一种基于影像的船载点云纠正方法与流程
本发明涉及海量,具体涉及一种基于影像的船载点云纠正方法。
背景技术:
1、激光三维扫描设备一般由激光器、光学相机、定位设备和姿态测量设备等组成,其通过激光测距的原理,把激光先投射到被测物体表面,继而反射回扫描仪内的传感器中,扫描仪据此计算其与物体的距离,结合测距的位置和姿态可确定物体在空间中的位置,进而得到三维点云数据,结合同步获取的影像数据可以得到彩色的点云数据。
2、该技术能快速获取海量高精度三维点云数据,是一种高效的数据采集方法,已经广泛应用于各个测量领域,可通过机载、车载、船载、背包等多种方式进行移动数据采集。机载和车载方式测量平台相对稳定,基本不存在低频抖动;背包方式更加稳定;而船载方式受船舶发动机低频抖动影响,存在无法消除且无法通过姿态测量设备进行修正的振动,导致点云数据出现大量无法通过常规后处理方式进行修复的抖动,导致获取数据无效需要重测,而重测时因为船舶抖动的始终存在难以克服,进而导致测量任务无法完成。
技术实现思路
1、本发明的目的是提供一种基于影像的船载点云纠正方法,用于解决船载方式进行三维激光扫描测量时激光器受船舶发动机抖动影响,点云数据发生无法通过姿态数据进行修正的抖动问题。
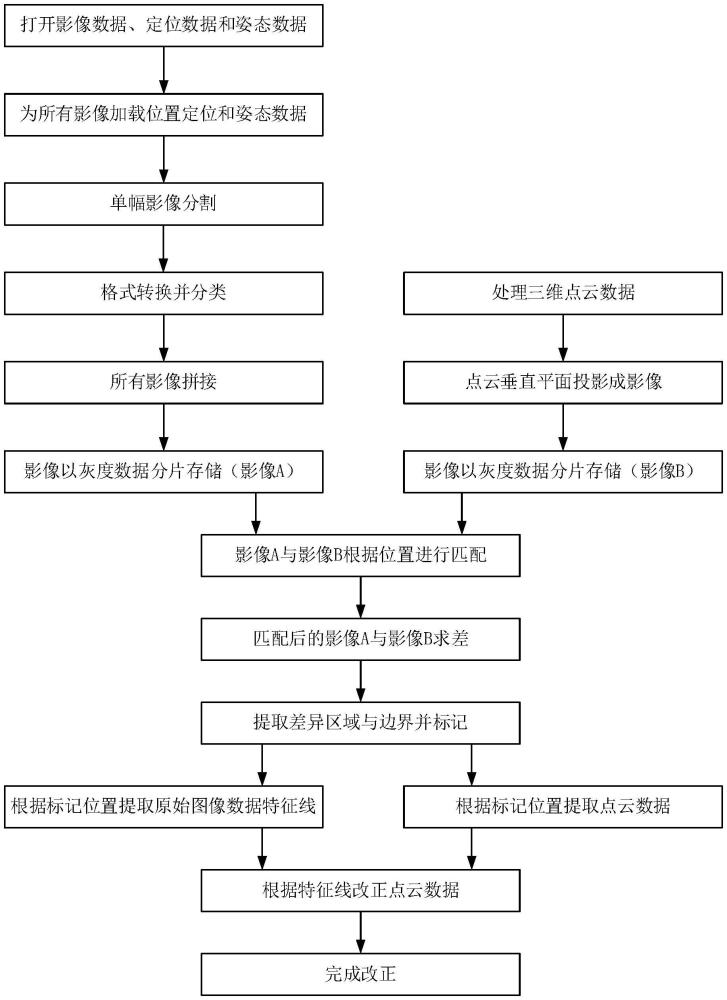
2、为了实现上述目的,本发明提供如下技术方案:一种基于影像的船载点云纠正方法,包括以下步骤:
3、s01、对三维激光扫描数据进行处理,并以点云格式保存,所述点云格式包括:las格式、pts格式或者xyz格式的数据;
4、s02、打开三维点云采集时同步获取的影像数据及其对应的定位数据和姿态数据,以生成三维点云数据;
5、s03、对所述影像数据按既定处理策略执行数据处理,以生成影像集a;
6、s04、对三维点云数据进行预处理,以获取的图像格式的映射的数据,以生成影像集b;
7、s05、对影像集a和影像集b进行匹配机制的处理,以判断所述三维点云数据是否存在异常区域,并将存在异常区的所述三维点云数据整理成为异常点云集合;
8、s06、基于插值算法对所述异常点云集合进行处理,以获取修正数据;
9、s07、将所述修正数据,重新执行步骤s04到步骤s04,直到无异常数据发生,则将数据进行存储。
10、作为优选的,所述步骤s03中既定处理策略对所述影像数据的处理包括以下步骤:
11、s31、加载影像数据以及该影像数据下每一帧原始图像对应的定位数据和姿态数据;
12、s32、将所述原始图像的格式进行识别,并主动修改为png格式;
13、s33、根据船载摄影测量的特点对所述影像的图像进行分割:
14、s33a、通过已有算法识别图像的水体、天空、植被及人工建筑物;
15、s33b、设置png图像中水体和天空的alpha通道数据为0,达到透明化;
16、s33c、对于植被等非人工构筑物,将alpha通道数值设置为100;
17、s33d、对于堤坝、水闸及各类人工建筑,则alpha通道数值设置为255,达到完全不透明状态;
18、s34、对分割处理后的影像结合定位数据和姿态数据进行二维拼接,并按照一定的重叠度进行分片存储,并转换为灰度影像,生产影像集a。
19、作为优选的,所述步骤s04中对三维点云数据进行预处理,包括以下步骤:
20、s41、加载原始采集影像的定位数据,根据定位数据计算三维点云数据生成图像的中心点,并根据用户设置的重叠度x重叠度以生成图像的范围;
21、s41、对连续三幅图像的定位数据生成中间的图像计算,则定位数据为(xn-1,yn-1,zn-1),(xn,yn,zn),(xn+1,yn+1,zn+1),则生成图像的点云数据范围为
22、s42、基于点云数据范围选取对应的点云,将已知范围内的点云数据转换为图像坐标系数据,转换为:
23、
24、其中,h图像表示图像的灰度数据;
25、s43、灰度值取值为0~255,得到图像(x图像,y图像,h图像),将x及y的数据映射到0到对应的最大值,将h的数据映射到0~255,求取h最大值hmax及最小值hmin,则:
26、
27、作为优选的,所述步骤s05中对影像集a和影像集b进行匹配机制的处理,包括:
28、s51、将地理位置坐标作为初始条件,对影像集a和影像集b使用基于定向直方图描述符之一的尺度不变特征转换算法对图像进行匹配,分别获取影像集a中的图像c和影像集b中的图像d;
29、s52、根据图像c的长宽对图像d采用三次b样条插值进行重采样,得到图像e,
30、s53、再通过三次b样条插值算法使用图像d的4×4个像素点的数据计算图像e目标像素点(x′,y′)的灰度值:
31、
32、w(i,j)=w(di)×w(dj)
33、
34、di=p(i,j).x-x′;
35、dj=p(i,j)·y-y′;
36、使重采样之后的图像e与图像c的大小与分辨率一致。
37、作为优选的,所述步骤s05中判断所述三维点云数据是否存在异常区域包括以下步骤:
38、s54、对图像c和图像e对应像素值的灰度相减,得到图像f,其中:图像f表示图像c和图像e的灰度差;
39、s55、读取图像f的最小灰度值并从图像f中减去该值,得到图像g,以消除图像c和图像e的系统性灰度差值;
40、s56a、若激光点云不存在抖动的异常数据,则图像g的灰度值应该在0附近,整体呈现出黑色;
41、s56b、若激光点云存在抖动的异常数据的区域,灰度值较大,整体呈现出高亮的特征,通过灰度值是否大于用户给定阈值提取异常数据区域;
42、s57、将步骤s56b中提取的异常区域投影到图像c中,利用霍夫变换检测是否存在直线:
43、若存在直线,则直接提取该线段;
44、若不存在,则删除该异常区域,处理结束。
45、作为优选的,所述步骤s06中基于插值算法对所述异常点云集合进行处理的步骤包括:
46、s61、读取图像c及其地理位置、存在异常区域及特征线;
47、s62、对异常区域,通过三次b样条插值算法计算图像d的对应区域,并计算特征线在图像d的对应线;
48、s63、计算的数据从图像坐标系换算到点云坐标系:
49、
50、数据分别存放在(x异常,y异常,z异常)和(x特征,y特征,z特征)集合中。
51、作为优选的,所述步骤s06中获取的修正数据,是以特征线的数据作为约束条件,修正点云姿态,并因移动激光点云一般采用线扫描方式进行,故对此每个点的测量方程可以表示为:
52、
53、则异常数据在高程方向的ω角度发生错误,因此:
54、
55、利用该修正值重新计算异常点的坐标,得到(x修正,y修正,z修正)数据。
56、在上述技术方案中,本发明提供的一种基于影像的船载点云纠正方法,具备以下有益效果:利用激光点云数据生成灰度图像,并与测量过程中同步采集的影像数据进行求差,自动识别存在异常抖动的点云数据;利用测量过程中同步采集的影像数据提取特征线,作为点云数据修复的约束条件。通过影像增加约束自动修复因船舶发动机等各种振动导致的点云数据含有无法被姿态传感器补偿的问题,解决了船载测量的振动问题。
- 还没有人留言评论。精彩留言会获得点赞!