点云数据筛选方法、设备及存储介质与流程
本技术涉及数据标注,具体而言,涉及一种点云数据筛选方法、设备及存储介质。
背景技术:
1、在计算机视觉和机器学习领域,随着激光雷达和深度摄像头等传感器技术的发展,可以采集并生成包含丰富空间信息的高精度三维点云数据,但这些初始获取到的三维点云数据通常缺乏结构信息及语义信息,需要进一步对其进行语义分割标注。
2、在数据标注领域,点云语义分割标注旨在根据点云数据的空间几何结构和形状信息,将不同区域的点云数据精准分割成具有不同语义标签的子集,如道路、车辆、行人等,并利用计算机视觉算法对这些子集及其标签进行分析及模型训练,使得训练后的识别模型能够根据点云数据识别和区分当前环境中的各种元素,从而构建详细复杂的环境模型。
3、点云语义分割标注的关键在于使用标注工具在复杂的3d场景中选取特定区域的点云,并对选中的点云标注语义特征。目前,常规的点云筛选方法是:首先将3d点云数据投影至指定的平面,通过该平面绘制图形,然后从3d点云数据进行遍历筛选出落入该图形内部的点。
4、然而,上述方法在点云数据筛选过程中需要对场景中每一个点云进行遍历计算,以判断各个点云是否被选中,因此尤其是对于一些大数量级的点云场景而言,采用现有方法进行点云筛选需要耗费大量计算性能和时间,导致标注工具发生延迟和卡顿,标注效率较低。
技术实现思路
1、本技术实施例的目的在于提供一种点云数据筛选方法、设备及存储介质,用以解决点云筛选过程中需要全量计算所有点云数据导致标注效率低下的问题。
2、第一方面,本技术实施例提供了一种点云数据筛选方法,包括:
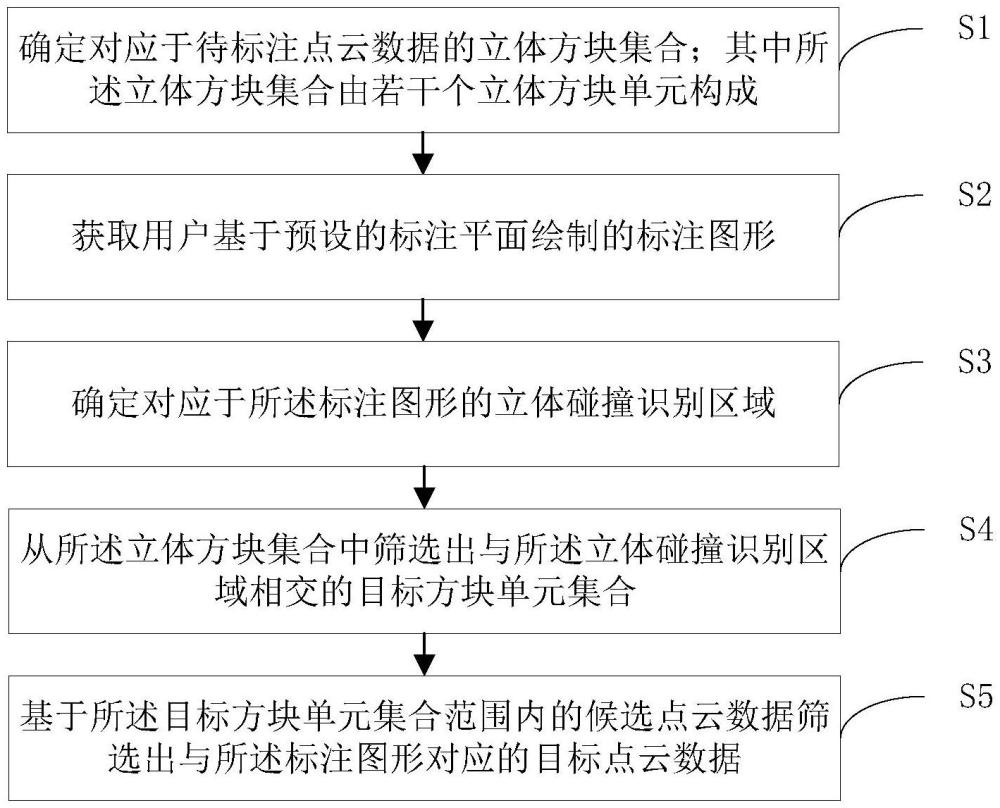
3、确定对应于待标注点云数据的立体方块集合;其中所述立体方块集合由若干个立体方块单元构成;
4、获取用户基于预设的标注平面绘制的标注图形;
5、确定对应于所述标注图形的立体碰撞识别区域;
6、从所述立体方块集合中筛选出与所述立体碰撞识别区域相交的目标方块单元集合;
7、基于所述目标方块单元集合范围内的候选点云数据筛选出与所述标注图形对应的目标点云数据。
8、在本技术实施例中,通过将点云数据所占空间区域划分为多个立体方块的集合,然后基于标注图形筛选出符合相交条件的目标方块,再从目标方块包围的点云数据中筛选出标注图形对应的目标点云,从而大大较少了点云数据筛选过程的计算量,提高了点云数据的标注效率。
9、在一些可能的实施例中,所述确定对应于待标注点云数据的立体方块集合,包括:
10、确定对应于所述待标注点云数据的原始立体空间区域;
11、基于预设的点云数量阈值对所述原始立体空间区域进行八叉树切分,得到对应于待标注点云数据的立体方块集合;
12、其中,所述立体方块集合由若干个立体方块单元构成,且每一所述立体方块单元中包含的点云数量均大于所述点云数量阈值。
13、在本技术实施例中,通过八叉树切分的方式确定对应于待标注点云数据的立体方块集合,进一步提高了获取立体方块集合的效率。
14、在一些可能的实施例中,所述确定对应于所述标注图形的立体碰撞识别区域,包括:
15、确定对应于所述标注图形的外接圆,基于所述外接圆确定对应于所述标注图形的立体碰撞识别区域。
16、在本技术实施例中,通过以标注图形的外接圆来确定立体碰撞识别区域,从而进一步提高点云数据筛选过程的效率。
17、在一些可能的实施例中,所述基于所述外接圆确定对应于所述标注图形的立体碰撞识别区域,包括:
18、基于所述外接圆的圆心构建垂直于所述标注平面的射线,并将距离所述射线处于所述外接圆的半径范围内的区域确定为立体碰撞识别区域。
19、在本技术实施例中,通过基于外接圆圆心构建垂直于所述标注平面的射线,并根据射线在外接圆半径限制范围内的区域确定为立体碰撞识别区域,进一步提高了点云数据筛选过程的效率。
20、在一些可能的实施例中,所述从所述立体方块集合中筛选出与所述立体碰撞识别区域相交的目标方块单元集合,包括:
21、基于单个立体方块单元的边长和所述立体碰撞识别区域的碰撞半径确定相交距离阈值;
22、获取各个立体方块单元的中心点与所述射线的垂直距离,并将垂直距离小于所述相交距离阈值对应的立体方块单元筛选出来构成所述目标方块单元集合。
23、在本技术实施例中,通过利用立方体中心点与射线的垂直距离判断各个立方体是否与立体碰撞识别区域相交,进一步提高了点云数据筛选过程的效率。
24、在一些可能的实施例中,所述基于所述目标方块单元集合范围内的候选点云数据筛选出与所述标注图形对应的目标点云数据,包括:
25、确定所述目标方块单元集合范围内的第一候选点云数据,并从所述第一候选点云数据中筛选出落入所述立体碰撞识别区域内的第二候选点云数据;
26、从所述第二候选点云数据中筛选出与所述标注图形对应的目标点云数据。
27、在本技术实施例中,通过首先从目标方块单元范围内的第一候选点云数据筛选出落入立体碰撞识别区域内的第二候选点云数据,然后再从第二候选点云数据中筛选标注图形对应的目标点云数据,进一步提高了点云数据筛选过程的效率。
28、在一些可能的实施例中,所述从所述第二候选点云数据中筛选出与所述标注图形对应的目标点云数据,包括:
29、获取所述第二候选点云数据中各个候选点投影至所述标注平面的二维坐标;
30、从所述第二候选点云数据中筛选出二维坐标落入所述标注图形内对应的候选点,得到所述目标点云数据;或者,对所述第二候选点云数据中二维坐标未落入所述标注图形内对应的候选点进行过滤,得到所述目标点云数据。
31、在本技术实施例中,通过获取第二候选点云数据的各个点云投影至标注平面的二维坐标信息,再根据二维坐标与标注图形进行比较以筛选出标注图形对应的目标点云数据,从而进一步提高了点云数据筛选过程的效率。
32、第二方面,本技术实施例提供了一种点云数据筛选装置,包括:
33、方块确定模块,用于确定对应于待标注点云数据的立体方块集合;其中所述立体方块集合由若干个立体方块单元构成;
34、图形标注模块,用于获取用户基于预设的标注平面绘制的标注图形;
35、区域确定模块,用于确定对应于所述标注图形的立体碰撞识别区域;
36、方块筛选模块,用于从所述立体方块集合中筛选出与所述立体碰撞识别区域相交的目标方块单元集合;
37、点云筛选模块,用于基于所述目标方块单元集合范围内的候选点云数据筛选出与所述标注图形对应的目标点云数据。
38、第三方面,本技术实施例提供了一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述程序时可实现第一方面任一实施例所述的方法。
39、第四方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时可实现第一方面任一实施例所述的方法。
40、第五方面,本技术实施例提供了一种计算机程序产品,所述的计算机程序产品包括计算机程序,其中,所述的计算机程序被处理器执行时可实现第一方面任一实施例所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!