基于异质光场协同的复杂环境水位监测系统及方法
本发明属于水位检测,更进一步涉及一种基于异质光场协同的复杂环境水位监测系统及方法。本发明可用于河道、水库或海岸的水位实时监测,为制定抗旱防洪对策等提供精确数据。
背景技术:
1、水位的实时监测,可为制定抗旱防洪对策、河流治理规划、水库调度、水资源管理等提供重要依据。现有的水位监测装置有两种:接触式和非接触式,都存在一定程度上的限制,如接触式的浮子式水位计需要静水装置;非接触式的超声波、雷达水位计,需要定期校准且安装要求高,图像处理方法的安装要求低,但在复杂环境下效果较差。使用图像识别方法进行水位检测的一般流程为:水尺分割、倾斜校正、水位线定位、切割字符、ocr检测、水位计算。在较理想的条件下,该方法表现良好,然而自然水域采集到图像复杂多样的,许多方案忽略了曝光异常、雨、雪、雾、遮挡等问题。但这在实际应用中是不可避免的,而且会导致图像出现不同种类、不同程度的退化,进一步导致这些方案在恶劣环境下难以得出较准确的数据,无法投入实际应用。针对上述问题,本发明提出了基于异质光场协同的复杂环境水位监测系统及方法,该水位监测系统根据激光雷达对金属、水等不同材料介质的反射特性,构建基于雷达激光场和可见光场协同处理机制,可弥补仅使用图像处理进行水位检测的不足。
2、重庆知行数联智能科技有限责任公司在其申请的专利文献“一种基于深度学习的无水尺河道水位检测方法”(专利申请号cn202311379848.5,申请公布号cn117974962a)中公开了一种基于深度学习的无水尺河道水位检测方法。该方法的实现步骤是:(1)在水位检测点设定标定物并从摄像头中获取包含标定物的图像,通过标定得到像素坐标系和世界坐标系的映射关系;(2)利用sam模型对目标水域的水体区域和非水体区域进行分割,并获取二值图像;(3)在二值图像上裁剪出水位标定处的邻域,通过图像处理获取图像上的水位分割线;(4)将拉流获取的单帧图像二值化,获取水位所在附近的感兴趣区域,将感兴趣区域划分为多个子感兴趣区域,计算laplace值;(5)对比子感兴趣区域,确定laplace值突变的区域,该区域拟为水位线区域;(6)通过对比步骤三和步骤五,确定水位线位置,通过映射关系计算得到水位高度。该方法可以使用标定物代替水尺,经过标定得到像素坐标系和世界坐标系的映射关系,一定程度上解决了对物理水尺的依赖性,可以实现在标定物被遮挡时的水位检测。但是,该方法仍然存在三个以下不足之处:其一,标定物的尺寸需要已知,而且不能移动相机,相机位置、角度变化后需要重新校准;其二,当存在较大体积的漂浮物或附着物时,识别出的水位线会发生下移,导致检测值低于真实值;其三,未考虑天气对检测过程的影响,忽略了曝光异常、雨、雪、雾等情况导致的图像退化对检测准确率的影响。
3、zhifeng xie等人在其发表的论文“application of deep learning techniquesin water level measurement:combining improved segformer-unet model withvirtual water gauge”(applied sciences 2023.5.02)中提出一种使用虚拟水尺的水位检测方法。该方法的实现步骤为:(1)选择透视变换需要的匹配投影点,计算出虚拟水尺的透视矩阵;(2)使用改进segformer-une分割网络精确分割图像中的水体和背景;(3)根据它们的边界使用canny边缘检测算法确定水位线;(4)使用透视变换矩阵将水位线从像素坐标系变换到虚拟水尺坐标系,从而得到最终的水位值。该方法通过将真实水尺坐标系映射到虚拟水尺坐标系,提高了水位检测的准确率,而且能适应一些恶劣场景,如黑夜、水尺脏污甚至水尺丢失。但是,该方法仍然存在以下三个不足之处:第一,每次安装虚拟水尺都需要人工选择匹配投影点,用于计算透视矩阵,而且不能移动相机,相机位置、角度变化后需要重新校准;第二,大体积的漂浮物会影响水位线的分割,使得水位线的划分大幅度偏离真实值;第三,未完全考虑天气对检测过程的影响,忽略了雨、雾等情况对检测效果的影响,当雨、雪、雾使图像信息模糊时,该方法对水位进行检测的准确率较低。
技术实现思路
1、本发明的目的是针对上述现有技术存在的不足,提出一种基于异质光场协同的水位监测系统及方法,用于解决现有技术相机位置、角度变化后需要重新校准;未考虑曝光异常、雨、雪、雾情况对检测效果的影响;以及大体积的漂浮物会影响水位线的分割,使得水位线的划分大幅度偏离真实值的不足。
2、实现本发明目的的技术思路是,本发明系统中的点云roi定位模块,通过聚类提取水尺点云、根据水尺点云及联合外参分割出水尺图像的方法替代现有技术在分割水尺图像时所采用的手动选择和图像目标检测的方法,解决了现有技术手动选择水尺图像,相机位置、角度变化后需要重新校准,图像目标检测鲁棒性差的问题。本发明的方法,增加了对水尺图像进行曝光校正及雨、雪、雾去除操作的图像增强补充了现有技术缺少的对曝光异常、雨、雪、雾情况的处理。本发明的方法,利用激光雷达点强度在水、金属、遮挡物上表现出的差异性,对水尺点云做强度累计再根据最大梯度法得到水位线,替代现有技术在定位水位线时所采用的图像分割方法,解决了现有技术易受倒影、漂浮物影响导致水位线偏离真实值的问题。
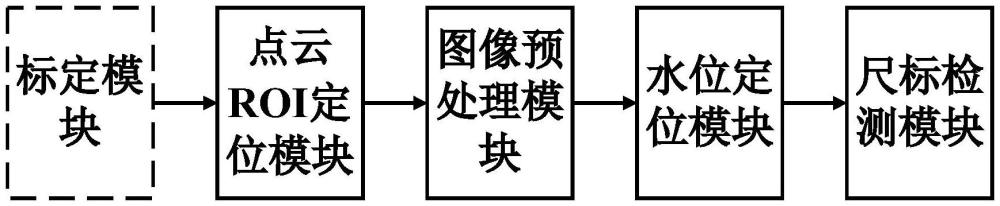
3、本发明的系统,包括标定模块、图像预处理模块、点云roi定位模块、水位定位模块、尺标检测模块。其中,
4、所述标定模块,用于对相机、激光雷达进行标定;
5、所述点云roi定位模块,用于通过聚类提取水尺点云,根据水尺点云及联合外参分割出水尺图像;
6、所述图像预处理模块,用于进行图像增强后,使用图像分割算法进一步分割水尺图像,对倾斜水尺进行矫正;
7、所述水位定位模块,用于水尺点云做强度累计,通过最大梯度法得到水位线;
8、所述尺标检测模块,用于对矫正后的水尺图像使用目标检测算法检测数字字符,再使用字符识别算法对检测出的数字字符进行ocr识别,再根据数字字符、水位线及水尺图像计算水位值。
9、本发明水位监测方法的步骤包括如下:
10、步骤1,标定模块对相机内参进行标定,对相机、激光雷达外参进行联合标定;
11、步骤2,点云roi定位模块通过聚类提取水尺点云,根据水尺点云及联合外参分割出水尺图像;
12、步骤3,图像预处理模块进行图像增强后,使用图像分割算法进一步分割水尺图像,对倾斜水尺进行矫正;
13、步骤4,水位定位模块对水尺点云做强度累计,通过最大梯度法得到水位线;
14、步骤5,尺标检测模块对矫正后的水尺图像使用目标检测算法检测数字字符,再使用字符识别算法对检测出的数字字符进行ocr识别,再根据数字字符、水位线及水尺图像计算水位值。
15、本发明与现有技术相比较,具有如下优点:
16、第一,本发明系统中的点云roi定位模块,用于通过聚类提取水尺点云,根据水尺点云及联合外参分割出水尺图像,克服了现有技术手动选择水尺图像,相机位置、角度变化后需要重新校准,图像目标检测鲁棒性差的不足,使得本发明在安装时无需校准,设备的位置、俯仰角安装后可调整,提高了水尺图像分割的鲁棒性。
17、第二,本发明的方法增加了对水尺图像进行曝光校正及雨、雪、雾去除操作的图像增强,补充了现有技术未考虑曝光异常、雨、雪、雾等异常气候情况对检测效果的影响,使得本发明可以在复杂环境条件下处理水尺图像,提高了水尺图像的准确度、鲁棒性,同时扩大了水位监测系统及方法的泛用性。
18、第三,本发明的方法利用激光雷达点强度在水、金属、遮挡物上表现出的差异性,对水尺点云做强度累计再根据最大梯度法得到水位线,克服了现有技术易受倒影、漂浮物影响导致水位线偏离真实值的问题,使得本发明可规避倒影影响,有效降低存在漂浮物时水位线的偏离程度。
- 还没有人留言评论。精彩留言会获得点赞!