激光雷达目标框的检测方法、装置、电子设备及存储介质与流程
本发明涉及计算机,具体涉及一种激光雷达目标框的检测方法、装置、电子设备及存储介质。
背景技术:
1、随着社会的发展,智能化设备的功能不断完善,而在众多智能化场景中物体检测是必不可少的环节,物体检测是指利用计算机技术检测与识别出周围环境中物体对象的技术,例如在自动驾驶、机器人控制等场景下均需要对周围环境的对象进行识别,而物体检查的方式可以有点云数据分析、图像识别、红外识别等方式;其中点云数据分析由于其精准度较高,被广泛应用于高精度要求的场景下,如车辆自动驾驶等。
2、而现有自动驾驶的点云数据分析过程中,主要是依赖激光雷达采集点云数据,并采用深度学习算法对该点云数据进行对象识别处理输出识别结果,其中深度学习算法输出的识别结果通常为识别对象的目标框,但是深度学习算法的输出结果具备不可解释性,也即存在自动驾驶分析过程中无法对目标框进行质量评定的问题。
技术实现思路
1、本技术提供了一种激光雷达目标框的检测方法、装置、电子设备及存储介质,以解决由于深度学习算法输出结果的不可解释性所存在自动驾驶分析过程中无法对目标框进行质量评定的问题。
2、第一方面,本技术提供了一种激光雷达目标框的检测方法,包括:
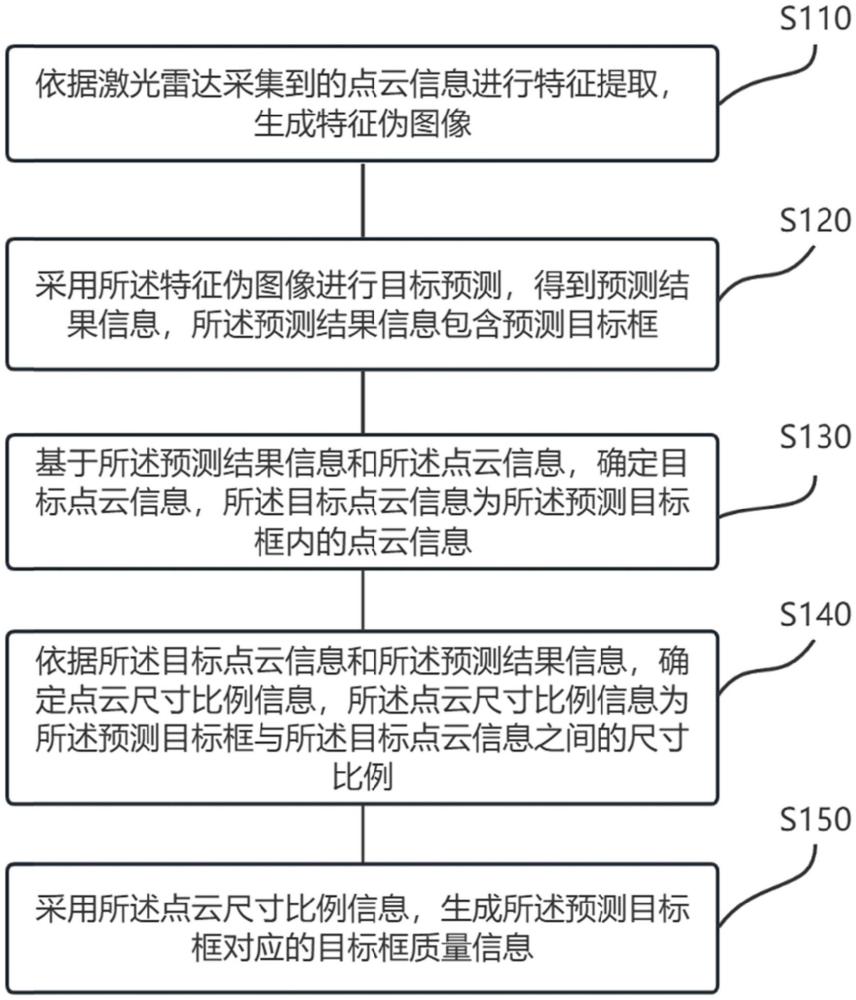
3、依据激光雷达采集到的点云信息进行特征提取,生成特征伪图像;
4、采用所述特征伪图像进行目标预测,得到预测结果信息,所述预测结果信息包含预测目标框;
5、基于所述预测结果信息和所述点云信息,确定目标点云信息,所述目标点云信息为所述预测目标框内的点云信息;
6、依据所述目标点云信息和所述预测结果信息,确定点云尺寸比例信息,所述点云尺寸比例信息为所述预测目标框与所述目标点云信息之间的尺寸比例;
7、采用所述点云尺寸比例信息,生成所述预测目标框对应的目标框质量信息。
8、可选的,所述依据所述目标点云信息和所述预测结果信息,确定点云尺寸比例信息,包括:
9、从所述预测结果信息中,提取所述预测目标框对应的目标框尺寸信息;
10、依据所述目标点云信息,生成目标点云分布尺寸信息;
11、采用所述目标框尺寸信息与所述目标点云分布尺寸信息进行尺寸比例计算,生成所述点云尺寸比例信息。
12、可选的,所述目标点云信息中包含至少两个目标点云,所述依据所述目标点云信息,生成目标点云分布尺寸信息,包括:
13、依据所述预测目标框,确定目标坐标系;
14、基于所述目标坐标系,确定所述目标点云信息中每一个所述目标点云对应的点云坐标信息;
15、采用所述点云坐标信息,生成所述目标点云分布尺寸信息。
16、可选的,所述目标坐标系包含横向坐标轴、纵向坐标轴以及竖向坐标轴,所述采用所述点云坐标信息,生成所述目标点云分布尺寸信息,包括:
17、基于所述横向坐标轴,结合所述点云坐标信息进行点云分布计算,得到第一横轴尺寸,所述第一横轴尺寸为在所述横向坐标轴的方向上所述目标点云的分布尺寸;
18、依据所述纵向坐标轴,结合所述点云坐标信息进行点云分布计算,得到第一纵轴尺寸,所述第一纵轴尺寸为在所述纵向坐标轴的方向上所述目标点云的分布尺寸;
19、基于所述竖向坐标轴,结合所述点云坐标信息进行点云分布计算,得到第一竖轴尺寸,所述第一竖轴尺寸为在所述竖向坐标轴的方向上所述目标点云的分布尺寸;
20、采用所述第一横轴尺寸、所述第二横轴尺寸以及所述第三横轴尺寸,生成所述目标点云分布尺寸信息。
21、可选的,所述采用所述目标框尺寸信息与所述目标点云分布尺寸信息进行尺寸比例计算,生成所述点云尺寸比例信息,包括:
22、从所述目标框尺寸信息中提取目标框边尺寸;
23、从所述目标点云分布尺寸信息中提取点云分布边尺寸;
24、采用目标框边尺寸和所述点云分布边尺寸进行尺寸比例计算,生成所述点云尺寸比例信息。
25、可选的,采用目标框边尺寸和所述点云分布边尺寸进行尺寸比例计算,生成所述点云尺寸比例信息,包括:
26、从所述点云分布边尺寸中,提取第一横轴尺寸、第一纵轴尺寸以及第一竖轴尺寸;
27、从所述目标框边尺寸中,提取第二横轴尺寸、第二纵轴尺寸以及第二竖轴尺寸;
28、确定所述第一横轴尺寸与所述第二横轴尺寸之间的第一比例、所述第一纵轴尺寸与所述第二纵轴尺寸之间的第二比例,以及所述第一竖轴尺寸与所述第二竖轴尺寸之间的第三比例;
29、采用所述第一比例、第二比例以及第三比例,生成所述点云尺寸比例信息。
30、可选的,所述预测目标框包含目标框表面,所述采用所述点云坐标信息,生成所述目标点云分布尺寸信息,包括:
31、基于所述目标坐标系,构建所述目标框表面对应的点云分布区域;
32、采用所述点云坐标信息,确定所述点云分布区域的点云分布面尺寸;
33、依据所述点云分布面尺寸,生成所述目标点云分布尺寸信息。
34、可选的,采用所述目标框尺寸信息与所述目标点云分布尺寸信息进行尺寸比例计算,生成所述点云尺寸比例信息,包括:
35、从所述目标框尺寸信息中提取目标框面尺寸;
36、从所述目标点云分布尺寸信息中提取点云分布面尺寸;
37、采用目标框面尺寸和所述点云分布面尺寸进行尺寸比例计算,生成所述点云尺寸比例信息。
38、可选的,所述采用所述点云尺寸比例信息,生成所述预测目标框对应的目标框质量信息,包括:
39、确定所述点云尺寸比例信息对应的预设尺寸比例区间,确定为目标尺寸区间;
40、获取所述目标尺寸区间对应的区间质量信息;
41、采用所述区间质量信息,生成所述目标框质量信息。
42、第二方面,本技术提供了一种激光雷达目标框的检测装置,包括:
43、特征提取模块,用于依据激光雷达采集到的点云信息进行特征提取,生成特征伪图像;
44、目标预测模块,用于采用所述特征伪图像进行目标预测,得到预测结果信息,所述预测结果信息包含预测目标框;
45、第一确定模块,用于基于所述预测结果信息和所述点云信息,确定目标点云信息,所述目标点云信息为所述预测目标框内的点云信息;
46、第二确定模块,用于依据所述目标点云信息和所述预测结果信息,确定点云尺寸比例信息,所述点云尺寸比例信息为所述预测目标框与所述目标点云信息之间的尺寸比例;
47、生成模块,用于采用所述点云尺寸比例信息,生成所述预测目标框对应的目标框质量信息。
48、第三方面,提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
49、存储器,用于存放计算机程序;
50、处理器,用于执行存储器上所存放的程序时,实现第一方面任一项所述的激光雷达目标框的检测方法。
51、第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述的激光雷达目标框的检测方法。
52、本技术实施例通过依据激光雷达采集到的点云信息进行特征提取,生成特征伪图像,采用特征伪图像进行目标预测,得到预测结果信息,预测结果信息包含预测目标框,以基于预测结果信息和点云信息,确定目标点云信息,目标点云信息为预测目标框内的点云信息,并依据目标点云信息和预测结果信息,确定点云尺寸比例信息,点云尺寸比例信息为预测目标框与目标点云信息之间的尺寸比例,随后采用点云尺寸比例信息,生成预测目标框对应的目标框质量信息;从而达到了对预测目标框进行质量检测的目的,解决了现有相关技术中由于深度学习算法输出结果的不可解释性所存在自动驾驶分析过程中无法对目标框进行质量评定的问题,能够有效确定出预测目标框对应的目标框质量,进而在自动驾驶中能够有效的评定目标框的质量。
- 还没有人留言评论。精彩留言会获得点赞!