一种基于时序数据增强的充电桩故障预测方法与流程
本发明属于充电桩,具体涉及一种基于时序数据增强的充电桩故障预测方法。
背景技术:
1、随着电动汽车的广泛使用,充电桩作为智能电网的关键设施,其稳定性和可靠性对于保障电力供应和推动绿色出行具有重要意义。然而,充电桩在实际运行中可能会遇到各种故障,这些故障若未被及时发现和处理,将严重影响充电服务的质量和效率,甚至可能对电网造成不利影响。
2、在现有的充电桩故障预测技术中,由于故障数据相对于正常运行数据来说较为稀缺,导致正负样本之间存在不平衡的问题。这种不平衡问题使得故障预测模型在训练过程中容易偏向于多数类(即正常运行数据),从而降低了模型对故障模式的识别能力。因此,亟需一种充电桩数据处理方式来解决样本不平衡问题,以提高充电桩故障预测的准确性。
技术实现思路
1、为了解决上述现有技术中存在的问题,提供了一种基于时序数据增强的充电桩故障预测方法。
2、本发明解决其技术问题所采用的技术方案是:
3、本技术方案提出了一种基于时序数据增强的充电桩故障预测方法,包括以下步骤:
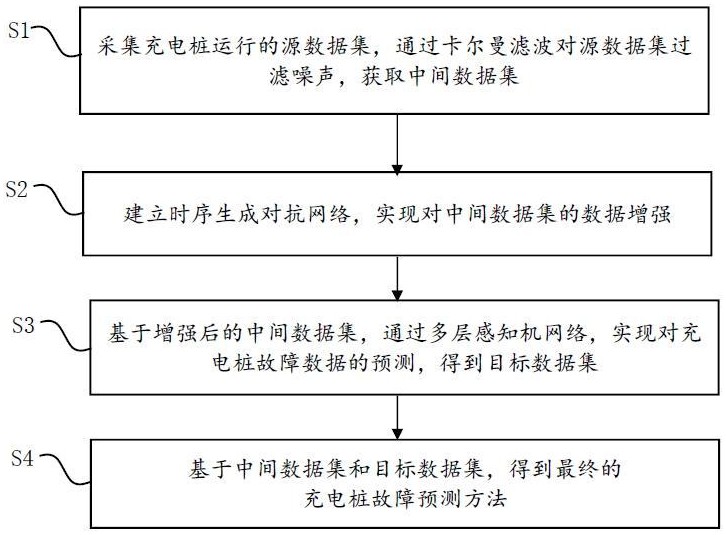
4、s1:采集充电桩运行的源数据集,通过卡尔曼滤波对源数据集过滤噪声,获取中间数据集;
5、s2:建立时序生成对抗网络,实现对中间数据集的数据增强;
6、s3:基于增强后的中间数据集,通过多层感知机网络,实现对充电桩故障数据的预测,得到目标数据集;
7、s4:基于中间数据集和目标数据集,得到最终的充电桩故障预测方法。
8、优选的,所述s1中,过滤噪声的方法包括以下步骤:
9、s11:根据当前状态向量预测下一时间的状态向量,公式如下:
10、 (1);
11、式中,表示时间步 k的信息下对时间步 k+1的状态预测,表示当前时间步 k的状态向量,表示状态转移矩阵,表示过程噪声;
12、s12:根据当前估计误差协方差矩阵,预测下一时间步的估计误差协方差矩阵,公式如下:
13、 (2);
14、式中,表示时间步 k的信息下对时间步 k+1的误差协方差矩阵预测,表示当前时间步 k的估计误差协方差矩阵,表示状态转移矩阵,表示过程噪声协方差;
15、s13:通过观测矩阵和观测噪声协方差计算卡尔曼增益,公式如下:
16、 (3);
17、式中,表示时间步 k的卡尔曼增益, h表示观测矩阵,表示观测噪声协方差;
18、s14:根据当前状态向量和估计误差协方差,利用卡尔曼增益进行更新,获取准确的状态估计,去除信号中的噪声成分,公式如下:
19、 (4);
20、式中,表示更新后的状态向量,表示更新前的状态向量,表示卡尔曼增益,表示时间步 k的观测数据, h表示观测矩阵,表示更新后的估计误差协方差矩阵,表示更新前的估计误差协方差矩阵, i表示单位矩阵。
21、优选的,所述s2中,数据增强的方法包括以下步骤:
22、s21:基于门控循环单元建立时序生成对抗网络,门控循环单元利用更新门和重置门来提取和学习数据特征,更新门控制上一时间步信息的保留,重置门对过去信息选择性的遗忘,保留重要信息,公式如下:
23、 (5);
24、式中,表示当前时间步 t的输入特征向量,表示上一时间步 t-1的隐藏状态,表示时间步 t更新门的输出,表示时间步 t重置门的输出,表示时间步 t的候选隐藏状态,表示时间步 t的最终隐藏状态;
25、表示更新门、遗忘门、候选隐藏状态的权重和偏置,、表示sigmoid激活函数和tanh激活函数;
26、s22:基于自动编码组件,实现对数据特征的自动编码解码,自动编码组件包含嵌入函数和恢复函数,公式如下:
27、 (6);
28、式中,表示当前时间步 t的输入特征向量,表示输入经过嵌入函数后的嵌入向量,表示嵌入向量经过恢复函数后的特征向量,表示嵌入向量映射到监督空间的中间状态向量,用于后续的监督训练,表示相应的门控循环单元;
29、s23:对抗生成组件由生成器和判别器组成,生成器公式如下:
30、 (7);
31、式中,表示当前时间步 t的输入随机高斯噪声,表示生成器生成的隐藏状态,表示隐藏状态映射到监督空间的表示,表示隐藏状态经过恢复函数后的向量,表示相应的门控循环单元;
32、判别器公式如下:
33、 (8);
34、式中,表示生成器经噪声输入后生成的隐藏状态,表示隐藏状态映射到监督空间的表示,表示输入数据经嵌入函数后的嵌入向量,表示相应输入后判别器的判别结果,表示相应的门控循环单元;
35、s24:模型通过优化算法最小化损失进行训练,在时序生成对抗网络中,包括有三个损失函数,损失函数公式如下:
36、 (9);
37、式中,表示判别器判别结果的交叉熵损失, n表示样本数,表示相应输入后判别器的判别结果,γ为权重参数,表示生成器的损失,包含和;
38、其中,计算输入的嵌入向量与其映射到监督空间的中间向量之间的差别,计算输入与生成器输出经恢复函数后的特征向量之间的差别,与分别代表方差计算、均值计算, v为参数;
39、表示有监督学习的损失,计算输入与恢复函数后的特征向量的差别,以及嵌入向量与监督空间的中间向量之间的差别。
40、优选的,所述s3中,数据预测的方法包括以下步骤:
41、s31:多层感知机结构包括输入层、隐藏层、输出层,公式如下:
42、 (10);
43、式中,是神经元 j的激活,是连接输入 i和隐藏神经元 j的权重,是输入信号,是隐藏层的偏置项, n是输入层的神经元数量;
44、是输出层的激活,是连接隐藏神经元 j和输出神经元 k的权重,是输出层偏置项, m是隐藏层的神经元数量,表示sigmoid激活函数。
45、优选的,所述s4中,充电桩故障预测方法包括以下步骤:
46、s41:数据集合并,公式如下:
47、 (11);
48、式中, x1到 xn表示n个源数据集经过卡尔曼滤波后得到的中间数据集, g1到 gn表示经过数据增强的中间数据集, t1到 tn表示数据集合并后的输入数据;
49、s42:基于s41的数据,将其输入到多层感知机网络进行模型训练,进行充电桩故障预测,公式如下:
50、 (12);
51、式中,l表示多层感知机输出与真实值之间的差异,通过最小化损失实现对充电桩故障预测。
52、与现有技术相比,本发明具有以下优点:
53、本技术将数据增强技术应用于时序数据分析中,研究数据挖掘方法以及数据增强技术在充电桩故障预测问题中的应用,并给出了基于时序数据增强的充电桩故障预测方法,解决了故障样本稀缺的问题,增强了模型的泛化能力,使得故障预测更加精准,为智能电网的稳定运行和电动汽车的普及提供了强有力的技术支撑,推动了智能充电技术的创新和清洁能源的高效利用,可有效提高充电桩的运行稳定性和故障检测的准确性,对智能充电网络的可靠性和安全性具有重要意义。
54、本技术可有效缓解充电桩故障样本不足的问题,提升充电桩故障预测的准确性,可为智能电网系统提前预判充电桩可能出现的故障,有助于电网运营商及时采取措施,确保充电服务的连续性和可靠性,可帮助充电桩运营商优化维护计划,减少意外停机时间,提高充电设备的利用率和服务质量,有助于实现充电桩与其他能源管理系统的协同优化,提升整体能源利用效率。
- 还没有人留言评论。精彩留言会获得点赞!