车道中心线提取方法、装置、设备及存储介质与流程
本技术涉及电子地图,尤其涉及一种车道中心线提取方法、装置、设备及存储介质。
背景技术:
1、车道中心线为车道的中心位置连接形成的参考线,是电子地图(如高精地图)中重要的底层数据。通过车道中心线可以预估车道数、车道边界、车道连通关系等,为自动驾驶等提供经验数据,并为车道级导航提供了丰富的虚拟车道信息。
2、目前的车道中心线提取方案,主要通过图像分割、点云分割等人工智能(ai)技术手段识别车道标线、地面边缘等方式,但由于数据采集成本高昂,更新速度慢,尤其是在复杂路口需要采集多趟数据才能覆盖,导致车道中心线的提取效果难以满足实际需求。
技术实现思路
1、本技术提供一种车道中心线提取方法、装置、设备及存储介质,以至少解决上述技术问题之一。
2、根据本技术的一方面,提供一种车道中心线提取方法,包括:
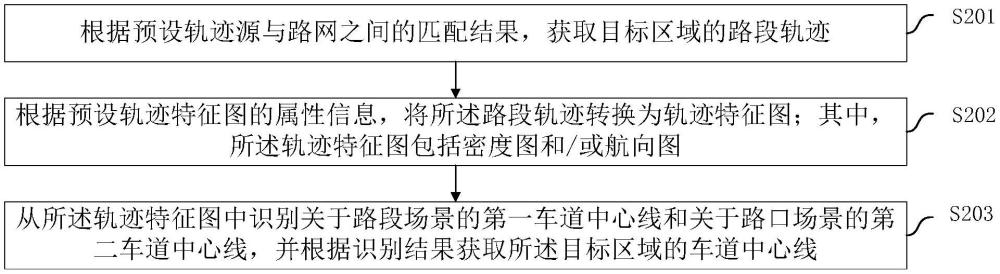
3、根据预设轨迹源与路网之间的匹配结果,获取目标区域的路段轨迹;
4、根据预设轨迹特征图的属性信息,将所述路段轨迹转换为轨迹特征图;其中,所述轨迹特征图包括密度图和/或航向图;
5、从所述轨迹特征图中识别关于路段场景的第一车道中心线和关于路口场景的第二车道中心线,并根据识别结果获取所述目标区域的车道中心线。
6、在一种实施方式中,所述方法还包括:
7、获取所述目标区域的路口连通关系组以及路段标记;其中,所述路口连通关系组包括如下路口连通关系至少之一:进入路口、经过路口和退出路口,所述路段标记用于标记每两个相邻路口之间的路段信息;
8、所述根据预设轨迹源与路网之间的匹配结果,获取目标区域的路段轨迹,包括:
9、根据所述路口连通关系组、所述路段标记和所述匹配结果,获取所述路段轨迹。
10、在一种实施方式中,所述匹配结果包括所述预设轨迹源中每条轨迹在路网上的对应位置;
11、所述根据预设轨迹源与路网之间的匹配结果,获取目标区域的路段轨迹,包括:
12、针对所述目标区域,根据所述路网和所述对应位置对每条轨迹进行打断处理,以得到所述目标区域的路段轨迹。
13、在一种实施方式中,所述预设轨迹源与路网之间的匹配结果的获取方式,包括:
14、获取实时动态测量rtk轨迹数据,并对所述rtk轨迹数据进行预处理,得到预设轨迹源;其中,所述预处理包括轨迹穿串处理和轨迹清洗处理;
15、将所述预设轨迹源中每条轨迹与路网进行匹配,以获取每条轨迹在路网中的对应位置,得到预设轨迹源与路网之间的匹配结果。
16、在一种实施方式中,所述属性信息包括高度和宽度,其根据预设的作业范围和像素分辨率确定得到;
17、所述根据预设轨迹特征图的属性信息,将所述路段轨迹转换为轨迹特征图,包括:
18、将所述路段轨迹映射到栅格化的图像中,以将所述路段轨迹对应的轨迹线转换为像素值,其中,任意两条相交的轨迹线的相交位置进行像素值累加;
19、根据所述高度和宽度对所述像素值进行拉伸处理,以得到所述密度图;
20、在一种实施方式中,所述根据预设轨迹特征图的属性信息,将所述路段轨迹转换为轨迹特征图,包括:
21、根据预设轨迹特征图的高度和宽度,确定初始航向图的尺寸;
22、计算确定所述路段轨迹对应轨迹线的航向值,并将所述航向值映射到所述初始航向图的像素位置中;
23、针对每个像素位置,对所述像素位置中的航向值进行排序,得到排序结果,并根据排序结果获取所述初始航向图中每个像素位置的航向值;
24、根据所述初始航向图中每个像素位置的航向值,得到所述航向图。
25、在一种实施方式中,所述轨迹线是相邻轨迹点之间相连得到的轨迹线;
26、所述计算确定所述路段轨迹对应轨迹线的航向值,包括:
27、根据所述相邻轨迹点之间的经度差和纬度差,计算所述相邻轨迹点之间的航向值,以得到所述轨迹路路段对应轨迹线的航向值。
28、在一种实施方式中,所述从所述轨迹特征图中识别路段场景中的第一车道中心线和路口场景中的第二车道中心线,包括:
29、将所述轨迹特征图输入至预训练的深度学习模型中进行处理,以从所述轨迹特征图中识别所述第一车道中心线和所述第二车道中心线,其中,所述深度学习模型是基于并基于样本密度图和/或样本航向图训练得到的模型,所述样本密度图和/或所述样本航向图中的车道中心线进行标注处理。
30、根据本技术的第二方面,提供一种车道中心线提取装置,包括:
31、轨迹获取模块,其设置为根据预设轨迹源与路网之间的匹配结果,获取目标区域的路段轨迹;
32、转换生成模块,其设置为根据预设轨迹特征图的属性信息,将所述路段轨迹转换为轨迹特征图;其中,所述轨迹特征图包括密度图和/或航向图;
33、识别及提取模块,其设置为从所述轨迹特征图中识别关于路段场景的第一车道中心线和关于路口场景的第二车道中心线,并根据识别结果获取所述目标区域的车道中心线。
34、在一种实施方式中,所述装置还包括:
35、路口关系获取模块,其设置为获取所述目标区域的路口连通关系组以及路段标记;其中,所述路口连通关系组包括如下路口连通关系至少之一:进入路口、经过路口和退出路口,所述路段标记用于标记每两个相邻路口之间的路段信息;
36、所述轨迹获取模块,具体设置为根据所述路口连通关系组、所述路段标记和所述匹配结果,获取所述路段轨迹。
37、在一种实施方式中,所述匹配结果包括所述预设轨迹源中每条轨迹在路网上的对应位置;
38、所述轨迹获取模块,具体设置为针对所述目标区域,根据所述路网和所述对应位置对每条轨迹进行打断处理,以得到所述目标区域的路段轨迹。
39、在一种实施方式中,还包括:
40、rtk数据获取模块,其设置为获取实时动态测量rtk轨迹数据,并对所述rtk轨迹数据进行预处理,得到预设轨迹源;其中,所述预处理包括轨迹穿串处理和轨迹清洗处理;
41、匹配模块,其设置为将所述预设轨迹源中每条轨迹与路网进行匹配,以获取每条轨迹在路网中的对应位置,得到预设轨迹源与路网之间的匹配结果。
42、在一种实施方式中,所述属性信息包括高度和宽度,其根据预设的作业范围和像素分辨率确定得到;
43、所述转换生成模块,包括:
44、转换单元,其设置为将所述路段轨迹映射到栅格化的图像中,以将所述路段轨迹对应的轨迹线转换为像素值,其中,任意两条相交的轨迹线的相交位置进行像素值累加;
45、拉伸单元,其设置为根据所述高度和宽度对所述像素值进行拉伸处理,以得到所述密度图;
46、在一种实施方式中,所述转换生成模块,包括:
47、尺寸确定单元,其设置为根据预设轨迹特征图的高度和宽度,确定初始航向图的尺寸;
48、航向值确定单元,其设置为计算确定所述路段轨迹对应轨迹线的航向值,并将所述航向值映射到所述初始航向图的像素位置中;
49、排序单元,其设置为针对每个像素位置,对所述像素位置中的航向值进行排序,得到排序结果,并根据排序结果获取所述初始航向图中每个像素位置的航向值;
50、获取单元,其设置为根据所述初始航向图中每个像素位置的航向值,得到所述航向图。
51、在一种实施方式中,所述轨迹线是相邻轨迹点之间相连得到的轨迹线;
52、所述航向值确定单元,具体设置为根据所述相邻轨迹点之间的经度差和纬度差,计算所述相邻轨迹点之间的航向值,以得到所述轨迹路路段对应轨迹线的航向值。
53、在一种实施方式中,所述识别及提取模块,具体设置为将所述轨迹特征图输入至预训练的深度学习模型中进行处理,以从所述轨迹特征图中识别所述第一车道中心线和所述第二车道中心线,其中,所述深度学习模型是基于并基于样本密度图和/或样本航向图训练得到的模型,所述样本密度图和/或所述样本航向图中的车道中心线进行标注处理。
54、根据本技术的第三方面,提供一种计算机设备,所述计算机设备包括存储器和处理器;所述存储器存储计算机执行指令;所述处理器执行所述存储器存储的计算机执行指令,使得所述计算机设备执行上述第一方面任一项提供的车道中心线提取方法。
55、根据本技术的第四方面,提供一种计算机可读存储介质,所述存储介质包括计算机执行指令,所述计算机执行指令被处理器执行时用于实现上述第一方面任一项提供的车道中心线提取方法。
56、根据本技术的第五方面,提供一种计算机程序产品,所述计算机程序产品包括计算机程序,该计算机程序被处理器执行时实现如上述第一方面任一项提供的车道中心线提取方法。
57、本技术提供的车道中心线提取方法、装置、设备及存储介质,通过根据预设轨迹源与路网之间的匹配结果,获取目标区域的路段轨迹,根据预设轨迹特征图的属性信息,将该路段轨迹转换为轨迹特征图,该轨迹特征图图包括密度图和/或航向图,从该轨迹特征图中识别关于路段场景的第一车道中心线和关于路口场景的第二车道中心线,并根据识别结果获取该目标区域的车道中心线。此过程中,替代相关技术中轨迹聚类的方式提取车道中心线,通过渲染轨迹特征图,并从轨迹特征图中识别路段场景的道路中心线以及路口场景的道路中心线,根据不同场景的识别结果提取最终的道路中心线,可以提高车道中心线的提取精度,为智能驾驶安全提供数据支撑。
- 还没有人留言评论。精彩留言会获得点赞!