一种验证GPSS低频振荡阻尼控制效果的方法及系统与流程
本发明涉及电力系统,具体为一种验证gpss低频振荡阻尼控制效果的方法。
背景技术:
1、随着电力系统的发展和对电网稳定性要求的不断提高,低频振荡(lfo)的抑制成为电力系统稳定性研究的重要课题之一,低频振荡是由于系统内部或外部扰动引起的一种周期性电磁振荡现象,常发生在0.1至2.0hz之间,传统的抑制低频振荡的方法主要依赖于电力系统稳定器(pss,也称epss)的应用,pss通过在发电机励磁控制系统中引入附加的阻尼控制信号,能够有效地提高系统的阻尼特性,减弱振荡幅度,然而,随着电网结构的复杂化和大规模新能源并网的增加,单纯依赖pss的抑振效果逐渐显现出局限性,为此,研究人员开始探索在发电机调速系统侧引入附加阻尼控制器(gpss),并通过理论研究和仿真分析论证了其在多机系统中的可行性和优越性,然而,尽管gpss在改善多机系统小扰动和大扰动稳定性方面显示出显著优势,其实际应用仍主要停留在仿真阶段,缺乏大规模的现场试验和应用验证。
2、现有技术在抑制低频振荡方面虽取得了一定进展,但仍存在诸多不足,首先,pss在抑制低频振荡时主要依赖于发电机的励磁系统,其效果在强互联系统中较为显著,但在弱互联系统和高比例新能源系统中效果有限,难以应对复杂电网环境下的振荡问题,其次,现有的gpss研究多集中在理论和仿真层面,缺乏系统化的现场验证方法,使得其实际效果和可靠性难以评估,此外,现有的抑振控制策略往往缺乏对系统整体性能的综合考虑,未能充分利用机组间的协调控制能力,导致系统在复杂工况下的稳定性和响应速度仍有提升空间。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:现有的验证低频振荡阻尼控制效果方法存在局限性较大,缺乏系统化验证,缺乏对系统整体性能的综合考虑,以及如何系统化验证gpss的抑振效果的优化问题。
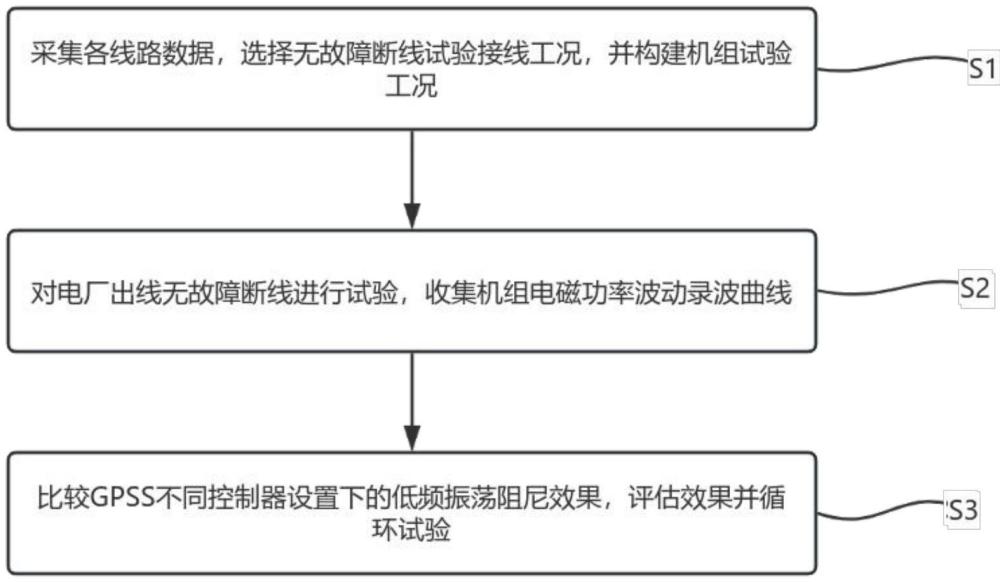
3、为解决上述技术问题,本发明提供如下技术方案:一种验证gpss低频振荡阻尼控制效果的方法,包括选择无故障断线试验接线工况,并构建机组试验工况;对电厂出线无故障断线进行试验,收集机组电磁功率波动录波曲线;比较不同gpss控制器设置下的低频振荡阻尼效果,评估效果并循环试验。
4、作为本发明所述的验证gpss低频振荡阻尼控制效果的方法的一种优选方案,其中:所述选择无故障断线试验接线工况包括确定等效阻抗并分析系统稳定性,通过计算多线路的等效阻抗,综合评估线路阻抗和电抗对系统的影响,汇总所有线路的电阻和电抗,结合线路的视在功率,加权平均计算等效阻抗,引入微调参数,对各线路功率的符号进行校正,等效阻抗表示为:
5、
6、其中,zeq为系统等效阻抗,ri为第i条线路的电阻,xi为第i条线路的电抗,si为第i条线路的视在功率,∈为微调参数,sign为符号函数,pi为第i条线路的功率,对系统稳定性进行分析,系统稳定性通过系统特征值的实部衡量,特征值的实部越小,系统稳定性越高,通过求解系统矩阵的特征值,并取实部的最小值作为系统稳定性指标,表示为:
7、ysys=min(re(λi))
8、其中,ysys为系统特征值,λi为第i个特征值,re为实部。
9、作为本发明所述的验证gpss低频振荡阻尼控制效果的方法的一种优选方案,其中:所述构建机组试验工况包括配置机组出力,基于每个机组的基准出力,计算所有机组的总出力,并引入动态调整因子,模拟机组在实际运行中的出力波动,表示为:
10、
11、其中,ptotal为所有机组的总出力,pj,base为第j个机组的基准出力,aj为第j个机组的出力波动幅度,ω为角频率,φj为第j个机组的相位,m为机组数,t为时间,基于每个机组对控制参数的敏感性及系统等效阻抗对总出力的影响,通过最小化各机组出力对控制参数的导数平方和,结合等效阻抗对总出力的导数平方和,得到控制参数设置,表示为:
12、
13、其中,kopt为控制参数。
14、作为本发明所述的验证gpss低频振荡阻尼控制效果的方法的一种优选方案,其中:所述对电厂出线无故障断线进行试验包括评估电磁功率波动程度,基于总出力,结合动态调整因子,模拟断线情况下的功率波动,在功率波动的模拟中,结合系统特征值,动态调整功率波动的幅度,反映断线情况下系统的响应特性,通过计算功率波动的方差,量化波动的程度,方差越大,功率波动越剧烈,系统稳定性越差,通过积分计算整个周期内的功率波动方差,评估系统在断线情况下的稳定性,表示为:
15、
16、其中,p(t)为时间t时的功率,k为衰减系数,α为指数衰减常数,β为波动频率,γ为相位角,η为修正系数,λ为非线性系数,η为时间常数,为功率波动方差,t为周期,为平均功率。
17、作为本发明所述的验证gpss低频振荡阻尼控制效果的方法的一种优选方案,其中:所述收集机组电磁功率波动录波曲线包括分析系统响应特性,计算有效值电压,获取系统在整个周期内的电压波动情况,结合正弦函数和平滑参数模拟功率波动曲线,对功率波动方差进行修正,反映系统在断线情况下的功率波动,表示为:
18、
19、其中,vrms为有效值电压,v(t)为时间t时的电压,δ为加权系数,δp(t)为时间t时的功率波动,θ为平滑参数,k为时间常数。
20、作为本发明所述的验证gpss低频振荡阻尼控制效果的方法的一种优选方案,其中:所述比较不同gpss控制器设置下的低频振荡阻尼效果包括计算阻尼比,量化系统在不同控制参数下的阻尼效果,结合初始频率偏移量、系统固有频率、阻尼振荡频率及功率波动曲线的修正,计算频率偏移量,通过动态调整频率偏移量,反映系统在不同控制参数下的响应特性,表示为:
21、
22、其中,ζ为阻尼比,c为阻尼系数,m1为质量,k1为刚度,δ为积分系数,ρ为时间衰减系数,δf(t)为时间t时的频率偏移量,δf0为初始频率偏移量,ωn为系统固有频率,ωd为阻尼振荡频率,μ为时间常数,v为衰减因子。
23、作为本发明所述的验证gpss低频振荡阻尼控制效果的方法的一种优选方案,其中:所述评估效果并循环试验包括优化控制参数,通过比较新阻尼比和旧阻尼比,计算阻尼比变化量,新阻尼比根据最新试验数据计算得到,旧阻尼比为优化前的基准值,阻尼比变化量反映出在当前配置下gpss对系统稳定性的影响,若变化量为正且大于阈值,表示gpss的阻尼提升效果有效,试验结束,若变化量较为负数或小于阈值,则对控制器的超前滞后参数进行优化,并重复试验,表示为:
24、δζ=ζn-ζo
25、
26、其中,δζ为阻尼比变化量,ζn为新阻尼比,ζo为旧阻尼比,ζt为阻尼提升效果阈值,τ'lead-lag为调整后的超前滞后时间常数,τlead-lag为原始超前滞后时间常数,dτlead-lag为阻尼比对超前滞后时间常数的导数,δτlead-lag为超前滞后时间常数变化量。
27、本发明的另外一个目的是提供一种验证gpss低频振荡阻尼控制效果的系统,其能通过试验收集模块对电厂出线进行无故障断线试验,并系统化地收集机组电磁功率波动录波曲线,解决了目前难以量化系统响应的问题。
28、作为本发明所述的验证gpss低频振荡阻尼控制效果的系统的一种优选方案,其中:包括试验工况模块、试验收集模块、比较评估模块;所述试验工况模块用于选择无故障断线试验接线工况,并构建机组试验工况;所述试验收集模块用于对电厂出线无故障断线进行试验,收集机组电磁功率波动录波曲线;所述比较评估模块用于比较不同gpss控制器设置下的低频振荡阻尼效果,评估效果并循环试验。
29、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序是实现验证gpss低频振荡阻尼控制效果的方法的步骤。
30、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现验证gpss低频振荡阻尼控制效果的方法的步骤。
31、本发明的有益效果:本发明提供的验证gpss低频振荡阻尼控制效果的方法通过优化接线工况,减少了实际试验中可能的风险,提高了试验的成功率和安全性,通过计算各机组的总出力,提升了试验的代表性,提高了系统的稳定性和抗振能力,通过计算系统的阻尼比和频率偏移量,详细评估了不同gpss控制器设置下系统的稳定性,提升了系统的整体稳定性和抗振能力,通过优化控制参数,动态调整控制增益,提高了系统的稳定性和响应速度,本发明在安全性、成功率和抗振能力方面都取得更加良好的效果。
- 还没有人留言评论。精彩留言会获得点赞!