2的方位角,δr和δθ分别表示点迹p1和p2的径向距离差值和方位角度差值,根据两个点迹的欧式距离有:
6、
7、同一个目标的两个点迹间的径向距离差δr与检测的距离分辨rres相关,方位角度差δθ与检测角度分辨率θres相关,令δr= w rrres,δθ= w θθres,其中, w r是δr在rres上的加权值, w θ是δθ在θres上的加权值,则有
8、
9、据此设置邻域阈值门限,即邻域阈值门随点迹间的距离自适应变化,
10、聚类点数门限minpoints根据径向距离分多段进行设置,不同的径向距离区段内具有不同的聚类点数门限;
11、2.2)遍历点迹集 data中的点迹进行初步聚类,根据邻域阈值门限eps2及聚类点数门限minpoints,判断 data中其他点迹是否在当前点迹p1邻域内,并根据径向距离的区段统计邻域内点迹个数是否大于minpoints:
12、满足minpoints条件则p1为核心点,创建新簇a,将p1邻域内的所有点迹归入簇a,同时对应创建新队列b,将点迹p1邻域内的所有点迹加入到队列b中;
13、不满足minpoints条件则点迹p1不是核心点,标记为噪声,获取一下点迹,若该点迹已被标记归入某个簇类或者被标记为噪声,则继续获取下一点迹,直至获取未被作任何标记的点迹,判断是核心点还是噪声;
14、2.3)遍历队列b,若获取点迹有被标记为噪声,则继续获取队列b中下一点,直至获取点迹未被标记为噪声,此时,将获取点迹记作p3,判断点迹p3是否为核心点,若为核心点,则将点迹p3邻域内的所有点迹加入到队列b中,并归入簇a,直至队列b中所有点迹遍历完;
15、3)遍历点迹集 data得到最终聚类结果。
16、进一步的,步骤1)中,动态点迹的选取为:根据点迹去除本车车速度影响的径向速度是否大于设定阈值进行判断,其公式为:
17、
18、其中 radv为点迹径向速度, egov为本车车速, azimuth为点迹方位角, threshold为设定的动态点迹速度阈值,选取满足公式条件的点迹作为聚类输入。
19、进一步的,步骤2.1)中,聚类点数门限minpoints根据径向距离分多段进行设置,对于点迹 p有:
20、
21、其中, range_ i为距离分段的阈值, num i为不同距离下聚类点数门限值, i表示段数标号, r为点迹 p的径向距离。
22、进一步的,步骤2.2)中,先采用点迹间的径向距离差绝对值大于邻域值eps的方法初筛不在点迹p1邻域内的点,即,则认为点迹p2不在点迹p1的邻域内,再对剩下的点迹根据邻域阈值门限eps2判断是否在当前点迹p1邻域内。
23、本发明还提供一种毫米波雷达自适应聚类的数据处理设备,包括数据处理模块,所述数据处理模块中加载有至少一条指令或至少一段程序,所述数据处理模块接收车载毫米波雷达获取的点云数据及车辆运动信息,所述至少一条指令或所述至少一段程序被执行时,对接收的点云数据实现上述的自适应聚类方法,输出点云数据的聚类结果。
24、本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序被执行时,根据车载毫米波雷达获取的点云数据及车辆运动信息,对点云数据实现上述的自适应聚类方法。
25、本发明针对毫米波雷达点云数据的特性提出一种高效自适应聚类方法。首先,筛选点云数据,滤除信噪比较低的点迹数据,根据点迹信息及车辆信息选取动态点迹,作为聚类模块的输入;其次,采用点迹间的径向距离差绝对值大于邻域距离阈值的方法初筛不在邻域内的点,可进一步减少程序的运算量;再次,根据毫米波雷达点云密度不均匀特点,采用基于点迹的距离、距离分辨率及角度分辨率的关系式作为邻域距离阈值进行自适应聚类,改进传统聚类由于采用统一阈值进行聚类导致远处目标不被聚类或者近处目标出现虚假聚类目标情况,从而有效提高聚类效果,实验结果也证明了本发明有效提高了聚类效果,有利于后续的目标跟踪任务。
- 还没有人留言评论。精彩留言会获得点赞!