基于三维结构的轨道监测数据处理方法、设备及存储介质与流程
本发明属于轨道交通隧道结构变形监测领域,具体涉及一种基于三维结构的轨道监测数据处理方法、设备及存储介质。
背景技术:
1、随着城市化进程的不断推进,轨道交通隧道工程得到越来越多的重视。轨道交通隧道建设是一项耗时长、工作量大的工程,具有造价高、人流量大的特点。近年来,轨道交通隧道安全事故时有发生。倘若发生事故,会造成重大的经济损失和人员伤亡。因此,对轨道交通开展实时连续变形监测具有重大意义。
2、目前常用的轨道交通隧道结构变形监测手段是:通过测量机器人实时测量位于隧道结构上监测点的角度和距离值,计算监测点三维坐标变形值;每期测量计算的监测点三维变形值与预先制定的变形值阈值比较,当变形值超出阈值及时报警,以此来避免安全事故的发生。
3、但是由于轨道交通隧道内环境复杂,测量机器人作为光学仪器,其角度、距离观测受大气折光、大气湍流以及运行列车遮挡等各种影响可能存在异常。而上述异常如果被当作变形发出误报警,会导致不必要的紧急响应、资源浪费,甚至可能引起公众恐慌,因此需要在对轨道交通隧道结构监测数据进行处理时充分利用相关信息,提高监测结果的可靠性,最大限度地减少误报警的发生,从而提高轨道交通监测系统的效率和安全性。
技术实现思路
1、基于上述问题,本发明提供了基于三维结构的轨道监测数据处理方法、设备及存储介质,以实现可在轨道交通隧道结构变形监测数据处理中提高监测结果的可靠性,提高轨道交通监测系统的效率和安全性,有利于轨道交通隧道监测数据决策处理工作的顺利推进。
2、一方面,本发明提供了一种基于三维结构的轨道监测数据处理方法,方法包括如下步骤:
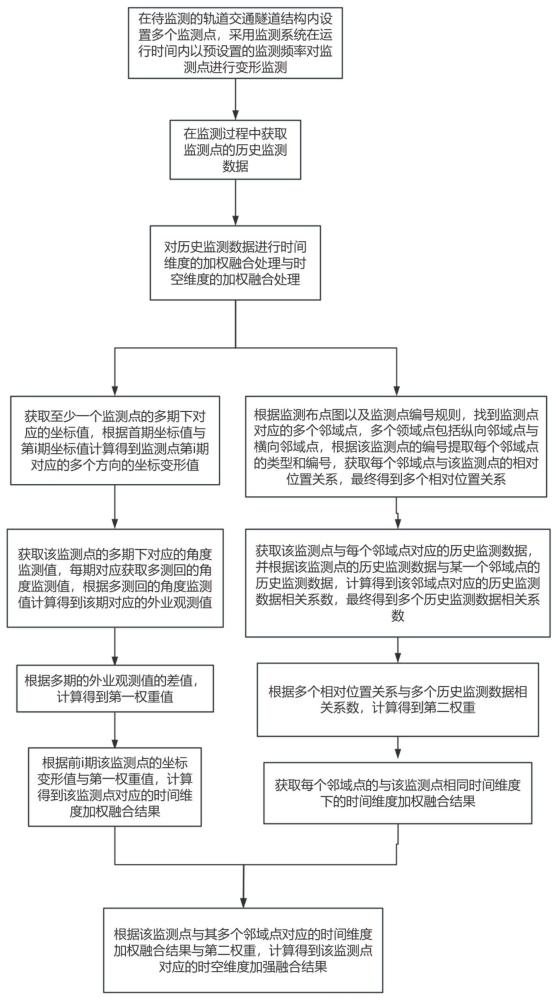
3、在待监测的轨道交通隧道结构内设置多个监测点,采用监测系统在运行时间内以预设置的监测频率对监测点进行变形监测;
4、在监测过程中获取监测点的历史监测数据;
5、对历史监测数据进行时间维度的加权融合处理与时空维度的加权融合处理;
6、其中,对历史监测数据进行时间维度的加权融合处理,其中时间维度根据预设置时间点划分标识为一期,多个时间维度为多期,包括如下步骤:
7、获取至少一个监测点的多期下对应的坐标值,根据首期坐标值与第i期坐标值计算得到监测点第i期对应的多个方向的坐标变形值,其中首期为第一个时间点,i为正整数;
8、获取该监测点的多期下对应的角度监测值,每期对应获取多测回的角度监测值,根据多测回的角度监测值计算得到该期对应的外业观测值;
9、根据多期的外业观测值的差值,计算得到第一权重值;
10、根据前i期该监测点的坐标变形值与第一权重值,计算得到该监测点对应的时间维度加权融合结果;
11、对历史监测数据进行时空维度的加权融合处理,包括如下步骤:
12、根据监测布点图以及监测点编号规则,找到监测点对应的多个邻域点,多个领域点包括纵向邻域点与横向邻域点,根据该监测点的编号提取每个邻域点的类型和编号,获取每个邻域点与该监测点的相对位置关系,最终得到多个相对位置关系;
13、获取该监测点与每个邻域点对应的历史监测数据,并根据该监测点的历史监测数据与某一个邻域点的历史监测数据,计算得到该邻域点对应的历史监测数据相关系数,最终得到多个历史监测数据相关系数;
14、根据多个相对位置关系与多个历史监测数据相关系数,计算得到第二权重;
15、获取每个邻域点的与该监测点相同时间维度下的时间维度加权融合结果;
16、根据该监测点与其多个邻域点对应的时间维度加权融合结果与第二权重,计算得到该监测点对应的时空维度加权融合结果。
17、进一步地,多个监测点分布于待监测的轨道交通隧道结构的多个监测断面,且至少位于监测断面的隧道顶部、隧道两侧侧墙、隧道底部。
18、进一步地,采用全站仪进行多测回的边角测量,并计算得到监测点的首期坐标值与第i期坐标值;
19、采用标识监测点的第i期坐标值,标识监测点的首期坐标值,根据首期坐标值与第i期坐标值计算得到监测点第i期对应的坐标变形值,表达式如下:
20、,
21、其中表示监测点第i期时分别在x、y、z三个方向的坐标变形值。
22、进一步地,角度监测值包括盘左水平角监测值、盘右水平角监测值、盘左垂直角监测值、盘右垂直角监测值;
23、外业观测值包括2c值偏差、水平夹角中误差值、竖盘指标差偏差、垂直角中误差值;
24、2c值由历史监测数据的水平角监测值计算得到,表达式为:
25、;
26、2c值偏差为第i期2c值均值与其前n期2c值均值之差,记作;
27、水平夹角为监测点与起始基准点之间的夹角在水平面上的投影,每期的水平夹角由每测回的水平角监测值计算,表达式为:
28、
29、其中,为监测点第i期第j测回的水平夹角,为监测点第i期第j测回的盘左水平角监测值与盘右水平角监测值的平均值,为起始基准点第i期第j测回的盘左水平角监测值与盘右水平角监测值的平均值,其中j为正整数;
30、水平夹角中误差值为每期监测得到的共j测回的水平夹角所计算得到的中误差值,记作;
31、竖盘指标差由历史监测数据的垂直角监测值计算,表达式为:
32、;
33、竖盘指标差偏差为第i期竖盘指标差均值与其前n期竖盘指标差均值之差,记作;
34、垂直角中误差值为每期监测的共j测回的盘左水平角监测值与盘右水平角监测值的平均值的中误差值,记作;
35、第一权重的表达式为:
36、;
37、;
38、其中,a为第一权重的开始计算期次与第i期之间的期次之差;分别为监测点第i期在x方向坐标变形值的权重、y方向坐标变形值的权重、z方向坐标变形值的权重,i为正整数。
39、进一步地,时间维度加权融合结果通过对轨道交通隧道结构变形趋势的先验判断,选择监测点前n期的变形值与第i期的变形值进行加权融合,计算方式如下:
40、;
41、其中分别表示为x方向、y方向、z方向上的时间维度融合处理结果,为监测点第i期以及其前n期x方向坐标变形值的权重;分别为监测点第i期以及其前n期y方向坐标变形值的权重;分别为监测点第i期以及其前n期z方向坐标变形值的权重;分别为监测点第i期以及其前n期x方向的坐标变形值;分别为监测点第i期以及其前n期y方向的坐标变形值;分别为监测点第i期以及其前n期z方向的坐标变形值,i为正整数。
42、进一步地,监测点编号规则为监测点的编号中至少包括断面编号及监测点编号,其中监测点编号代表监测点在断面上所处的位置;
43、根据该监测点的编号提取每个邻域点的编号,包括:
44、通过对比历史监测数据和监测布点图找出该监测点的断面编号及监测点编号;
45、将断面编号加减序数得到该监测点的同纵断面邻域点的编号;
46、固定断面编号不变,将监测点编号加减序数得到该监测点的同横断面邻域点的编号。
47、进一步地,某个监测点与对应的多个邻域点的相对位置关系包括:该监测点与同横断面的多个邻域点的距离,以及该监测点与同纵断面的多个邻域点的距离,表达式为:
48、,
49、其中,分别表示监测点a和邻域点b各自的坐标值,表示监测点a与邻域点b之间的距离;
50、监测点a与邻域点b的历史监测数据的相关系数表达式为:
51、;
52、其中为邻域点b与监测点a的历史监测数据分别在x、y、z方向的相关系数,分别为监测点a在第i期在x、y、z方向的坐标变形值,分别为监测点a第1至m期在x、y、z方向的历史坐标变形值的均值,分别为邻域点b在x、y、z方向第i期的坐标变形值,分别为邻域点b第1至m期在x、y、z方向的历史坐标变形值的均值,m为正整数。
53、邻域点在x、y、z方向坐标变形值的权重表达式为:
54、;
55、其中为邻域点b的权重初值,由邻域点类型决定;为邻域点b至监测点a的距离,为邻域点b与监测点a的历史监测数据分别在x、y、z方向的相关系数。
56、进一步地,时空维度的加权融合处理的表达式为:
57、;
58、其中为监测点a在第i期的时空维度加权融合结果;,为监测点a在x、y、z方向坐标变形值的权重;分别为m个邻域点b在x方向坐标变形值的权重;分别为m个邻域点b在y方向坐标变形值的权重;分别为m个邻域点b在z方向坐标变形值的权重;分别为m个邻域点b第i期在x方向坐标变形值的时间维度加权融合结果;分别为m个邻域点b第i期在y方向坐标变形值的时间维度加权融合结果;分别为m个邻域点b第i期在z方向坐标变形值的时间维度加权融合结果。
59、第二方面,提供了一种电子设备,电子设备包括:
60、至少一个处理器;以及,
61、与至少一个处理器通信连接的存储器;其中,
62、存储器存储有可被至少一个处理器执行的计算机程序,计算机程序被至少一个处理器执行,以使至少一个处理器能够执行基于三维结构的轨道监测数据处理方法。
63、第三方面,提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机指令,计算机指令用于使处理器执行基于三维结构的轨道监测数据处理方法。
64、与现有技术相比,本发明的有益效果在于:
65、本发明根据变形发生、发展的时空相关性,充分挖掘轨道交通隧道结构变形监测数据的时间和时空相关信息;以监测信息的时间跨度和监测数据质量确定权重,实现监测数据时间维度的融合处理;以监测点之间的时空分布、结构相关性以及历史变形相关系数确定权重,实现监测数据时空维度的融合处理;最后得到顾及时空相关性的轨道交通隧道结构监测数据处理结果。
66、本发明方法可以在轨道交通隧道结构变形监测数据处理中提高监测结果的可靠性,从而提高轨道交通监测系统的效率和安全性,有利于轨道交通隧道监测数据决策处理工作的顺利推进。
- 还没有人留言评论。精彩留言会获得点赞!