一种基于语义分割的皮带撕裂检测方法及系统与流程
本发明涉及皮带撕裂检测,具体是一种基于语义分割的皮带撕裂检测方法及系统。
背景技术:
1、如今,分割技术的运用越来越广泛,对于想要得到的物体轮廓,通过分割技术,可以将其具体的轮廓精准的分割出来。在检测皮带是否有撕裂的项目中,首先将皮带上的激光线通过分割技术分割出来,然后通过判断分割出来的激光线上是否有因皮带撕裂而造成的凸起,从而达到检测皮带是否有撕裂的目的。有现有技术公开了通过采用编解码神经网络对采集的激光线图片进行语义分割,从而实现皮带上的激光线的分割,但是,在该方法中,当采集到的激光线图片的分辨率比较大时,需要编解码神经网络分割处理的耗时就会过长,无法做到实时对皮带撕裂进行检测,这样会出现还没有将皮带的撕裂点检测出来,皮带在转动的过程中,其上的皮带撕裂点就已经流走的情况,这样会出现非常大的漏检现象。
技术实现思路
1、针对上述缺陷,本发明提出了一种基于语义分割的皮带撕裂检测方法及系统,目的在于解决现有的通过采用编解码神经网络对采集的激光线图片进行语义分割的方法中,当采集到的激光线图片的分辨率比较大时,需要编解码神经网络分割处理的耗时就会过长,无法做到实时对皮带撕裂进行检测,从而导致出现漏检的问题。
2、为达此目的,本发明采用以下技术方案:
3、一种基于语义分割的皮带撕裂检测方法,包括以下步骤:
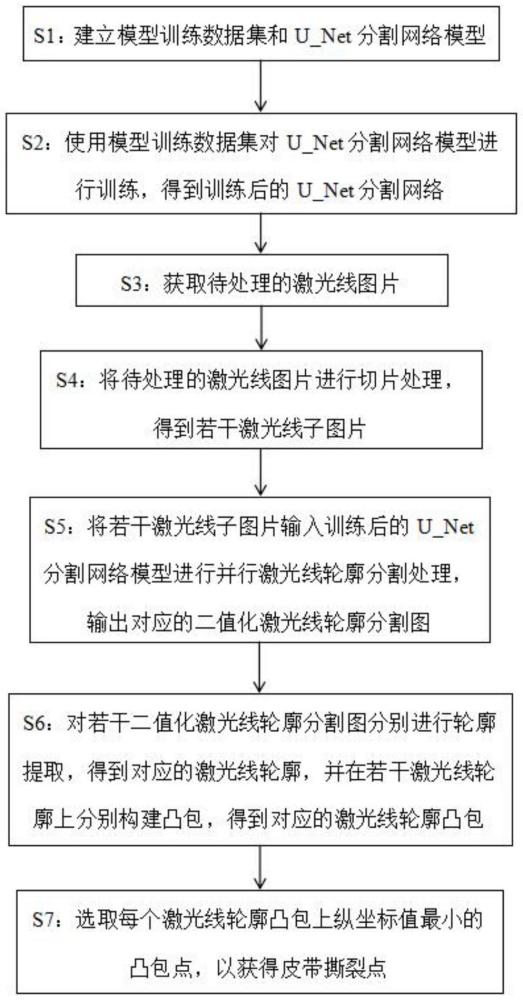
4、步骤s1:建立模型训练数据集和u_net分割网络模型;
5、步骤s2:使用模型训练数据集对u_net分割网络模型进行训练,得到训练后的u_net分割网络;
6、步骤s3:获取待处理的激光线图片;
7、步骤s4:将待处理的激光线图片进行切片处理,得到若干激光线子图片;
8、步骤s5:将若干激光线子图片输入训练后的u_net分割网络模型进行并行激光线轮廓分割处理,输出对应的二值化激光线轮廓分割图;
9、步骤s6:对若干二值化激光线轮廓分割图分别进行轮廓提取,得到对应的激光线轮廓,并在若干激光线轮廓上分别构建凸包,得到对应的激光线轮廓凸包;
10、步骤s7:选取每个激光线轮廓凸包上纵坐标值最小的凸包点,以获得皮带撕裂点。
11、优选地,在步骤s1中,建立模型训练数据集,具体包括以下子步骤:
12、步骤s11:采集400~600张激光线图片以及建立一个空白文件;
13、步骤s12:使用标注工具标注每张激光线图片中激光线的位置和类别名;
14、步骤s13:对每张激光线图片创建一个json文件;
15、步骤s14:将每张激光线图片中激光线的位置和类别名储存于对应激光线图片的json文件;
16、步骤s15:将400~600张激光线图片以及每张激光线图片的json文件储存于空白文件,以完成模型训练数据集的建立。
17、优选地,在步骤s6中,对二值化激光线轮廓分割图进行轮廓提取,具体包括以下子步骤:
18、步骤s61:采用opencv的轮廓提取函数fingcontours()提取二值化激光线轮廓分割图中的激光线轮廓集合conts={c1,c2,ci,…,cn};
19、其中,ci表示第i个激光线轮廓,ci={topxi,topyi,bottomxi,bottomyi,si},topxi表示第i个位置矩形框的左上角横坐标,topyi表示第i个位置矩形框的左上角纵坐标,bottomxi表示第i个位置矩形框的右下角横坐标,bottomyi表示第i个位置矩形框的右下角纵坐标,si表示第i个位置矩形框的面积;n表示二值化激光线轮廓分割图中所有激光线轮廓的数目;
20、步骤s62:选取二值化激光线轮廓分割图中的激光线轮廓集合conts中面积最大的激光线轮廓作为二值化激光线轮廓分割图对应的激光线轮廓。
21、优选地,在步骤s6中,在激光线轮廓上构建凸包,得到激光线轮廓凸包,具体包括以下子步骤:在激光线轮廓上通过opencv的凸包函数convexhull()计算得到激光线轮廓的凸包坐标点点集。
22、本技术的另一方面提供了一种基于语义分割的皮带撕裂检测系统,所述系统包括:
23、第一建立模块,用于建立模型训练数据集;
24、第二建立模块,用于建立u net分割网络模型;
25、模型训练模块,用于使用模型训练数据集对u net分割网络模型进行训练,得到训练后的u net分割网络;
26、获取模块,用于获取待处理的激光线图片;
27、图片切片模块,用于将待处理的激光线图片进行切片处理,得到若干激光线子图片;
28、输入模块,用于将若干激光线子图片输入训练后的u_net分割网络模型进行并行激光线轮廓分割处理;
29、输出模块,用于输出对应的二值化激光线轮廓分割图;
30、轮廓提取模块,用于对若干二值化激光线轮廓分割图分别进行轮廓提取,得到对应的激光线轮廓;
31、构建模块,用于在若干激光线轮廓上分别构建凸包,得到对应的激光线轮廓凸包;
32、选取模块,用于选取每个激光线轮廓凸包上纵坐标值最小的凸包点,以获得皮带撕裂点。
33、优选地,所述第一建立模块包括:
34、采集子模块,用于采集400~600张激光线图片;
35、建立子模块,用于建立一个空白文件;
36、标注子模块,用于使用标注工具标注每张激光线图片中激光线的位置和类别名;
37、创建子模块,用于对每张激光线图片创建一个json文件;
38、第一储存子模块,用于将每张激光线图片中激光线的位置和类别名储存于对应激光线图片的json文件;
39、第二储存子模块,用于将400~600张激光线图片以及每张激光线图片的json文件储存于空白文件,以完成模型训练数据集的建立。
40、优选地,所述轮廓提取模块包括:
41、提取子模块,用于采用opencv的轮廓提取函数fingcontours()提取二值化激光线轮廓分割图中的激光线轮廓集合conts={c1,c2,ci,…,cn};
42、其中,ci表示第i个激光线轮廓,ci={topxi,topyi,bottomxi,bottomyi,si},topxi表示第i个位置矩形框的左上角横坐标,topyi表示第i个位置矩形框的左上角纵坐标,bottomxi表示第i个位置矩形框的右下角横坐标,bottomyi表示第i个位置矩形框的右下角纵坐标,si表示第i个位置矩形框的面积;n表示二值化激光线轮廓分割图中所有激光线轮廓的数目;
43、选取子模块,用于选取二值化激光线轮廓分割图中的激光线轮廓集合conts中面积最大的激光线轮廓作为二值化激光线轮廓分割图对应的激光线轮廓。
44、优选地,所述构建模块包括:
45、计算子模块,用于在激光线轮廓上通过opencv的凸包函数convexhull()计算得到激光线轮廓的凸包坐标点点集。
46、本技术实施例提供的技术方案可以包括以下有益效果:
47、本方案通过将采集到激光线图片切片成若干激光线子图片,并使用训练后的unet分割网络模型对所有激光线子图片进行并行激光线轮廓分割处理,得到每张激光线子图片对应的激光线轮廓分割图。本方案相比于传统的使用编解码神经网络对一整张激光线图片进行激光线分割处理,能够提高分割图片中激光线轮廓的时效性,从而实现实时对皮带撕裂进行检测,避免对皮带的撕裂点出现漏检的情况。
- 还没有人留言评论。精彩留言会获得点赞!