水密舱水位探测器的设计方法及飞机水密舱水位测量系统与流程
本发明涉及液位探测,具体涉及一种水密舱水位探测器的设计方法以及应用该方法的飞机水密舱水位测量系统。
背景技术:
1、水陆两栖飞机在水面运行时,会因为自然环境、气水动特性和水密舱结构密封设计的影响,水密舱内不可避免存在渗漏水和冷凝水,聚集后会影响飞机重心安全,为保障飞机水面飞行安全可靠,需对水密舱进水情况进行监控,由此可见水位探测器的布局设计尤为重要。
2、为了快速探测到水密设计要求规定的告警边界,一般将水位探测器布置在水密舱结构最低处。当飞机飞行为俯仰姿态时,积水向飞行俯仰角倾斜方向流动聚集。当水位探测器位置与积水倾斜方向一致时,水量聚集触发告警,进水量远低于水平姿态下告警进水值,为虚假告警,影响飞机出勤使用率;当水位探测器位置与积水倾斜方向相反时,进水量超出水平姿态下告警进水值也无法探测到,影响飞机重心安全。
技术实现思路
1、为了解决传统的水位探测器位置安装存在的问题,本发明的目的在于提供一种水密舱水位探测器的设计方法及飞机水密舱水位测量系统,通过飞机船体外形、水密舱分布情况、水密舱最大允许进水量和飞机水面运行姿态变化,对水位探测器的布局设计进行优化,提高了水密舱进水情况监测的准确性和实用性。
2、本发明通过以下技术方案来实现上述目的:
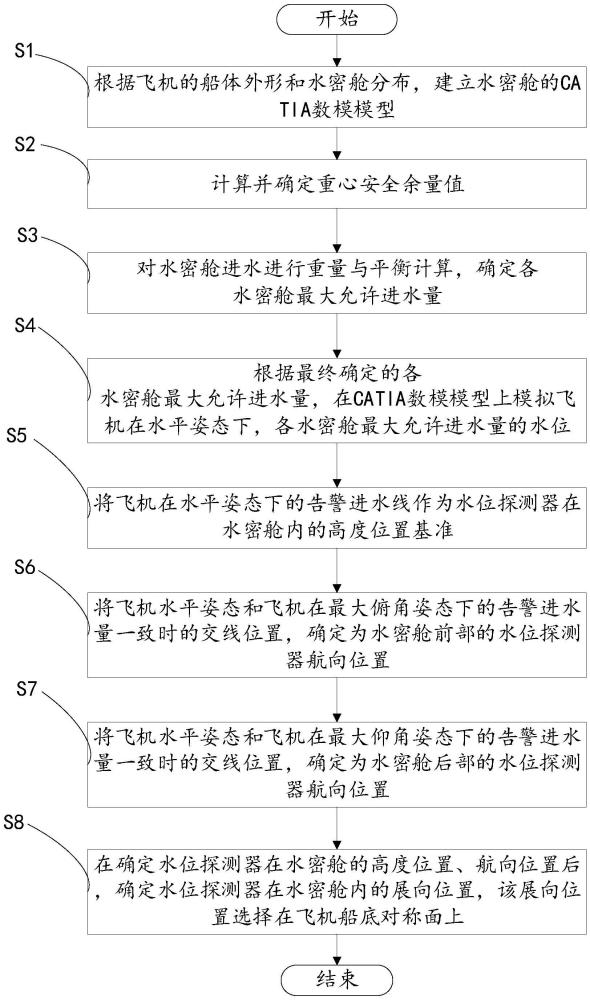
3、一种水密舱水位探测器的设计方法,该方法包括以下步骤:
4、根据飞机的船体外形和水密舱分布,建立水密舱的catia数模模型;
5、计算并确定重心安全余量值;
6、对水密舱进水进行重量与平衡计算,确定各水密舱最大允许进水量;
7、根据最终确定的各水密舱最大允许进水量,在catia数模模型上模拟飞机在水平姿态下,各水密舱最大允许进水量的水位,该水位即为水位探测器在水密舱内的告警进水线;
8、将飞机在水平姿态下的告警进水线作为水位探测器在水密舱内的高度位置基准;
9、将飞机水平姿态和飞机在最大俯角姿态下的告警进水量一致时的交线位置,确定为水密舱前部的水位探测器航向位置;
10、将飞机水平姿态和飞机在最大仰角姿态下的告警进水量一致时的交线位置,确定为水密舱后部的水位探测器航向位置;
11、在确定水位探测器在水密舱的高度位置、航向位置后,确定水位探测器在水密舱内的展向位置,该展向位置选择在飞机船底对称面上。
12、根据本发明提供的一种水密舱水位探测器的设计方法,在确定水密舱前部的水位探测器航向位置时,根据飞机水面俯仰角限制,计算并确定飞机在最大俯角姿态时的告警总进水量≤水平姿态下的告警总进水量,在水密舱catia数模上确定飞机在最大俯角姿态下水密舱的告警水线;
13、通过比较飞机水平姿态和飞机在最大俯角姿态的告警进水量,确定两者一致时的交线位置,即为水密舱前部的水位探测器航向位置。
14、根据本发明提供的一种水密舱水位探测器的设计方法,在确定水密舱后部的水位探测器航向位置时,根据最终确定的飞机水面俯仰角限制,计算并确定飞机在最大仰角姿态时的告警总进水量≤水平姿态下的告警总进水量,在水密舱catia数模上确定飞机在最大仰角姿态下水密舱的告警水线;
15、通过比较飞机水平姿态和最大仰角姿态的告警进水量,确定两者一致时的交线位置,即为水密舱后部的水位探测器航向位置。
16、根据本发明提供的一种水密舱水位探测器的设计方法,所述建立水密舱的catia数模,包括:
17、根据飞机的catia外形数模,提取船体的基础几何模型,根据船体的基础几何模型和水密舱分布,对船体通过生成平面进行分段,形成各水密舱几何模型,分段后采用catia零件设计模块生成水密舱的catia数模模型。
18、根据本发明提供的一种水密舱水位探测器的设计方法,所述计算并确定重心安全余量值,包括:
19、根据飞机的重量重心包线范围和预设的重心允差范围,确定重心安全余量值,其中,飞机重量重心包线是指民用飞机在各飞行使用阶段中,允许使用的所有重心位置包络线,飞机重量重心包线范围由飞机允许使用的前、后重心极限确定;预设的范围重心允差为整个重心范围的7%。
20、根据本发明提供的一种水密舱水位探测器的设计方法,所述确定各水密舱最大允许进水量,包括:
21、首先判断各水密舱重心和空机重心的大小关系,将水密舱重心分为空机重心前、后两个数据集,根据确定的水密舱外形容积确定各水密舱相对于基准水密舱的体积系数比;利用体积系数比,选择第1号水密舱作为计算基准,定义各水密舱初步的最大允许进水量,并在catia数模模型上确定各水密舱最大允许进水量的重心,结合水密舱重心前、后数据集开展飞机空机重心前后进水重量与平衡分析,以此迭代计算,直至满足安全重心余量允许值δx,最终确定各水密舱最大允许进水量。
22、根据本发明提供的一种水密舱水位探测器的设计方法,水位探测器在水密舱的高度位置与水密舱最大允许进水量正相关,最大允许进水量越大,水位探测器在水密舱的高度位置越向上。
23、根据本发明提供的一种水密舱水位探测器的设计方法,利用流体动力学软件对水密舱在不同姿态角下的水流情况进行动态模拟,以更精确地预测进水情况和液位变化。
24、一种飞机水密舱水位测量系统,包括:水位探测器、水密电缆、水位计算机、水密舱,所述水位探测器采用如权利要求1所述的一种水密舱水位探测器的设计方法进行布置在水密舱内部,通过水密电缆与水位计算机连接,用于探测水密舱的水位;所述水密舱分布于飞机船底,单个水密舱内布置两个水位探测器,沿飞机航向分别布置在水密舱前部和后部,以覆盖测量飞机不同姿态角下水密舱的进水液位;所述水密电缆安装固定在水密舱壁板上;所述水位探测器的水位信号实时发送至水位计算机,水位计算机实时对水位信号进行处理。
25、根据本发明提供的一种飞机水密舱水位测量系统,所述水密电缆通过支架和卡箍安装固定在水密舱壁板上。
26、由此可见,本发明具有以下有益效果:
27、1、本发明通过catia数模模型建立水密舱的精确模型,能够高度还原飞机的实际结构,确保后续计算和分析的准确性。
28、2、本发明通过飞机船体外形、水密舱分布情况、水密舱最大允许进水量和飞机水面运行姿态变化,对水位探测器的布局设计进行优化,提高了水密舱进水情况监测的准确性和实用性。
29、3、本发明避免了传统将水位探测器布置在水密舱结构最低处,尽可能减少误报和漏报的情况,以及避免了水位探测器位置与积水倾斜方向相反时,超出告警进水值也无法探测到等问题。
30、4、本发明方法不仅考虑了飞机在水平姿态下的告警进水线,还考虑了飞机在最大俯角和最大仰角姿态下的告警进水量,确保了在不同飞行姿态下,水位探测器都能准确反映水密舱的进水情况。通过在catia数模模型上进行模拟,全面考虑了飞机各部位、各姿态下的水位变化,使得水位探测器的设计更加全面和系统。
31、5、本发明确定水位探测器的高度位置、航向位置和展向位置后,可以直接指导实际安装工作,提高了设计的可实施性。
32、下面结合附图和具体实施方式对本发明作进一步详细说明。
- 还没有人留言评论。精彩留言会获得点赞!