一种笼养死鸡位置检测方法、系统、设备和存储介质
本发明涉及一种笼养死鸡位置检测方法、系统、设备和存储介质,属于家禽养殖。
背景技术:
1、我国规模化蛋鸡养殖目前仍以传统笼养为主,据统计,在规模化养殖场中,每天约有万分之一到万分之二的鸡只死亡,在密集的养鸡环境中,死去的鸡只若不及时处理,发生腐烂甚至自溶现象,可能会引发病菌滋生、疾病扩散、舍内空气环境污染,成为疾病传播的源头,对整个鸡群健康造成严重威胁,甚至引发鸡群传染病,造成重大经济损失,威胁人类健康。因此,及时清除死鸡是规模化养殖场的一项重要日常工作。目前,国内家禽养殖场在死鸡巡捡方面还大都采取人工的方式,尤其对于一些单栋养殖量上十万只的大型鸡舍,每天需要饲养员花费数小时巡检死鸡,顶层鸡笼还需要爬高检查,不仅耗费大量的时间和体力,也容易因鸡只遮挡、巡视疏漏等原因漏检死鸡,导致死鸡长时间遗留在鸡笼中,引发环境安全隐患。为了能够解决实际生产中的捡拾死鸡的问题,开发一种高效、不遗漏地死鸡位置检测方法是十分有必要的。
2、现有技术中,已经有大量针对死鸡位置检测的方法,其中一种方法是通过巡视机器人搭载的双目可见光相机和热红外相机识别每只鸡的运动状态和体温来识别病死鸡,减少了人力成本,双决策逐只检测,提高了识别准确率,但由于笼养鸡笼饲养密度较大且采食槽在走道一侧,鸡只大部分时间会聚集在食槽采食或趴卧产蛋,所以死鸡很容易会被其他鸡只遮挡,不易被走道内的巡检摄像头发现,产生遗漏现象,进而导致死鸡长时间在鸡笼内滞留腐烂,污染舍内环境,影响活鸡健康。另一种方法是通过识别异常鸡粪反向推演出鸡笼的位置,但该方法计算鸡笼前需要在每层清粪带上做距离标记进行相机标定,人工标记可能被鸡只粪便遮盖且过程较繁琐。还有一种方法是通过ccd相机依次采集传送带上鸡粪便的图像,根据粪便的颜色和稀稠程度与已知的粪便-疾病关系进行对比得到粪便的种类,对各个鸡笼内鸡群健康进行监测。该技术可以准确判定家禽的健康状态,但是由于鸡笼溯源方法不够精确,不易确定异常的家禽所在的具体鸡笼以便实施针对性的解决措施。
技术实现思路
1、针对笼养鸡舍内死鸡巡检人工劳动量大、死鸡易被遮挡的问题,本发明的目的是提供一种死鸡位置检测方法、系统、设备和存储介质,以解决死鸡被遮挡而不易捡出的问题,保证鸡笼位置溯源便捷而准确。
2、为实现上述目的,本发明采取以下技术方案:
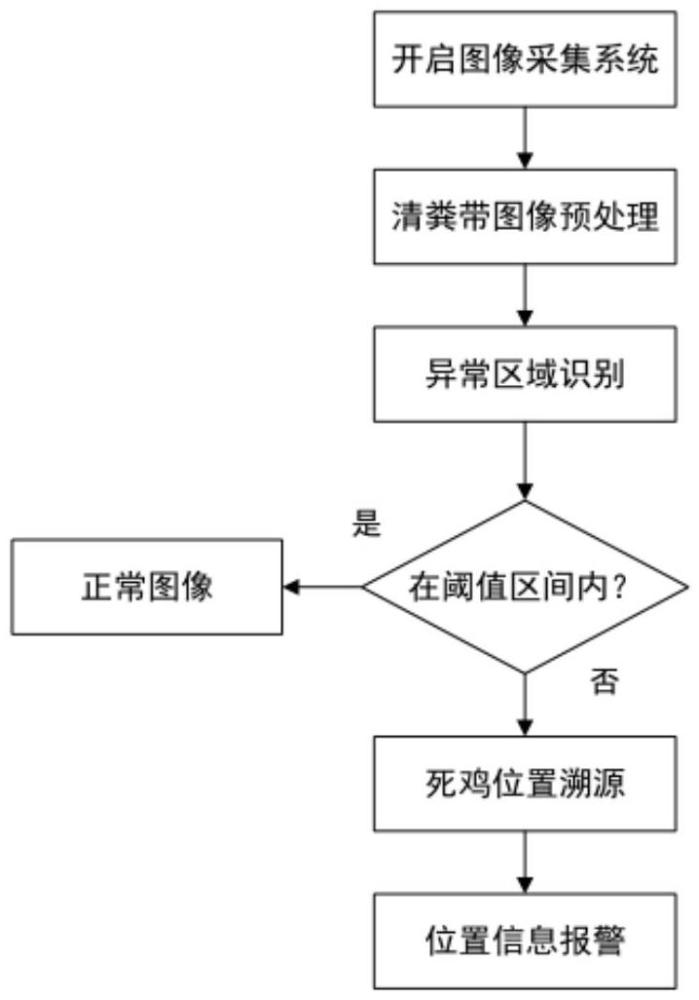
3、第一方面,本发明提供一种笼养死鸡位置检测方法,包括以下步骤:
4、获取清粪带图像;
5、对清粪带图像进行预处理,获得待识别图像序列;
6、对待识别图像序列中的异常区域进行识别;
7、基于识别的异常区域,结合清粪带转速数据对死鸡位置进行溯源;
8、基于死鸡位置溯源结果进行报警,以供工作人员及时定点捡拾死鸡。
9、进一步,所述获取清粪带图像,包括:
10、在每层近出粪口端的笼具尾架上安装图像采集装置;
11、令图像采集装置与清粪过程同步开启,随着清粪带水平位移依次采集清粪带图像。
12、进一步,所述对清粪带图像进行预处理,获得待识别图像序列,包括:
13、对清粪带图像进行分割裁剪,使每组鸡笼对应一张长宽一致的对应裁剪图像,按照鸡笼序号给各裁剪图像标注编号,获得编号图像序列;
14、通过计时系统获取编号图像序列中每张编号图像对应的时间,对每张编号图像的时间标签进行标注;
15、消除编号图像序列中落在深色鸡粪上的白色鸡只羽毛,获得待处理编号图像序列;
16、对待处理编号图像序列进行二值化处理,获得二值图像序列;
17、采用膨胀腐蚀运算处理方法对二值图像序列进行细小白色孔洞填充,获得待识别图像序列。
18、进一步,所述消除编号图像序列中落在深色鸡粪上的白色鸡只羽毛,获得待处理编号图像序列,包括以下步骤:
19、将编号图像序列转化为hsv颜色空间;
20、基于目标剔除区域的预设白色阈值识别出白色羽毛区域及其轮廓,同时保留清粪带其他区域的颜色;
21、计算白色羽毛区域轮廓外部预设范围的颜色空间均值,将白色羽毛区域及其轮廓的颜色空间转化为均值颜色,获得待处理编号图像序列。
22、进一步,所述对待处理编号图像序列进行二值化处理,获得二值图像序列,包括:
23、统计待处理编号图像序列的灰度直方图,得到待处理编号图像序列灰度级的像素数目;
24、从预设阈值范围内随机选择一阈值,并基于像素数目计算根据该阈值将待处理编号图像序列分为前景和背景的类内方差;
25、重复上一步骤,遍历所有阈值,并根据类内方差最小值确定最佳阈值;
26、基于最佳阈值将待处理编号图像序列进行二值化处理,获得二值图像序列。
27、进一步,所述对待识别图像序列中的异常区域进行识别,包括以下两种路径:
28、路径一:将待识别图像序列中的白色区域划分为若干个白色拟合连通域,将各白色拟合连通域拟合为闭合椭圆;设置白色拟合连通域的像素面积正常阈值区间和闭合拟合椭圆的长短轴正常阈值区间,识别并计算待识别图像序列中白色拟合连通域的像素面积和其闭合拟合椭圆的长轴、短轴,与阈值区间相比较,筛选出异常图像;
29、路径二:将待识别图像序列进行10*10网格化分割处理,计算同一鸡笼连续前若干次清粪对应待识别图像各网格内像素平均值、标准差、阈值区间,将本次待识别图像各网格像素平均值与正常阈值区间相比较,筛选出异常图像。
30、第二方面,本发明提供一种笼养死鸡位置检测系统,包括:
31、图像采集装置,用于获取清粪带图像;
32、图像预处理模块,用于对清粪带图像进行预处理,获得待识别图像序列;
33、异常区域识别模块,用于对待识别图像序列中的异常区域进行识别;
34、死鸡位置溯源模块,用于基于识别的异常区域,结合清粪带转速数据对死鸡位置进行溯源;
35、显示终端,用于基于死鸡位置溯源结果进行报警,以供工作人员及时定点捡拾死鸡。
36、进一步,所述图像采集装置包括摄像头、补光模块以及控制模块;
37、所述摄像头设置在每层进出粪口端的笼具尾架上,所述补光模块设置在所述摄像头的旁侧,且所述补光模块中集成设置有感光模块,所述感光模块用于感应鸡笼笼架出粪口处的实际光照环境亮度并发送到所述控制模块,由所述控制模块根据实际光照环境亮度调节所述补光模块的光照亮度;
38、所述控制模块还用于通过运动检测算法实时监测所述清粪带的启停,当清粪带开始水平运动时,同步开启所述摄像头进行图像采集,当清粪带停止水平运动时,同步关闭所述摄像头,得到清粪带图像。
39、第三方面,本发明提供一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行任一方法。
40、第四方面,本发明提供一种计算设备,包括:一个或多个处理器及存储器,所述存储器中存储有一个或多个程序,并被配置为所述一个或多个处理器执行,所述一个或多个程序包括用于执行任一方法的指令。
41、本发明由于采取以上技术方案,其具有以下优点:
42、1、本发明通过采集并识别每层鸡笼清粪带的鸡粪分布情况并根据异常图像的时间标签和转速传感器采集的清粪带运行速度溯源死鸡所在鸡笼,避免了死鸡因被遮挡而遗漏的情况,同时可以精准、快速定位死鸡所在鸡笼。
43、2、由于本发明的图像采集系统配置了补光装置,故提高了在光线环境较差的饲养层之间的亮度,采集的清粪带图像的噪声更小,清晰度更高。
44、3、由于本发明的补光装置配置了感光模块,在光照环境有所差异鸡舍内,避免了补光亮度过高或过低导致的清粪带图像过度曝光或曝光不足的问题,影响后续图像处理和识别效果。
45、4、由于本发明设置了运动检测算法,在清粪时开启图像采集系统,在清粪结束时关闭图像采集系统,故节省了电力能源消耗和存储空间。
46、5、由于本发明设置了白色羽毛消除算法,在膨胀腐蚀等图像预处理操作的基础上进一步消除了实际生产中落在清粪带鸡粪上的白色鸡只羽毛,故减小了异常图像识别误差,提高了后续识别的准确度。
47、6、由于本发明异常区域识别算法包括异常白色拟合连通域识别和网格化局部识别两种路径,对应实际生产中死鸡位于鸡粪密集区上方和鸡粪稀疏区上方两种情况,两种算法路径同步进行识别,提高了识别范围和识别精度。
48、7、由于本发明通过获取清粪带的实时转速计算异常图像偏移距离,减少了清粪带实际运行中因速度不均、异常停转引起的异常图像偏移距离计算误差,以定积分计算异常图像实际偏移距离,计算结果更加准确。
49、8、由于本发明采用编制的鸡笼位置编号规则进行死鸡位置报警,使报警信息更加简洁明了,方便工作人员根据死鸡位置报警信息及时捡除死鸡。
50、因此,本发明可以广泛应用于家禽养殖技术领域。
- 还没有人留言评论。精彩留言会获得点赞!